深V型艇系列模型纵向运动试验研究
2010-03-23姚朝帮董文才岳国强
姚朝帮,董文才,许 勇,岳国强
(1.海军工程大学 船舶与动力学院,湖北 武汉 430033;2.中国舰船研究设计中心,湖北 武汉 430064)
滑行艇在静水中具有较好的快速性,因此得到较广的应用.常规的滑行艇普遍采用较小的艇底斜升角,艇重不变时,采用较小的艇底斜升角能提供更大的滑行面,有利于提高静水快速性,但会导致波浪中性能恶化.著名的滑行艇美国系列62的艇底采用较小的斜升角,从舯部到艇艉保持12.5°不变[1],它的快速性较优,但波浪中的运动幅度较大.为了改善美国系列62在波浪中的运动性能,荷兰Keuning等学者将该系列舯后部艇底斜升角12.5°分别增大到25°和30°,并尽可能保持其他艇型参数不变.Keuning的试验结果表明舯后部艇底斜升角增大后耐波性得到改善,但当折角线长与最大折角线宽之比LP/BPX较小时,阻力增量较大[2-3].为了克服艇底斜升角增大后存在的耐波性改善与静水阻力性能变差之间的矛盾,Keuning开展了艇底纵向扭曲的研究[4],将底部斜升角从舯部25°连续变换到艉部5°,这为兼顾快速性和耐波性对艇型的不同要求提供了一种可能的解决途径,但Keuning的研究只是尝试性的,其结果还不能为深V型艇型设计提供依据.Fridsma对艇舯后部斜升角为10°、20°、30°而长度可变的系列船模在静水和规则波、不规则波中进行了试验,考虑了纵倾角、面积负荷、速度、长宽比及波浪大小对纵向运动性能的影响[5],但并未能考虑艇艉底部横向斜升角的变化.深V型艇的阻力及波浪中纵向运动性能影响因素较多[6-8],国内对深V型艇纵向运动进行了初步研究,得出了深V型艇在波浪中纵向运动随航速的变化规律[9],但未能研究艇型参数变化对纵向运动性能的影响.为了获得快速性和耐波性兼优的高速艇线型,开展了本文的试验研究.
1 试验模型及试验设备
1.1 试验模型
试验模型共5条,它们的折角线投影长宽比LP/BPX均为 4.981,面积负荷系数 AP/▽2/3均为6.051.纵向运动试验时,重心纵向相对位置Xcgp为6%,艇艉舯部斜升角βM=24.6°,但它们的艉部斜升角βA依次是5°、10°、15°、21.5°、25°.其中Ap为艇底部折角线投影面积,▽为排水体积,重心纵向相对位置Xcgp=(XAP-Xg)/LP,其中XAP为折角线投影面AP的形心,Xg为重心纵向位置.
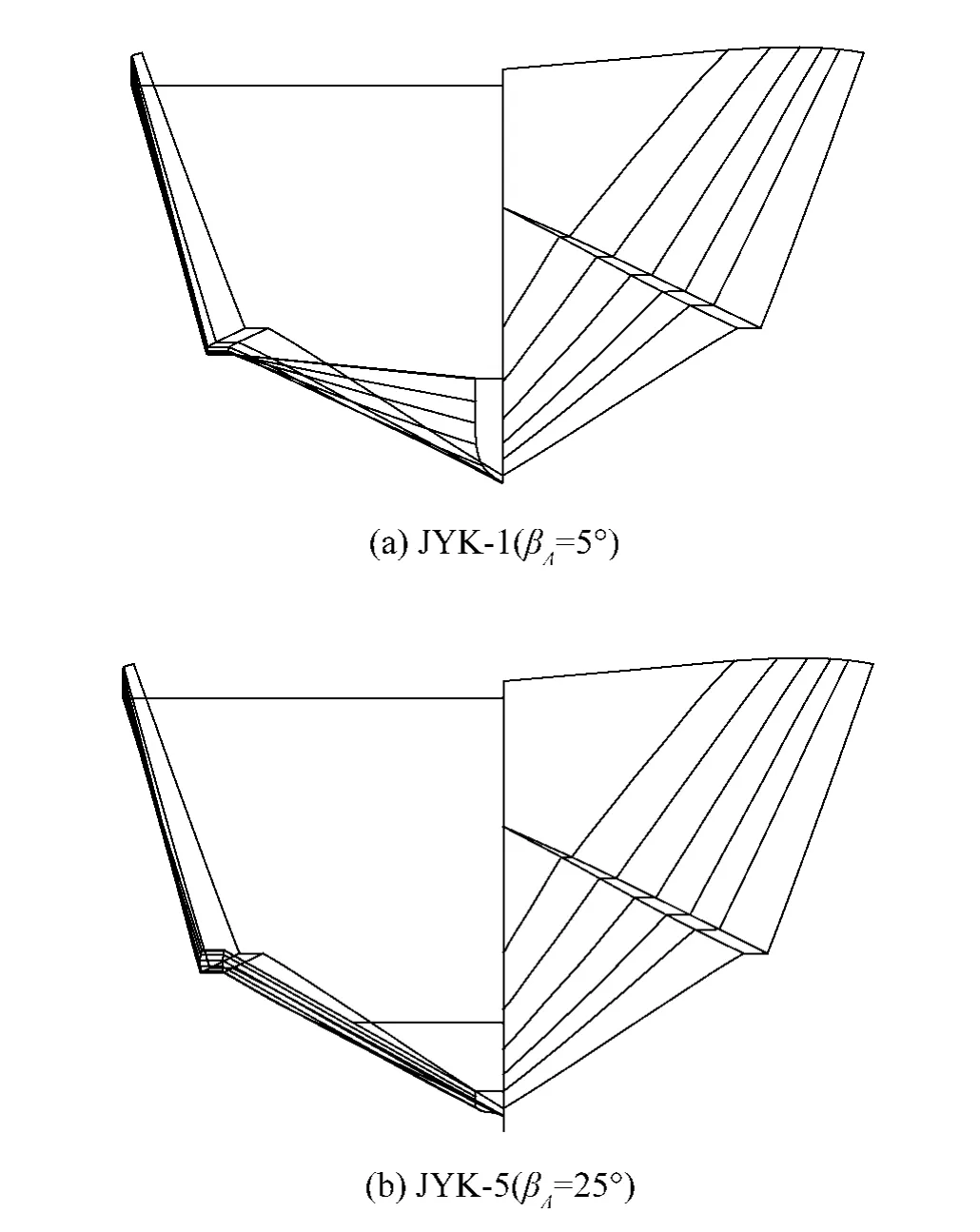
图1 JYK系列模型横剖线图Fig.1 Body plans of JYK
5条模型的舯前部相同,舯后部的折角线相同.为了保证折角线相同,艉部斜升角变化引起了艉部龙骨高度的变化.为了更直观地说明艉部斜升角变化带来的艉部线型的变化,图1给出了模型JYK-1和JYK-5的横剖线图.更详细的试验模型照片及试验数据见文献[10].
1.2 试验设备
试验于2008年3月下旬在中国特种飞行器研究所高速拖曳水池里完成.试验水池长510 m,宽6.5 m,水深5 m.波浪由16片摇板式造波机产生,波高由固定式浪高仪测量,浪高仪固定在摇板式造波机前方60 m处.阻力的测量采用BLR-1型拉力传感器和TEAC SA-55直流放大器,BLR-1型拉力传感器量程为0~40 N,精度为0.2%.运动加速度的测量采用 FML-A100加速度传感器,量程为±3g(g重力加速度),误差为1%.纵摇的测量采用TC-11A型垂直陀螺仪,测量误差小于0.1°.垂荡采用拉线式位移传感器测量,误差为1%.
2 试验结果及分析
试验波长范围为1.5~13 m,对应的波长船长比λ/LP=0.6~5.2;艇模速度 V=2.44 m/s、4.55 m/s,对应的体积傅氏数依次为 F▽=1.18、2.20.
2.1 艉部斜升角变化对垂荡响应的影响
图2给出了速度2.44、4.55 m/s时艉部斜升角变化对垂荡的影响曲线,其中ξa为波幅,Za为垂荡单幅值.

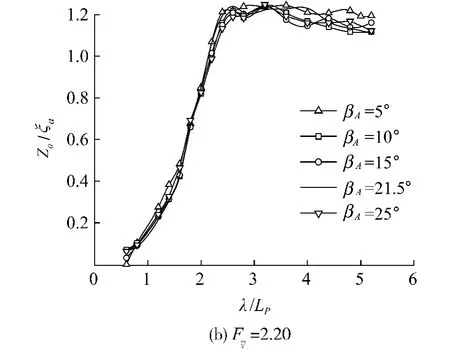
图2 艉部斜升角对垂荡的影响Fig.2 Heave amplitude at different deadrise
由图2可知:当体积傅氏数F▽=1.18时(排水航行状态),艉部斜升角βA由5°增加到25°,引起1.8≤λ/LP≤2.8范围内垂荡幅值下降,在垂荡峰值处(λ/LP=2.4),βA由5°增加到25°,垂荡幅值减少9.8%;当体积傅氏数F▽=2.2时(半滑行状态),艉部斜升角也会引起垂荡峰值附近垂荡幅值的下降,不过下降的幅度较小.对于λ/LP≤1.6范围内,艉部斜升角变化对垂荡幅度的影响不大.综上所述: JYK系列深V型艇,艉部斜升角增加会引起垂荡峰值附近垂荡幅值的下降,排水航行(F▽=1.18)时,垂荡下降较为明显,半滑行状态(F▽=2.2)时,垂荡幅值下降的程度较小;较短波长范围内,艉部斜升角变化对垂荡幅度的影响甚微.
2.2 艉部斜升角变化对纵摇响应的影响
图3给出了速度2.44、4.55 m/s时艉部斜升角变化对纵摇的影响,其中θa为纵摇单幅值,k为波数.

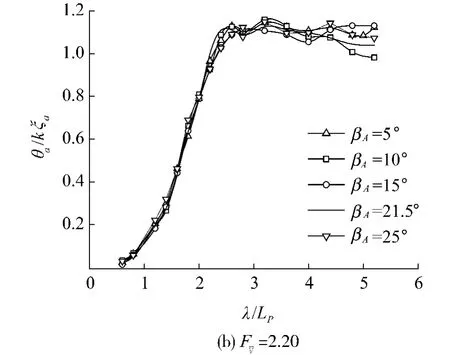
图3 艉部斜升角对纵摇的影响Fig.3 Pitch amplitude at different deadrise angles
由图3可知:当体积傅氏数F▽=2.2时,艉部斜升角变化对纵摇的影响不大,只是在长波(λ/LP>4)范围内,βA=10°时的纵摇值小于其他艉部斜升角时的纵摇值;当艇体处于排水航行状态(F▽=1.18),在波长较长时(1.8≤λ/LP<4.4),艉部斜升角βA=15°所对应的纵摇值最小,其他艉部斜升角时的纵摇值基本相当.
2.3 艉部斜升角变化对垂向运动加速度的影响
图4~6分别给出了速度2.44、4.55 m/s时艉部斜升角变化对艏部、重心处、艉部垂向运动加速度的影响,其中aF、aG、aA依次为艏部9.5站处、重心处(Xcgp=6%)、艉部0站处的垂向运动加速度.
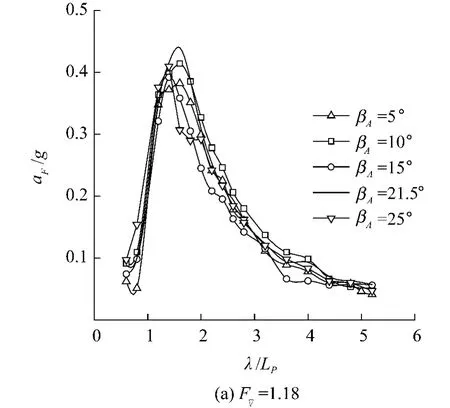

图4 艉部斜升角对艏部垂向运动加速度的影响Fig.4 Vertical acceleration of bow at different deadrise angles
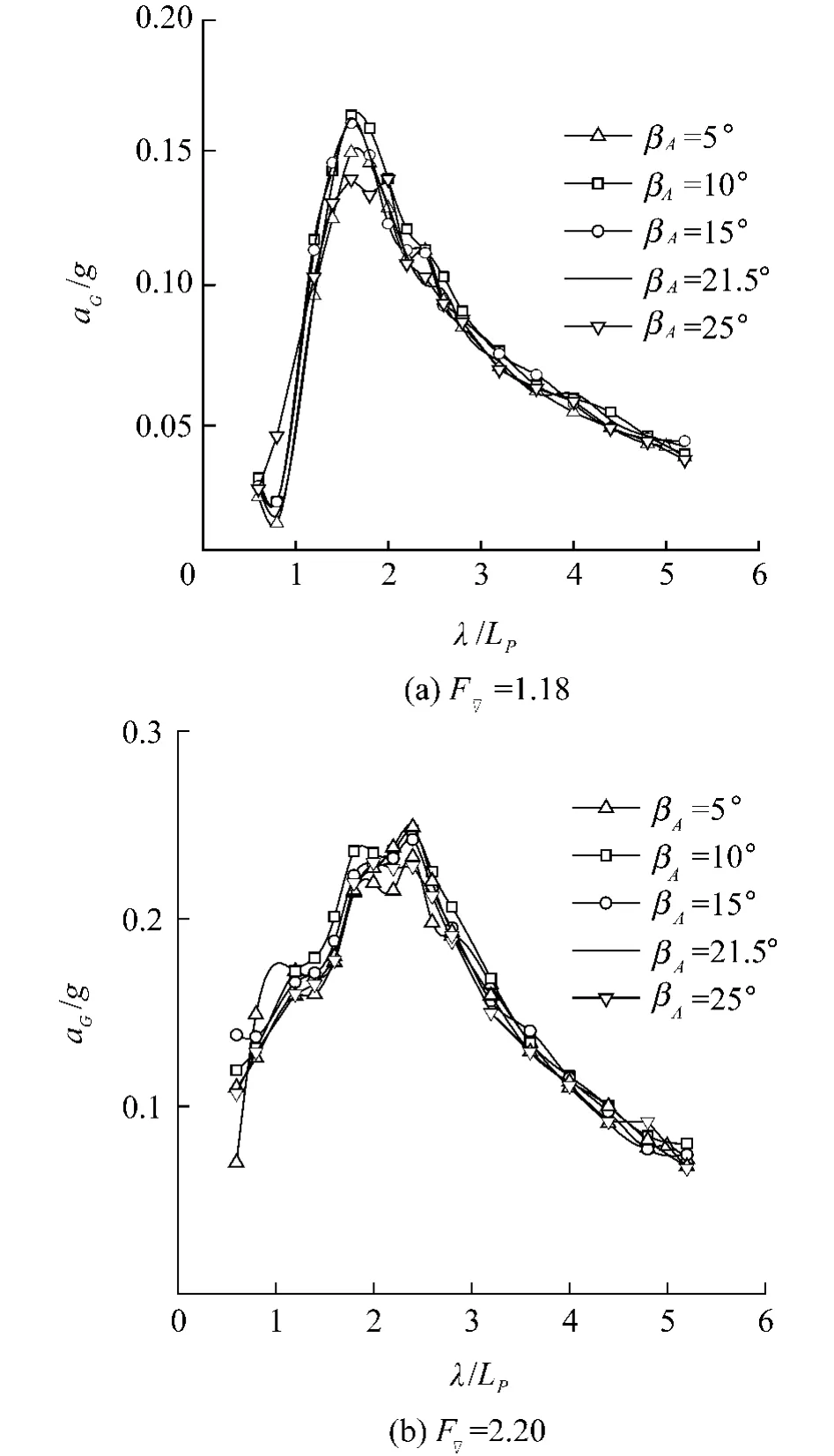
图5 艉部斜升角对重心处垂向运动加速度的影响Fig.5 Vertical acceleration of center of gravity at different deadrise angles
由图4~6可知:当艇处于排水航行且波长较长时(F▽、λ/LP>1.6),βA=10°时的艏部及艉部垂向运动加速度比其他艉部斜升角时的加速度略大0.02g~0.04g,考虑到加速度测量误差为0.03g,可以认为艉部斜升角变化对艏部、重心处、艉部垂向运动加速度的影响不大.
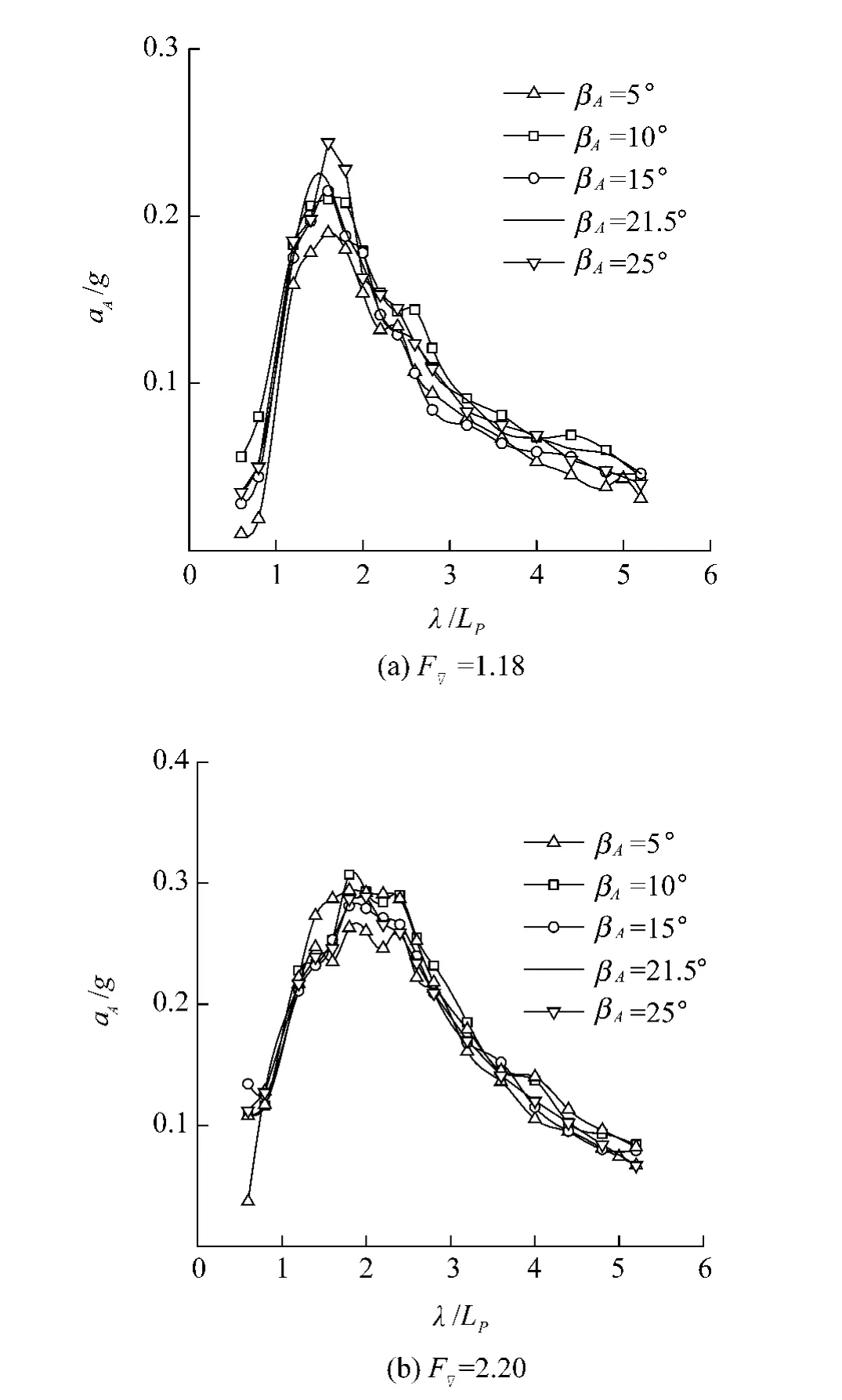
图6 艉部斜升角对艉部垂向运动加速度的影响Fig.6 Vertical acceleration of stern at different deadrise angles
2.4 艉部斜升角变化对波浪中阻力的影响
图7中给出了速度2.44、4.55 m/s时艉部斜升角变化对阻力的影响,Rt表示阻力.试验时名义波高60 mm,但不同波长时实测波高有所差别.考虑到不同波长时实际波高的变化,为了便于分析艉部斜升角变化对阻力的影响,图8中还给出了速度2.44、4.55 m/s时JYK模型单位波高阻力的比较.
从图7、8可知:艉部斜升角变化对波浪中阻力的影响并不是单调的,在所测波长范围内,当艇体处于排水航行状态(F▽=1.18),艉部斜升角βA=10°的阻力最小,βA=15°时的阻力较小,βA=25°时艇体阻力最大;当艇体处于半滑行状态(F▽=2.2)时,艉部斜升角βA=10°的阻力最小,βA=15°时的阻力较小,βA=5°时艇体阻力最大.若以JYK-1(βA=5°)在波浪中的阻力为基准,F▽=1.18时,βA=10°、15°的单位波高阻力分别减少5.7%、3.4%,βA=21.5°、25°的阻力分别增加1.2%和4.9%;F▽=2.2,βA= 10°、15°、21.5°、25°的单位波高阻力分别减少7.8%、4.4%、5.1%、2.6%.
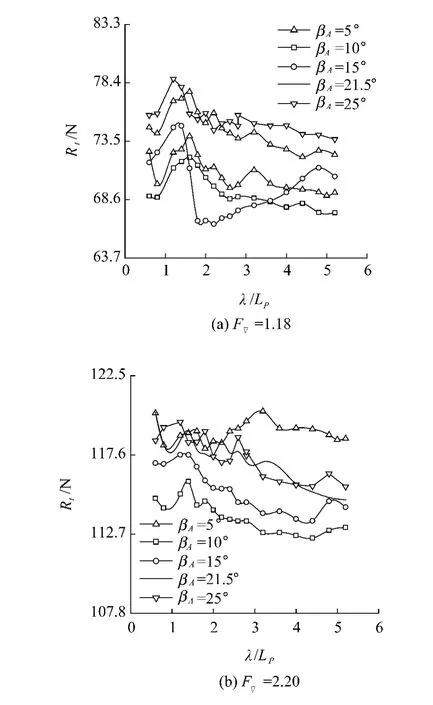
图7 艉部斜升角对波浪中阻力的影响Fig.7 Resistances at different deadrise

图8 艉部斜升角对单位波高阻力的影响Fig.8 Resistances per wave height at different deadrise angles
3 结论
1)迎浪规则波中航行时,在所测波长范围内,当艇体处于排水航行状态(F▽=1.18),艉部斜升角10°的波浪阻力最小,15°的阻力较小,25°的阻力最大;当艇体处于半滑行状态(F▽=2.2)时,艉部斜升角10°的波浪阻力最小,15°的阻力较小,5°的阻力最大.
2)JYK系列深V型艇艉部斜升角增加会引起垂荡峰值附近垂荡幅值下降,排水航行(F▽=1.18)时,垂荡下降较为明显,最大降幅达9.8%;半滑行状态(F▽=2.2)时,垂荡幅值下降的程度较小;较短波长范围内,艉部斜升角变化对垂荡幅度的影响甚微.
3)当体积傅氏数F▽=2.2时,艉部斜升角变化对纵摇的影响不大,只是在长波(λ/LP>4)范围内,艉部斜升角10°时的纵摇值小于其他艉部斜升角时的纵摇值;当艇体处于排水航行状态(F▽=1.18),在波长较长时(1.8≤λ/LP<4.4),艉部斜升角15°所对应的纵摇值最小,其他艉部斜升角时的纵摇值基本相当.
4)深V型艇艉部斜升角变化对艏部、重心处、艉部垂向运动加速度的影响不大.
[1]CLEMENT E,BLOUNT D.Resistance tests of a systematic series of planing hull forms[J].Trans SNAME,1963,71: 491-579.
[2]KEUNING J,GERRITSMA J.Resistance tests of a series of planing hull forms with 25 degrees deadrise angle[R].PB82-253667,1982.
[3]KEUNING J,GERRITSMA J.Resistance tests of a series planing hull forms with 30 degrees deadrise angle,and a calculation model based on this and similar systematic series[R].PB94-110673,1993.
[4]KEUNING J.Resistance tests of two planing boats with twisted bottom[R].PB87-176095,1987.
[5]FRIDSMA.A systematic study of the rough water performance of planing boats[R].Davidson Laboratory Technology Report R-1275,1969.
[6]董文才,郭日修.滑行艇阻力研究进展[J].船舶力学,2000,4(4):68-81.
DONG Wencai,GUO Rixiu.State of the art of prediction on resistance of planing crafts[J].Journal of Ship Mechanics,2000,4(4):68-81.
[7]吴晓光,石仲埅,曹为午.滑行艇船型优化设计[J].船舶工程,2005,27(3):15-19.
WU Xiaoguang,SHI Zhongkun,CAO Weiwu.Optimization design of planing boat hull form[J].Ship Engineering,2005,27(3):15-19.
[8]岳国强,姚朝帮,董文才.深V型滑行艇静水阻力性能影响因素研究[J].中国舰船研究,2009,4(3):24-27.
YUE Guoqiang,YAO Chaobang,DONG Wencai.Study of influence factors on resistance of deep-V planing craft in still water[J].Chinese Journal of Ship Research,2009,4 (3):24-27.
[9]董文才,岳国强.深V型滑行艇纵向运动试验研究[J].船舶工程,2004,26(2):14-16.
DONG Wencai,YUE Guoqiang.Experimental study on longitudinal motion of deep-V-shaped planing craft[J].Ship Engineering,2004,26(2):14-16.
[10]董文才,欧勇鹏,许勇,等.深V型滑行艇系列模型纵向运动试验研究报告[R].武汉:海军工程大学,2008: 3-7.
DONG Wencai,OU Yongpeng,XU Yong,et al.A systematic experimental study on longitudinal motion of deep-V planing crafts in waves[R].Wuhan:Naval University of Engineering,2008:3-7.
