基于修正的Snake模型与特征对象法的多运动目标分割*
2010-03-19陈炳权刘宏立
陈炳权,刘宏立
(1.湖南大学电气与信息工程学院,湖南长沙 410082;2.吉首大学物理科学与信息工程学院,湖南吉首 416000)
多运动目标分割是从动态图像序列中检测出运动目标,并将其与背景分离[1-6],目前其检测的瓶颈在于背景的动态变化,如光照、影子、天气等因素干扰,其精确性和准确性直接影响到目标的分割.分割的难点通常在于阴影的处理,如目标物的阴影与目标物相连;遮挡的处理,如运动目标的自遮挡、运动目标之间的遮挡、运动目标被景物遮挡等;干扰的影响,如植物的摆动、植物的阴影、水面的镜面反射.图像序列是一组按时间顺序排列的瞬间图像,不同时刻采集的二帧或多帧图像中包含了存在于相机与景物之间的相对运动信息,分割就是为了获得感兴趣的各种视知觉信息.目前由于建模算法的局限性,加上人们对视频分割的实时性和通用性的需求,运动目标分割仍然是目前研究的重要课题.
传统的分割算法主要有背景减除建模法、帧间差分算法、基于光流场和运动参数估计的分割方法[7]、基于形态学方法[8]、运动跟踪法、基于分类的算法[9]、辅助方法[10].为了得到精确的目标外轮廓,通常使用Snake模型进行外轮廓的提取,该模型是动态“主动”轮廓模型,1987年由Kass等人提出,其定义一个能反映目标轮廓与灰度等信息的能量函数,通过寻找自身能量函数的局部极小值,由初始位置向真实轮廓靠近,从而有较强的抗噪声能力.本文提出了一种基于特征对象的运动目标分割算法,并将该法与修正的Snake模型结合进行了运动目标的分割.分析和实验证明:该算法需要调整的参数少,抗干扰能力强,可以有效地消除多帧间运动目标的遮挡,能精确定位各个运动目标的外轮廓.
1 基于特征对象的帧间差分算法
基于特征对象的多运动目标自动分割算法实质是基于时间差分法的改进算法,当图像序列中的背景比较稳定时,相邻帧之间像素值变化大的区域就对应于运动目标.为了提高其准确性,通常增强背景的稳定性,采用全局运动估计和补偿的方法,其模型如下:为补偿摄像机本身的运动或运载平台的运动所造成的视频图像中背景发生变化,先对当前视频帧进行全局运动估计和补偿.任取帧fi和fi+1,用
Sfi(x0,y0)表示帧fi的像素灰度值,则

式中:a1,a2,…,a8为待估计的运动参数.为了减少计算量,采用3层金字塔的层次块匹配出各个观察点像素的位移,当估计的运动参数a1-1,a2,a3,a4,a5-1,a6,a7,a8中的绝对值有一个大于2.5时,则进行相应的运动补偿[9],相邻二帧像素灰度差

其中f(x,y,ti),f(x,y,ti-1)表示了时刻ti,ti-1的相邻二帧图像.当PDi的像素值超过一定的阈值时,则认为物体是运动的.但这对噪声如光照条件的变化、云和草地的缓慢变化仍然比较敏感,于是定义符号差分为

式中:MADi是第i帧和第i+1帧的平均绝对差;MADi-1是第i-1帧和第i帧的平均绝对差;SDMADi是某帧fi的二次导数,则对选取的阈值不敏感,当没有景物变化时,SDMADi仍然在零附近有小的波动.
2 基于特征对象与修正的Snake混合模型算法
2.1 混合算法原理
特征对象是一种几何特征,由改进的KL变换从原始图像序列中计算而得,它不仅具有运动对象的位置、形状等信息,而且与原图像序列的中间帧图像相对应.本文提出了基于特征向量的运动目标分割算法,采用将时间信息和空间信息相结合的办法,先使用边缘检测算子检测特征对象的边缘,由于特征对象中只含有运动目标,所以检测到的边缘则为运动目标的边缘.在检测边缘时,利用纹理信息去除阴影,然后使用形态学算子对边缘提取的结果进行填充,并使用连通算子计算连通区域,消除残余的噪声.最后使用修正的Snake模型进行外轮廓提取.笔者设计的运动目标分割及外轮廓精确提取算法的流程如图1所示.
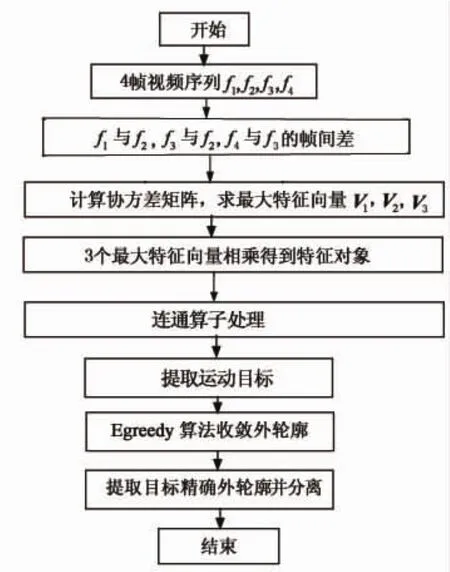
图1 多运动目标分割算法流程Fig.1 Algorithm process about multi-movement targets division
2.2 特征对象的运动目标检测算法
背景差分法对噪声敏感,若直接用背景差分结果求二值图像,运动对象会淹没在噪声中.提取最大特征向量,可以改进运算的结果[11].好的分类是类中各元素与该类有很大的相关性,且在相似性矩阵中彼此有比较大的值.对于运动目标来说,可以利用特征向量区分运动物体与静止物体,由于计算特征向量时使用了零均值向量,可以从理论上消除背景,PCA已具备这一条件,其第一特征向量代表最大方差的方向且对应于运动物体.但当运动物体速度较快时,第一特征向量中运动物体的边缘出现了模糊现象,由此检测出的运动区域大于实际的运动区域.文献[11-13]指出:对于整体运动的对象如刚体,可认为序列图像前后帧差图像灰度边缘重合的部分为中间帧运动对象的边缘,从而有效地解决了运动对象前后帧的遮挡问题.于是将KL变换进行改进,使之更符合图像序列中运动目标的检测,本文设计的算法如下:
1)协方差矩阵M的计算:通常计算协方差矩阵方法使用零均值向量,为了便于检测连续帧中的运动目标且消除遮挡,可以将协方差矩阵M的计算方法设计为:

式(4)使用了3个向量A,B,C,其代表了4帧图像序列中的前后帧间差.
2)特征对象V的定义:利用改进后的式(4)计算出与最大3个特征值对应的3个特征向量为V1,V2和V3,将其乘积定义为特征对象为

从式(5)可知,特征对象V不但具有运动对象的位置和形状等信息,而且代表的运动对象与原图像序列的中间帧的运动目标相对应,所以利用特征对象V与原始图像中运动目标的对应关系即可进行目标分割.
2.3 修正的Snake模型的多运动目标外轮廓提取
将特征对象V变为二值图像,从而表示出运动目标的位置,然后利用V与原始图像的位置对应关系提取出运动目标,通常由于运动对象表面纹理不够,从而导致二值目标内部空洞及背景的部分小噪声现象,可采用数学形态学中的填充、开关等算子对其进行内部填充、除噪及边缘平滑处理.对于复杂背景的序列帧,由于存在较大的背景噪声,本文使用连通算子操作,对二值图像进行连通区域的标注,认为构成运动目标的连通区域的面积比噪声连通区域大很多,设定阈值从而排除噪声区域.然而由特征对象V得到二值图像时为了降低噪声,对初始阈值的要求比较严格.若阈值选取偏大,则得到不完整的运动目标;阈值选取偏小,则提取结果中不但包括运动目标,还包含了目标周围小范围的背景.
本文设计了合适的后续算法,从而可以降低阈值对算法的约束性,即修正的Snake模型:定义图像轮廓vi=(xi,yi),(i=0,1,2,…,n).其模型参数v(s)=(x(s),y(s)),且s∈[0,1]为归一化曲线长度,动态轮廓的总能量函数为[5,11]

式中:Eint为内部能量;Eimage为图像作用力产生的内部能量;Econ为约束能量,且
具体推导过程参见文献[11,14].
最小化Snake能量函数的算法中greedy算法虽然不能达到最优解[15],保留了动态规划算法可靠性高、稳定性好的优点,且计算简单.但原始greedy算法中,内部收缩力很难和图像特征吸引力达到平衡,从而造成轮廓过收缩或没有达到实际轮廓的现象.基于这一问题,运动边缘注册轮廓收缩算法,在贪婪greedy算法的基础上增加外部约束力:在轮廓进行收缩时,若轮廓点到达其对应的运动边缘点,则在运动边缘图中对此点进行注册,已经注册过的点认为已经达到了它最终的位置,不再移动.对于运动边缘图中边缘断点造成的轮廓点没有对应的运动边缘点的情况,采用贪婪greedy算法运用能量最小化准则可以平滑连接真实运动轮廓点之间的断点.
3 实验结果分析
实验利用Matlab7.8进行软件仿真,测试序列为公用序列.选取室外复杂背景下多运动目标的视频序列为测试对象,并与一些经典的算法进行了比较,将实验结果与手工分割的groundtruth结果进行比较分析.
图2所示为室外环境下多运动目标(人和车子)的分割过程与结果,图像序列中的4帧可以不连续,但相隔要近.分割的背景包括了一组建筑物,还有远处的树木、停车场中的多辆汽车、大片的草地以及运动目标的影子.由4帧图像计算出的特征对象表明:在原始目标分辨率较低的情况下,利用式(4)和式(5)进行运动目标检测时,运动目标后方的阴影与运动目标的可分离度较高,检测结果基本不受阴影的影响.对于汽车而言,由于汽车下方的阴影与汽车相连,且相对于汽车阴影面积占据一定的比例,在进行形态滤波时,造成部分阴影与目标粘连,对运动目标的检测产生了一定的影响.图2(e)为计算出的特征对象,该图包含了丰富的运动目标位置、形状等信息,可进一步进行静态分割.图2(f)为对特征对象的边缘检测结果,其中包含了一些噪声.图2(i)为本文提出的算法分割结果.经比较可以看到,由特征对象法提取的运动目标位置准确,与实际目标形状上的贴和度也较高.
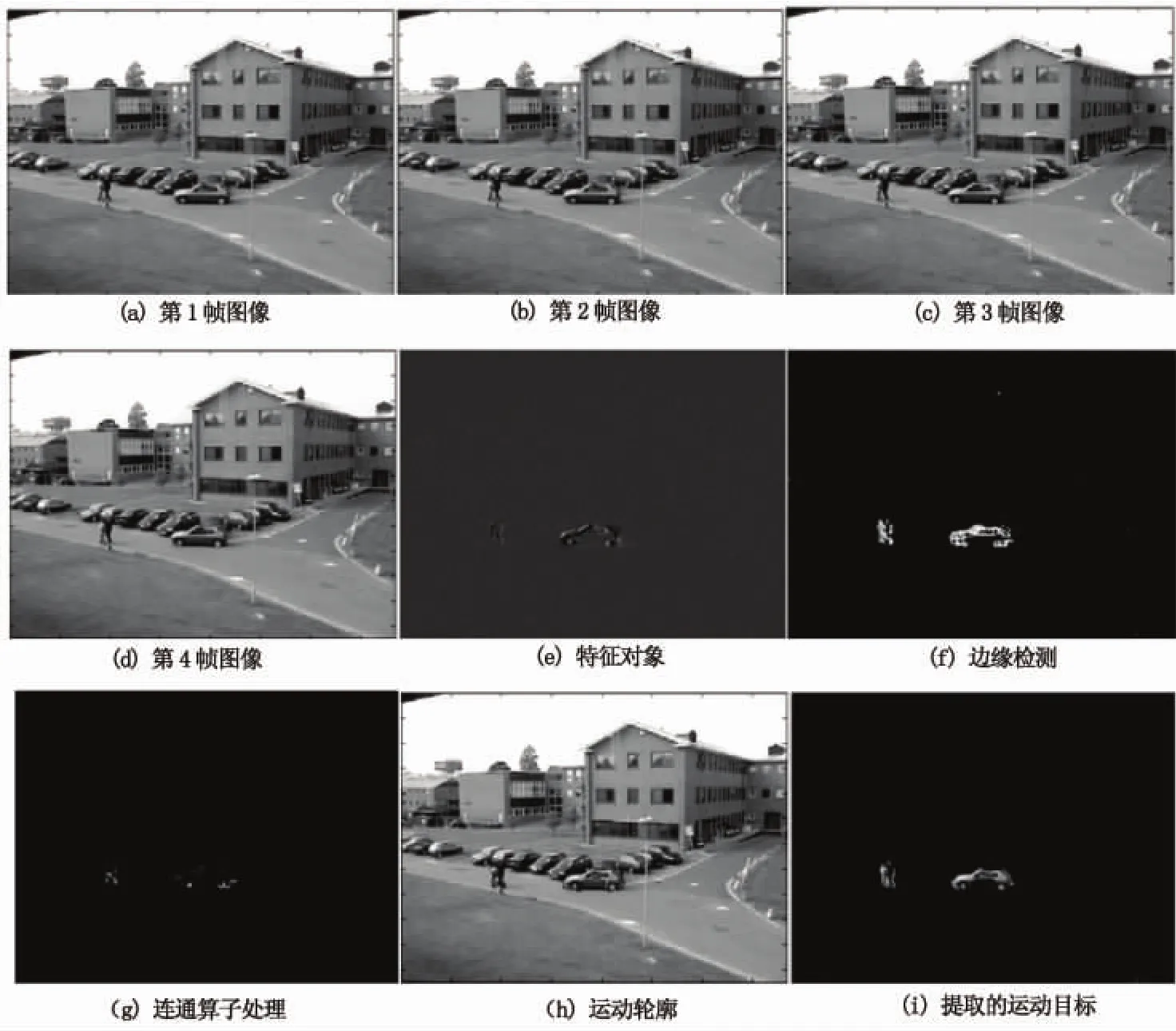
图2 室外环境多运动目标分割过程及结果Fig.2 The process and solution of division about multiple moving targets in outdoor condition
表1为修正的Snake模型提取的目标与手工分割的目标之间、特征对象法提取的目标与手工分割目标间的超出比与收缩比[11]等参数.从表1中可以看到,对同一幅图像,特征对象法的超出比要大于修正的Snake模型法的超出比,即特征对象法提取的目标外轮廓更大一点.从总像素点数目差来看,特征对象法没有匹配上的像素点也更多些.2种算法提取的目标外轮廓与手工提取的目标外轮廓贴近度都较高,修正的Snake模型贴近度更高些.

表1 参数比较Tab.1 Comparison of parameters
以上实验结果显示,特征对象法可准确检测出图像序列中的运动目标并进行目标分割.但由于受到阈值的制约,提取的目标轮廓与目标不很贴近.而使用修正的Snake混合模型则可得到更为精确的运动目标外轮廓.
4 结 论
在分析多运动目标分割算法的基础上,以计算简单、速度快、能准确分割运动目标并精确提取目标外轮廓为原则,提出了基于特征对象的多运动目标自动分割算法,并在该算法的基础上设计了基于修正的Snake模型的运动目标外轮廓精确提取算法,将提取的运动目标与手动分割的运动目标进行比较,大量的实验数据和结果证明,本文方法有效,且抗干扰能力强,有效地消除了运动间的遮挡.
[1] 方帅,薛方正,徐心和.基于背景建模的动态目标检测算法的研究与仿真[J].系统仿真学报,2005,17(1):159-161.FANG Shuai,XUE Fang-zheng,XU Xin-he.Moving object detection based on self-adaptive background modeling[J].Acta Simulata Systematica Sinica,2005,17(1):159-161.(In Chinese)
[2] 卢官明,郎苏娟.基于YCbCr颜色空间的背景建模及运动目标检测[J].南京邮电大学学报:自然科学版,2009,29(6):17-22.LU Guan-ming,LANG Su-juan.Background modeling and moving object detection based on YCbCr color space[J].Journal of Nanjing University of Posts and Telecommunications:Natural Science,2009,29(6):17-22.(In Chinese)
[3] 周箴毅,胡福乔.基于背景建模的动态场景目标检测[J].计算机工程,2008,34(24):203-205.ZHOU Zhen-yi,HU Fu-qiao.Object detection in nonstationary scenes based on background modeling[J].Computer Engineering,2008,34(24):203-205.(In Chinese)
[4] 徐玮,王炜,张茂军,等.虚拟实景对象建模与表现[J].计算机仿真,2009,26(12):214-217.XU Wei,WANG Wei,ZHANG Mao-jun,et al.Modeling and presentation of virtual reality object[J].Computer Simulation,2009,26(12):214-217.(In Chinese)
[5] GAVRILA D M.The visual analysis of human movement:a survey[J].Computer Vision and Image Understanding,1999,73(1):82-98.
[6] XU H F,AYOUNIS A A,KABUKA M R.Automatic moving object extraction for content-based applications[J].IEEE Transactions on Circuits and Systems for Video Technology,2004,4(5):796-812.
[7] NETI A,COLONNESE S,RUSSO G,et al.Automatic moving object and background separation[J].Signal Processing,1998,66(2):219-232.
[8] GHARAVI H,MILLS M.Block-matching motion estimation algorithms-new results[J].IEEE Transaction on Circuits and Systems,1990,37(5):649-651.
[9] DANIEL G P,CHUANG G,SUN M T.Semantic video object extraction using four-band water shed and partition lattice operators[J].IEEE Transactions on Circuits and Systems for Video Technology,2001,11(5):603-618.
[10]LOANNIS K,MICHAEL G S.Spatio-temporal segmentation and tracking of objects for visualization of video conference image sequences[J].IEEE Transactions on Circuits and Systems Video Technology,2000,10(8):1388-1402.
[11]李春明.视频图像中的运动人体检测和人脸识别[D].西安:西安电子科技大学,2005.LI Chun-ming.Moving human body detection and face recognition in video images[D].Xi′an:Xi′dian University,2005.(In Chinese)
[12]WANG Xiao-gang,TANG Xiao-ou.A unified framework for subspace face recognition[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(9):1222-1223.
[13]DUBUISSON M P,JAIN A K.Contour extraction of moving objects in complex outdoor scenes[J].International Journal of Computer Vision,1995,14(1):83-105.
[14]KASS M,WITKIN A,TERZOPOULOS D.Snakes:active contour models[J].International Journal of Computer,2007,39(4):321-331.
[15]ZHANG Deng-sheng,LU Guo-jun.Review of shape representation and description techniques[J].Pattern Recognition,2004,37:1-19.
