基于模糊自适应PI控制的有源电力滤波器仿真
2010-03-19于树海余锐琴
于树海 余锐琴
(1.广西电网公司北海供电局,广西 北海 536000;2.南宁糖业股份有限公司,南宁 530000)
1 引言
电力系统中非线性负荷日益增多,使得大量的谐波和无功电流注入电网,引起了电网电压闪变、频率变化、三相不平衡和电网电压波形的畸变。这种电能质量的下降严重影响着供、用电设备的安全与经济运行。因此,如何改善电能质量,对供电系统的谐波与无功进行补偿,是摆在人们面前的一个重要而有现实意义的课题。目前,公认的在谐波源附近或公用电网节点装设并联型或串联型有源滤波器,可以有效地起到补偿或隔离谐波的作用,并联型有源滤波器(SAPF)还可以进行无功功率补偿。
并联型有源电力滤波器的基本原理如图1所示。它是通过向电网注入与原有谐波和无功电流大小相等方向相反的补偿电流,使电网的总谐波和无功电流为零,从而达到净化电网的目的。因此如何控制逆变器产生与指令电流相同的补偿电流是决定有源电力滤波器补偿性能的一个重要方面。目前有源电力滤波器常用的电流控制方法有滞环电流控制、三角波调制控制、模糊控制、空间矢量调制控制、无差拍控制、滑模变结构控制、单周控制、预测控制等。本文在对实际样机进行实验的基础上,针对并联型有源电力滤波器,提出了一种更为先进,控制跟踪效果更为优越的模糊自适应PI控制的策略,并运用Matlab仿真软件对其进行了大量仿真。

图1 APF基本原理图
2 基于模糊自适应PI控制的SAPF
由于模糊逻辑控制有理想的动态特性,对过程参数的变化不敏感,具有很强的鲁棒性,能够克服非线性因素的影响,而自适应PI控制具有易实现、精度高的特点,因此将两者结合应用于有源电力滤波器,必将保证补偿电流信号实时准确地跟踪指令电流信号的变化。
(1)模糊自适应PI控制器的设计
为了满足实时控制需要,将操作人员的调整经验和技术知识总结为IF(条件)THEN(结果)形式的模糊规则,并把这些模糊规则及相关信息(如初始的PI参数)存入计算机中。根据APF的响应情况,计算出采样时刻电流与其给定量的偏差e及偏差的变化率ec,输入控制器,运用模糊推理进行模糊运算,即可得到该时刻的实现PI参数的最佳调整。模糊PI控制器主要由模糊化、模糊推理以及去模糊化组成。实际控制器设计框图如图2所示。
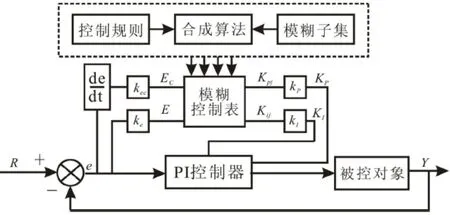
图2 模糊PI控制器框图
(2)基于模糊自适应PI控制的SAPF
将模糊自适应PI控制器应用于传统的有源电力滤波器,就构成了基于模糊自适应PI控制的SAPF。其原理图如图3所示。

图3 SAPF的模糊自适应PI控制原理
(3)电压电流跟踪控制电路的模糊PI控制的原理框图如图4、5所示

图4 SAPF电压的模糊PI控制原理框图

图5 SAPF跟踪电流的模糊PI控制原理框图
(4)模糊自适应PI控制策略的SAPF参数设计
一个性能优良的模糊控制器除了有一套行之有效的控制规则外,还必须合理选择控制器的初始参数值和量化因子。在有源电力滤波器中,影响模糊PI控制器的最重要的因素就是KP、KI的初始值,选择合适的参数可以使模糊PI控制器达到更好的控制效果。根据参数预整定的原则以及文献[26]对PI参数的设计过程的详细推导。最后可以把PI的参数设定在一个范围,如下式所示:

影响模糊PI控制器的另外的参数就是输入量和输出量的比例因子。仿真证明,ke增大,对KP´、KI´的调节死区变小,但是KP、KI调节精度提高,若取得过大,会使系统产生较大的超调,调节时间增大,而且较长时间的超调会使KI持续减小到负值,PI控制器的积分项的调节作用由原来的减小误差变为使误差加大,此时,若比例作用不强,会使超调继续加大,系统不能稳定工作。kec减小,KP´、KI´的调节作用加强,KP、KI调整速度加快,但若取得过小,容易造成积分饱和,使系统超调加大,影响系统稳定运行。
在实际仿真中,取KP的值为0.95,KI的值为1.5。设定误差E以及误差变化率EC的基本论域分别为[-80,+80],[-90,+90],输出控制量PI参数KP、KI的基本论域为[-50,+50]。由公式

可以得到模糊控制器的比例因子ke=6/80=0.075,kec=6/90=0.067,kp=50/6=8.33,ki=50/6=8.33。
3 基于模糊自适应PI控制策略的SAPF仿真
根据上述模糊自适应PI在有源电力滤波器中的控制原理,本节在此基础上利用Matlab/Simulink仿真工具箱搭建了SAPF控制策略的仿真模型。仿真图如图6所示。
(1)参数设置
上述仿真模型中各参数如下:系统相电压220V,系统线路阻抗0.3Ω+0.3mH,变流器开关频率16.2kHz,直流侧电容5000µF,整流负载直流侧电感80mH,电阻2Ω。
其中,模糊自适应PI控制器的仿真结构图如图7所示。

图6 基于模糊自适应PI控制策略的APF的系统仿真图

图7 模糊自适应PI控制的仿真结构
(2)电压环的仿真
SAPF在运行过程,若直流电压有大的波动,就可能会造成IGBT的开关时间紊乱,从而造成IGBT模块过流被烧坏。所以直流侧电压的稳定尤为重要。为了验证直流母线电压的模糊自适应PI控制方法的稳态与动态性能,在负载突然增加和APF系统启动两种情况下,分别采用模糊自适应PI控制方法与传统PI控制方法,在Matlab/Simulink中进行了APF直流母线电压控制的仿真实验。仿真波形如图8所示。

图8 SAPF运行中突加负载时的直流母线电压波形
从仿真图8中可以看到,单纯采用PI控制时,开始阶段的电压波动比较剧烈,对IGBT模块的冲击影响较大,而采用模糊自适应PI控制时,电压上升到稳态时的过程就比较平缓,减少了对IGBT模块的冲击,有利于实现电压环的平滑调节。
(3)电流环的仿真
电流环控制的好坏直接决定了补偿电流波形的效果。由于电流环直接作用于PWM波形的发生阶段,因此,电流的发生以及控制的稳定性尤为重要。
图9为负载电流突然增加时的仿真波形,在图9中,最上面是A相负载电流波形,中间的是采用模糊自适应PI控制方法得到指令电流以及补偿电流信号。最下面的为采用模糊自适应PI控制方法得到的补偿后的电流波形。
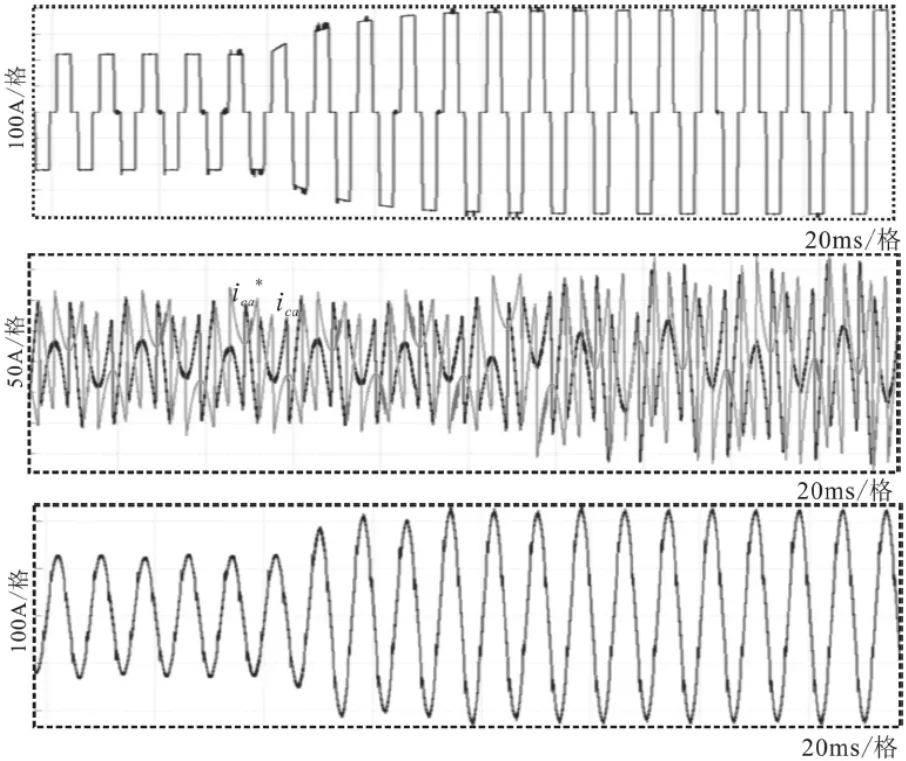
图9 采用模糊自适应PI控制的SAPF运行中突加负载时的电流波形
从图9的仿真结果可以看出,采用模糊自适应PI控制以后,指令电流与补偿电流的波形从跟踪效果上来看更加趋于平滑。而且在负载突然增加时,补偿后的电流波形也能实现平滑的调节,跟踪补偿效果比较良好,能够达到较为理想的波形。
(4)系统的稳态仿真
取定直流侧电压Udc为800V,连接电感L取值为0.68mH以后,本小节对系统的稳态性能进行了仿真。仿真波形如图10所示。
图10中,从上至下依次为A相负载电流和补偿后系统A相电流的波形、A相负载电流波形的THD以及补偿后A相系统电流波形的THD。从仿真效果可以看出,除在变流器换相处存在尖峰电流没有完全补偿外,系统电流整体已接近。而且从谐波含量上来分析,补偿后实际电流波形中的谐波含量已经大大的减少,都符合国家标准中所规定的允许值。
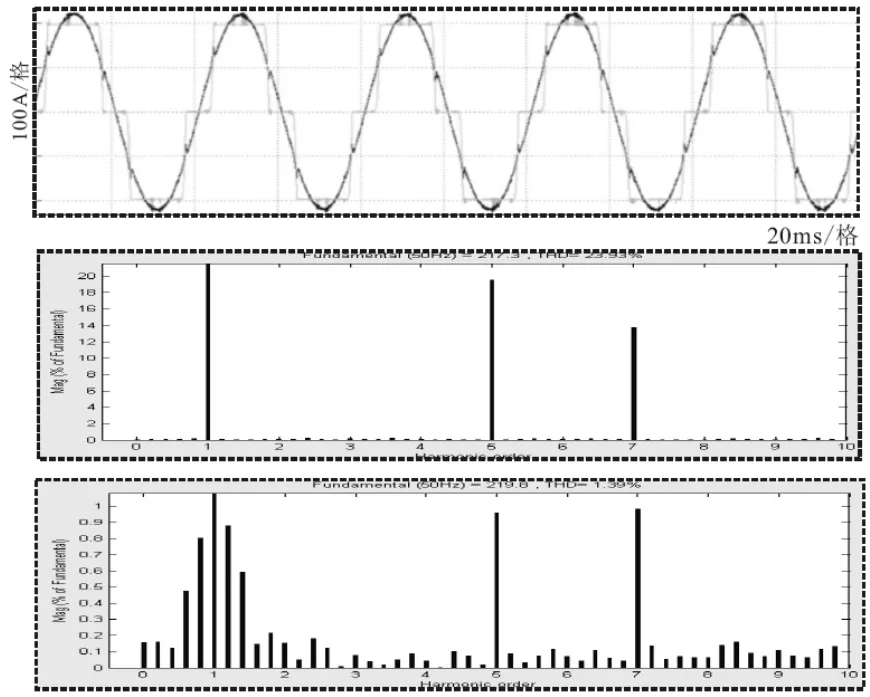
图10 系统稳定运行后的负载电流和系统电流波形以及谐波含量
4 结论
本文搭建了模糊自适应PI控制的SAPF仿真模型,并对各种情况下的波形进行了仿真,同时与普通PI控制进行了比较。仿真结果证明,采用模糊自适应PI对SAPF进行控制是可行的,是有效的。
[1] 吴竞昌.供电系统谐波[M].北京:中国电力出版社.1998.
[2] 姜齐荣,赵东元,陈建业.有一源电力滤波器—结构原理控制[M].第一版.北京:科学出版社,2005:28-35.
[3] 郭自勇.有源电力滤波器检测与控制技术的研究及应用[D].湖南大学博士论文,2007.
[4] 李刚,罗安,付青等.一种新型混合型有源滤波器的模糊PI控制[J].电力电子技术,2005(8).
[5] 赵涛,工群京,姜卫东等.基于模糊自校正PI的直流电动机PWM控制系统的仿真分析[J].电气工程,2004(11).
[6] 李秀娟,于力.基于Matlab模糊控制器设计和仿真[J].电子测量技术,2004(3).
[7] 张颖超,郭妹梅.MATLAB及其在模糊控制系统仿真中的应用[J].系统仿真学报,2001(11).
