基于刚柔耦合模型的月球着陆器动力学分析
2010-03-16逯运通宋顺广王春洁
逯运通 宋顺广 王春洁
(北京航空航天大学 虚拟现实技术与系统国家重点实验室,北京 100191)
曾福明
(中国空间技术研究院总体部,北京 100094)
基于刚柔耦合模型的月球着陆器动力学分析
逯运通 宋顺广 王春洁
(北京航空航天大学 虚拟现实技术与系统国家重点实验室,北京 100191)
曾福明
(中国空间技术研究院总体部,北京 100094)
基于刚柔耦合多体动力学理论,提出了一种基于三维实体造型、有限元分析与多体动力学分析的刚柔耦合动力学仿真分析方法;利用该方法建立了月球着陆器着陆动力学模型,分别在地球重力环境和月球重力环境(1/6地球重力环境)下,对某典型着陆工况下的着陆动力学进行了仿真分析,得到了着陆器着陆的缓冲性能分析结果,包括主支柱最大缓冲行程、左右辅助支柱最大缓冲行程、最大质心加速度响应;将仿真结果与试验结果相比较,验证了着陆器动力学模型的正确性以及仿真分析方法的有效性,为今后的着陆器缓冲试验提供了动力学模型和仿真分析方法.从能量角度对月球着陆器的着陆过程进行分析,弥补了缓冲试验难以进行能量分析的不足.
月球着陆器;刚柔耦合模型;动力学分析;缓冲试验
月球着陆器着陆缓冲机构的性能是否可靠直接影响着陆器能否实现月面的安全着陆,关系到整个飞行任务的成败.为了全面验证着陆缓冲机构设计的可行性、合理性与适应性,需要进行相应的缓冲试验.但是由于缓冲试验系统复杂且实施难度大,只能进行有限次数的模拟验证试验,而且通过大量试验来获得试验结果的成本太高,所以必须开展缓冲试验的动力学仿真分析.
着陆器的所有构件均具有柔性特性,但是如果完全按照柔性体特性来描述着陆器,仿真分析的复杂程度和工作量将大大增加.对于受力小、刚性大的构件,可以视为刚性体,而那些受力大、刚性小的构件,在仿真中必须视为柔性体,这样构建的模型既可以准确反映其自身的运动特性,又可以将仿真的工作量大大降低[1].因此在仿真分析中对月球着陆器采用刚柔耦合模型进行模拟仿真计算是非常必要的.
本文建立了缓冲试验着陆器的刚柔耦合动力学仿真模型,并分别在地球重力环境和月球重力环境下对某典型试验工况进行动力学分析,并把仿真结果与试验结果进行比较,为工程样机试验提供参考.
1 刚柔耦合模型的动力学理论基础
多体系统既存在构件大范围的刚体运动,又存在弹性变形,因而刚柔耦合系统动力学与多刚体系统动力学及结构有限元分析均有密切关系.刚体可以按多刚体系统动力学理论建立方程,柔性体可以用有限元法建立方程,将两者组集就可得到刚柔耦合的多体系统的动力学方程.
本文所讨论的刚柔耦合动力学模型基于第一类拉格朗日方程:
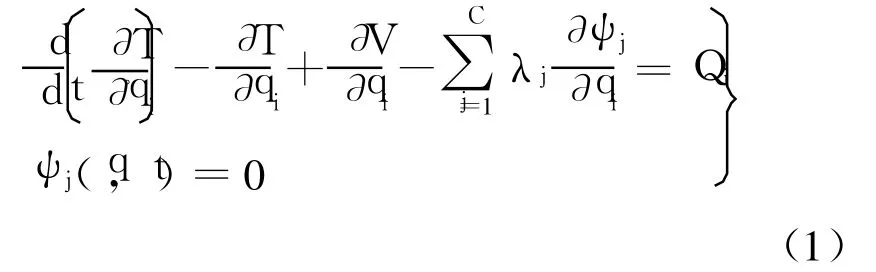
式中,ψj为约束方程;λj为拉格朗日乘子向量;qi为柔性体的广义坐标;T为构件的动能;V为柔性体的势能;Qi为施加的广义力.
对应于广义坐标的构件的动能为

式中,M为构件的质量矩阵.
在柔性体内,由变形引起的弹性力的虚功用柔性体的广义坐标表示为

式中,K为对应于柔性体广义坐标 q的刚度矩阵.
将式(2)和式(3)代入到式(1)得

式中,Kq为弹性力对应的广义力;QF为作用于柔性体上除变形引起的弹性力以外的全部主动力对应的广义力.
由式(4),令

式中,Qv称为与速度二次项有关的广义力.于是式(4)可以写为

构态中单个构件的动力学方程为

式中,i表示构件的编号.
任意多体系统中每一个构件的动力学方程的对应矩阵组装起来,并加以相应的约束方程,则用拉格朗日乘子法建立的刚柔耦合动力学方程为

式中,Cq为约束 C(q,t)=0的雅可比矩阵;λ为拉格朗日乘子向量;CTqλ为作用于柔性体上的广义约束力[2].
2 刚柔耦合模型动力学分析方法
多体动力学软件 Adams是利用上述拉格朗日动力学方程组求解动力学问题的软件工具,通过建立部件模型、施加约束和载荷就可快速的建立仿真模型并进行求解.三维建模软件 Pro/E可以方便的建立三维实体模型,为动力学分析提供刚体模型.为考虑柔性体变形对动力学分析的影响,可以利用有限元分析软件 Patran建立柔性部件有限元模型,经 Nastran计算获得模态中性文件,并利用模态叠加计算其变形响应[3].
本文提出了一种利用软件 Pro/E,Patran/Nastran及 Adams建立刚柔耦合动力学仿真模型的方法,搭建了刚柔耦合模型动力学分析的框架,开发软件之间的接口程序,可以快速高效地建立多体刚柔耦合模型,分析流程如图 1所示.

图1 刚柔耦合模型动力学分析流程
首先在 Pro/E环境下创建动力学分析模型中刚体构件的三维实体模型,并将此模型转换成Parasolid文件;然后在 Patran环境下创建动力学分析模型中柔体构件的有限元模型,提交软件Nastran进行分析,生成 mn f文件;最后将前面步骤生成的 Parasolid文件、mnf文件导入软件 Adams,建立动力学分析简化模型,进行动力学分析,生成分析结果.
该分析方法把柔性特征不明显的构件视为刚性体,把运动中柔性特征明显的构件按照柔性体处理,所建立的刚柔耦合模型既准确地反映其自身的运动特性,又可以降低仿真的复杂度.
3 着陆器缓冲试验动力学模型
3.1 着陆器着陆缓冲机构的工作原理
着陆缓冲机构是实现着陆器软着陆的关键机构,如图 2所示,它由主支柱、辅助支柱和足垫 3部分组成.在着陆器着陆时,足垫首先接触月面,推动主缓冲器的活塞杆沿活塞筒滑动,缓冲器产生的相对运动导致铝蜂窝吸能元件压缩变形,从而吸收冲击能量,达到缓冲的目的;当主缓冲器的横向作用载荷超过预定值时,两条辅助缓冲器可以提供拉压双向缓冲功能[4-5].
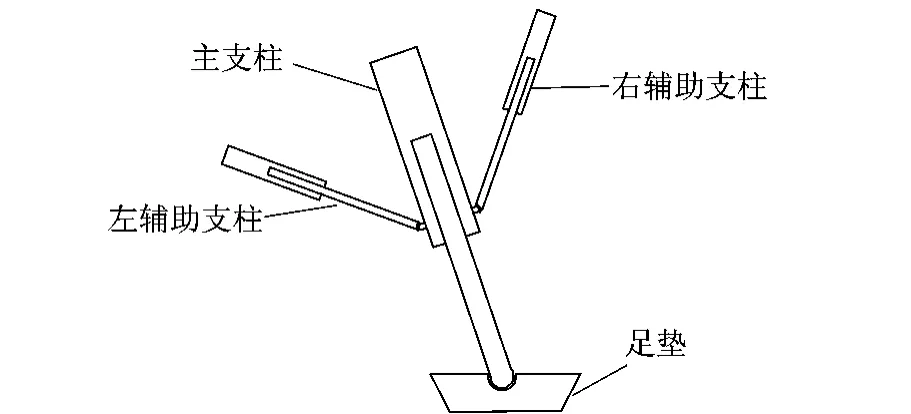
图2 着陆器着陆缓冲机构示意图
3.2 着陆器缓冲机构的力学模型
着陆器的着陆缓冲机构主要采用铝蜂窝压缩吸收着陆器的冲击能量.主、辅支柱轴向载荷方程可统一写为

式中,l为蜂窝的压缩行程;·l为蜂窝压缩行程的一阶导数,即压缩速度;Fh为蜂窝的压溃力,当·l <0时为 0,当·l>0时为蜂窝压缩特性曲线上的值;Ch为主辅筒之间的阻尼力;Fs为拉伸元件的拉伸力,当·l>0时为 0,当·l<0时为拉伸力曲线上的值[6].
足垫和地面的接触作用力包括法向接触力和切向摩擦力两部分.法向接触力采用碰撞方程:

式中,δ为接触变形;K为接触刚度;e为非线性指数;C为阻尼系数.K和 e的值可以通过土壤承载强度模型确定.
切向接触力模型采用库仑摩擦模型:

式中,μ为足垫与月面间的摩擦系数.
3.3 缓冲试验方法及试验模型的建立
图3所示为月球着陆器缓冲试验示意图.首先着陆器模型与平行四杆机构连接并由牵引绳拉至 A点;然后剪断牵引绳,着陆器模型沿弧形摆动至最低点 B,着陆器模型与平行四杆机构分离;着陆器模型沿抛物线运动至 C点,获得试验要求的初速度,与模拟月面发生碰撞.模拟月面为混凝土地面,根据试验需要可铺上硬木板、沙土和火山灰等以提供冲击表面不同的弹性模量和摩擦系数.着陆器上装有传感器以记录各方向加速度、姿态角及各缓冲器的缓冲行程.

图3 着陆器缓冲试验示意图
根据试验要求,利用前文介绍的建立刚柔耦合动力学仿真模型的方法,建立缓冲试验的着陆器模型,如图 4所示.

图4 缓冲试验的着陆器模型
4 仿真计算与试验结果
4.1 仿真试验流程
仿真试验的基本思路就是通过典型工况的试验结果对仿真模型进行验证,并完善仿真模型,然后应用动力学仿真模型代替试验,从而达到缩短试验周期,降低研制费用的目的.仿真试验流程如图 5所示.
4.2 仿真计算与试验结果
本论文以某典型试验工况为例进行仿真分析,试验工况参数如表 1所示.
仿真分析结果曲线如图 6~图 9所示.
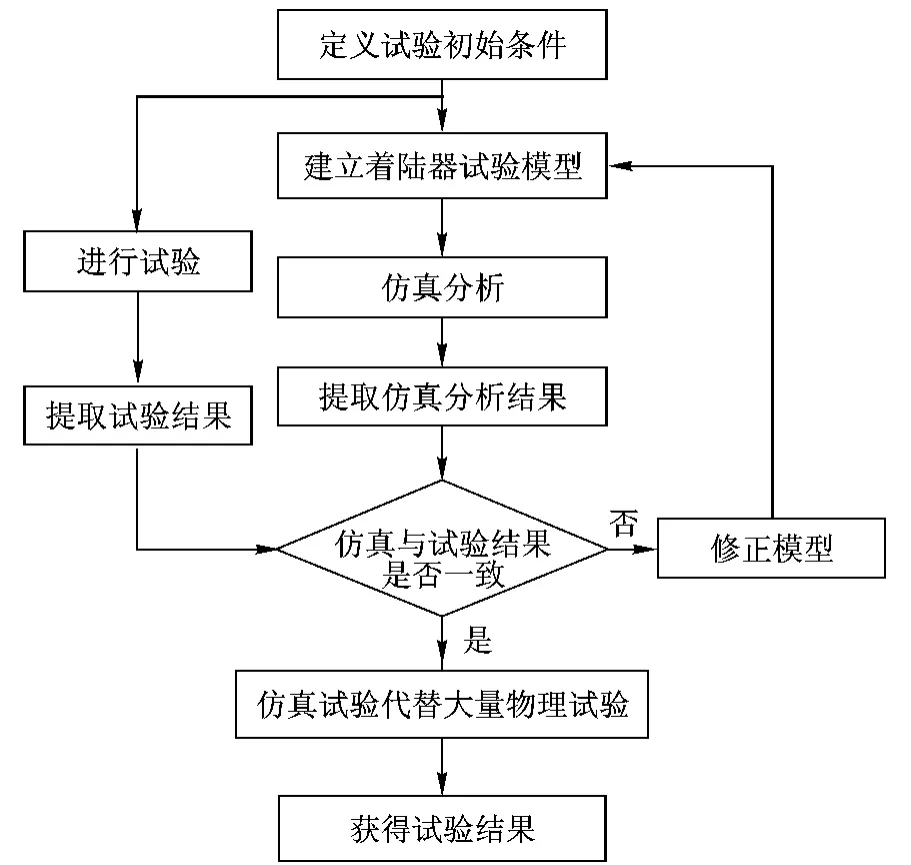
图5 仿真试验流程

表 1 试验工况参数
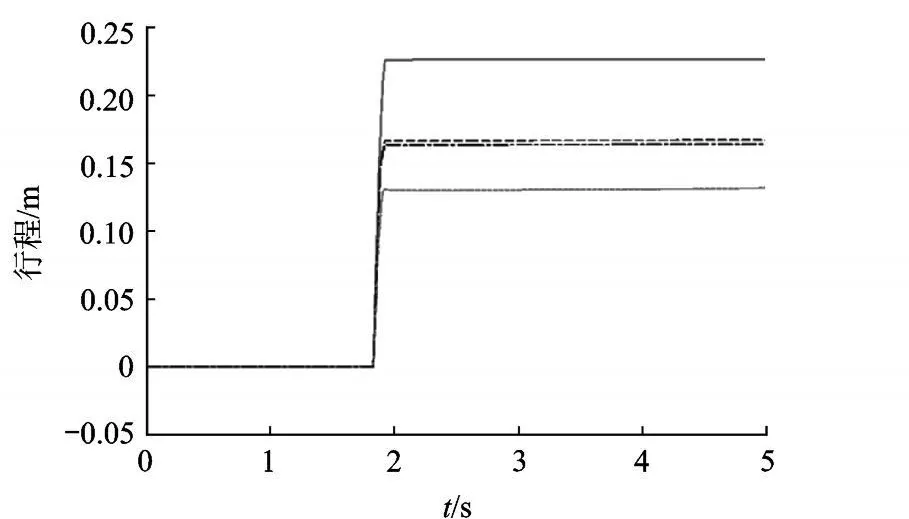
图6 主缓冲器缓冲行程曲线
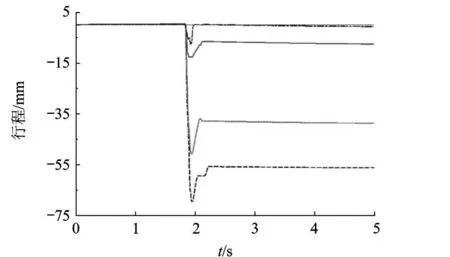
图7 左辅助缓冲器缓冲行程曲线
表 2所示为仿真结果与缓冲试验结果的比较.从试验结果与仿真结果对比可以看出,试验结果与仿真结果的误差小于 17%,表明计算模型能够较好地反映着陆器缓冲试验的模型.

图8 右辅助缓冲器缓冲行程曲线

图9 质心竖直加速度响应曲线
由于试验条件所限,缓冲试验很难对着陆器进行能量分析.本文建立的缓冲试验仿真动力学模型有效的弥补这点不足,分析了着陆器各着陆腿在试验过程中吸收的能量及着陆器在着陆过程中的势能变化,从而更全面地验证了着陆器性能,着陆腿吸收冲击能量的结果如表 3所示.
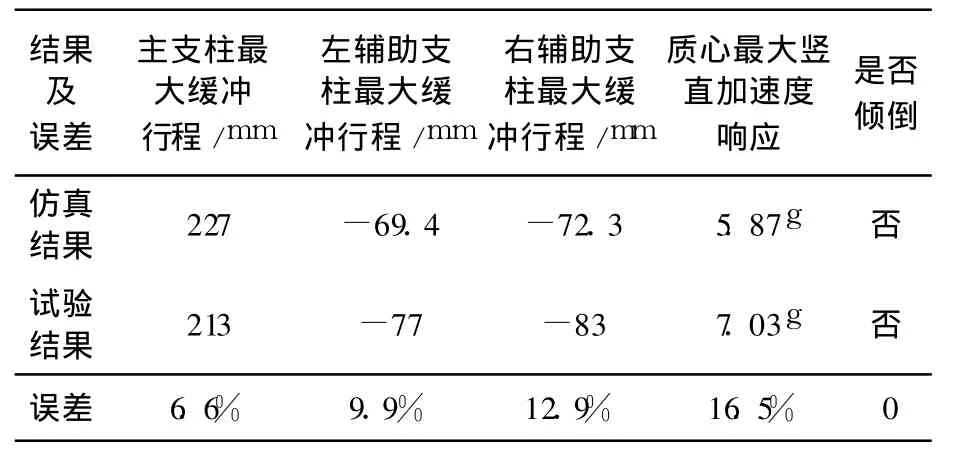
表 2 仿真结果与试验结果的比较

表 3 着陆腿吸收能量结果 J
着陆器在试验着陆过程中损失的能量全部来自于重力势能,如图 10可知,在着陆过程中着陆器损失能量 13887 J;由表 3可知,着陆腿共吸收能量 11646J,可知着陆器着陆过程损失能量的84%被着陆缓冲机构吸收,着陆器缓冲机构的缓冲性能良好.
为验证缓冲试验的合理性,比较着陆器缓冲试验与在月面着陆之间的差别,为试验提供参考,在月球重力环境下对着陆器进行着陆动力学分析,初始条件参数如表 1所示.不同重力环境下的仿真结果如表 4所示.
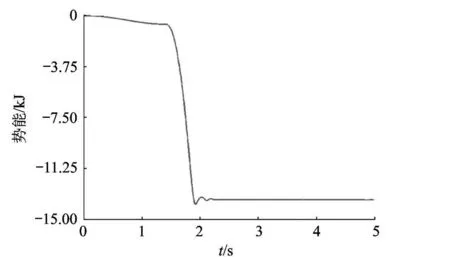
图10 着陆器势能变化曲线
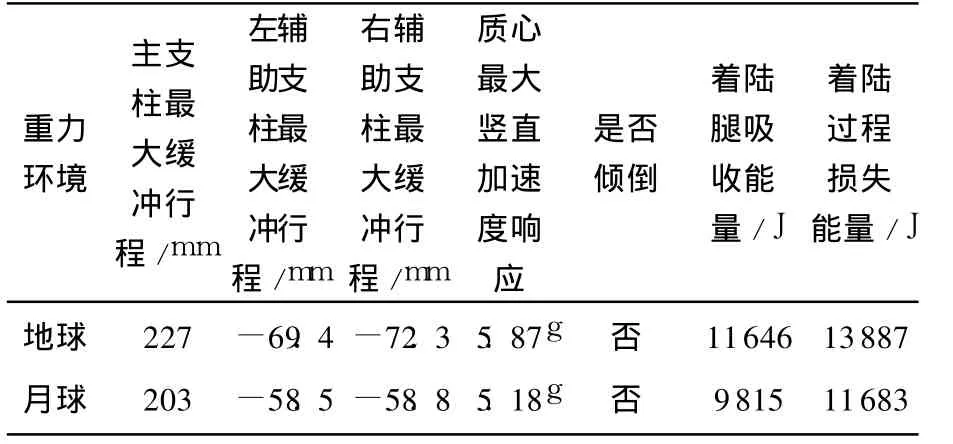
表 4 不同重力环境下动力学仿真结果的比较
由以上仿真分析结果可知,在表 1所示的典型试验工况下,地球重力环境下所得到的主支柱最大缓冲行程、左右辅助支柱最大缓冲行程、质心最大竖直加速度响应、着陆腿吸收能量、着陆过程损失能量均比在月球重力环境下得到的结果大,即相对于着陆器在月面的着陆,缓冲试验结果偏于保守.
着陆器在不同重力环境下着陆前速度相等,着陆后速度均为 0,即着陆器在着陆过程中动能损失相等;地球重力加速度远大于月球重力加速度,即着陆器重力势能的损失在地球重力环境下比在月球重力环境下大,所以地球重力环境下着陆器的能量损失比在月球重力环境下大.着陆器着陆过程中损失的能量主要被缓冲器吸收,故着陆器缓冲器在地球重力环境下比在月球重力环境下吸收的能量大,缓冲行程大.
5 结 论
本文利用刚柔耦合模型,对某典型试验工况下月球着陆器的着陆过程进行动力学仿真分析,获得缓冲机构主支柱最大缓冲行程、左右辅助支柱最大缓冲行程、质心最大竖直加速度响应、着陆腿吸收的能量及着陆过程着陆器损失的能量,为今后着陆器缓冲试验提供了一种有效的动力学模型和仿真分析方法.着陆器在着陆过程中损失的大部分能量被缓冲机构吸收,证明着陆器缓冲机构的缓冲性能良好;相对于着陆器在月面的着陆,缓冲试验的结果偏于保守.
References)
[1]王毅,吴立言,刘更.机械系统的刚-柔耦合模型建模方法研究[J].系统仿真学报,2007,19(20):4708-4710 Wang Yi,Wu Liyan,Liu Geng.Research of modeling flexiblerigid system based on mechanism[J].Journal of System Simulation,2007,19(20):4708-4710(in Chinese)
[2]金国光,贠今天,杨世明,等.柔性变胞机构动力学建模及仿真研究[J].华中科技大学学报:自然科学版,2008,36(11):76-79 Jin Guoguan,Yun Jintian,Yang Shiming,et al.Research on dynamic model and simulation of flexible metamorphic mechanism[J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2008,36(11):76-79(in Chinese)
[3]傅德彬,姜毅.基于刚柔耦合模型的发射装置动力学仿真分析[J].系统仿真学报,2009,21(6):1789-1796 Fu Debin,Jiang Yi.Dynamics simulation of guided missile launcher based on coupled rigid and flexible model[J].Journal of System Simulation,2009,21(6):1789-1796(in Chinese)
[4]杨建中,曾福明,张熇.月球探测器软着陆机构综述[C]//中国宇航学会深空探测技术专业委员会第一届学术会议论文集.北京:中国宇航学会,2005:135-139 Yang Jianzhong,Zeng Fuming,Zhang He.Review of landing gear system for the lunar lander[C]//1st Proceeding for Comm ittee of Deep Space Exploration Technology CSA(Chinese Society of Astronautics).Beijing:Chinese Society of Astronautics,2005:135-139(in Chinese)
[5]朱旺,杨建中.月球探测器软着陆机构着陆腿模型与仿真分析[J].宇航学报,2008,29(6):1723-1728 Zhu Wang,Yang Jianzhong.Modeling and simulation of landing leg for the lunar landing gear system[J].Journal of Astronautics,2008,29(6):1723-1728(in Chinese)
[6]Masahiro Nohmi,Akira Miyahara.Modeling for lunar lander by mechanical dynam ics software[R].AIAA-2005-6416,2005
(编 辑:文丽芳)
Dynamic analysis for lunar lander based on rigid-flexible coup led model
Lu Yuntong Song Shunguang Wang Chunjie
(State Key Laboratory of Virtual Reality Technology and Systems,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Zeng Fuming
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Based on the rigid-flexible coupled multibody dynamics theory,an analysis method involved three-dimensional solid modelling,finite element analysis and multi-body system dynamics analysis was proposed.With such a method,the landing dynamics model for a lunar lander was established and used to analyze the landing performance for a typical touchdown case in both Earth's gravity and Lunar's gravity(1/6 Earth's gravity)environments.The results include the max strut stroke in both the primary struts and secondary structs,the lunar lander mass center's max acceleration.The analysis results were contrasted with those from the shock testing,showing that the rigid-flexible coupled dynamics model has been correctly built and the analysis method is valid and efficient.The model and method developed can then be used for future evaluating the landing performance of the lunar lander.The landing performance of the dynamics model was analyzed in energy prospect,making up shortage of shock testing's failure of doing energy prospect.
lunar lander;rigid-flexible coupled model;dynamic analysis;shock testing
TP 391.9;V 47
A
1001-5965(2010)11-1348-05
2009-10-27
虚拟现实技术与系统国家重点实验室自主基金资助项目
逯运通(1985-),男,河北廊坊人,硕士生,yuntonglu@126.com.