适用于XRD的12 kW高频高压电源系统研究
2010-03-06郑宝华程德福修连存
郑宝华, 程德福, 修连存
(1.吉林大学仪器科学与电器工程学院,吉林长春130026;2.吉林化工学院,吉林吉林132022;3.南京地质矿产研究所,江苏南京210016)
X射线衍射仪高压电源是仪器重要组成部分,其指标直接影响仪器测量数据的稳定性及人身安全。X射线衍射仪高压电源分为工频高压电源和高频高压电源两种,工频高压电源由于体积大、笨重、不稳定,已基本被淘汰[1]。近年来,由于电子技术的发展,高频高压电源开始在X射线衍射仪中广泛应用,特别是在国外,X射线衍射仪高压电源几乎已经不再使用工频电源了,而且最大功率可以做到18 kW。在国内,X射线衍射仪高压电源仍然在使用工频电源,还没有研制出较大功率的高频高压电源。我们在成功研制3 kW高频高压电源的基础上,又研制出了12 kW高频高压电源,大幅度提高了电源功率的同时,在技术上也缩短了与国际上的差距,对提高我国仪器技术水平具有深远意义。
1 高频高压电源的工作原理
高频高压电源共分六大模块,它们是电源整流模块、高压控制模块、电流控制模块、高压驱动模块、高压发生模块和电源保护模块。六个模块既相互关联,又各自一体。由于该电源功率高,需要的部件大多是大功率,绝缘散热也是设计的一项重要内容[2]。图1为设计原理图,图中列出了各个模块以及相互关系。

图112 kW高频高压电源原理框图
380 V/50 Hz的交流输入电源经电网滤波、整流得到直流电压。由于刚上电时滤波电容使输入短路,导致电路损坏,需经过数秒的延时对电容充电,对电路进行保护。然后经过功率因数校正电路输出400 V电压,再把400 V电压加到高压驱动电路上,最后通过高压发生器输出-60 kV的高压。功率因数校正电路是使电源输入电流实现正弦化,并保持与输入电压同相,使功率因数接近于1。高压发生电路就是将驱动电路的信号通过变频升压处理,得到所需的高压。控制保护电路包括电压控制保护电路和灯丝电流控制保护电路。电压控制保护电路从高压发生器输出电路中做电压采样,将其反馈信息输入到控制电路,通过反馈信息来调节控制电路输出的脉冲宽度,从而调节输出电压,使输出电压保持稳定,减小纹波。灯丝电流控制保护电路的工作原理也是一样,从高压发生器输出电路中做电流采样,将其反馈信息输入到控制电路,控制使其电流保持稳定,从而使灯丝亮度保持稳定。另外,在电路中还输出电路中所需要的辅助电压有:+36、+15、±12、+5 V。
2 电源主电路的设计
电源的主电路部分包括:整流滤波电路、延时保护电路和功率因数校正电路三部分[3]。电源主电路负责将市电经整流滤波电路及延时保护电路变成直流,经功率因数校正,电路输出为约400 V的直流电压。
(1)整流滤波
电网提供的交流电为220 V或380 V(本设计中采用380 V/50 Hz),考虑电源功率比较大,本设计中采用桥式整流、电容滤波。桥式整流电路的优点是输出电压高,纹波电压较小,管子所承受的最大反向电压较低,同时因电源变压器在正、负半周内都有电流供给负载,电源变压器得到了充分的利用,效率较高。
整流后,对电流进行电容滤波。由于用来滤波的电容值有限,滤波后的电流还有较大的波动性,功率因数也比较低。具有较大波动性的输出电流须经后面的功率因数校正,电路进行功率因数校正,来提高电源的整体效率。
(2)延时保护
由于滤波电路中的滤波电容的存在,使开机时造成电源瞬间短路,因此,需要进行延时保护。整流电路中串联一个约20Ω电阻,在开机时延时电路控制可控硅截至,由电阻向滤波电容充电,充电完成后,由延时电路驱动使可控硅导通,短路掉20Ω电阻使电源进入正常工作状态。延时电路采用555定时器完成,延时时间约为4 s。
(3)功率因数校正电路
功率因数校正方法可分为无源功率因数校正和有源功率因数校正。无源功率因数校正结构简单,便于实现,但校正后的功率因数不高。有源功率因数校正是在整流器与滤波器之间插入一个功率变换器,将输入电流校正成为与输入电压同相位且不失真的正弦波,从而提高功率因数。本设计采用有源校正(APFC)。有源功率因数校正适用于中大功率电源(1~18 kW)且适应宽输入电压,磁性元件小,省略了庞大的原输入级滤波器。
高功率因数校正电路设计的基本工作原理方框图见图2。由储能电感L、高频大功率开关三极管S、单向二极管D和滤波电容C共同组成Boost(即升压式)变换器电路。其中开关管S受恒定高频(40 kHz或50 kHz) 脉宽调制(PWM)开关信号的控制。使它及时跟随电网输入电压的变化,实现系统的高功率因数值(达0.99)。

图2 功率因数校正电路工作原理方框图
设计中采用了UC3854芯片。经测试功率因数值PF≥0.99,低频谐波失真THD≤8%~10%,电源效率可达90%以上,输出电压VB稳定(升至400 V左右)。
3 高压发生器电路的设计
(1)驱动电路
电力电子器件的驱动电路是电力电子主电路与控制电路之间的接口,是电力电子装置的重要环节,对整个装置的性能有很大的影响[4]。驱动电路的基本任务,就是将信息电子电路传来的信号按照其控制目标的要求,转换为加在电力电子器件控制端可以使其开通或关断的信号。对半控型器件只需提供开通控制信号,对全控型器件则既要提供开通控制信号,又要提供关断控制信号,以保证器件按要求导通或关断。驱动电路还要提供控制电路与主电路之间的电气隔离环节。一般采用光隔离或磁隔离,光隔离一般采用光耦合器。本设计的驱动电路主要构成如图3所示。

图3 驱动电路示意图
按照驱动电路加在电力电子器件控制端和公共端之间信号的性质,可以将电力电子器件分为电流驱动型和电压驱动型两类。晶闸管虽然属于电流驱动型器件,但是它是半控型器件,晶闸管的驱动电路常称为触发电路。GTO和GTR属于电流驱动型器件,电力MOSFET和IGBT是电压驱动型器件。
(2)升压电路
一般的高压电源均采用变压器升压,变压器升压容易使电源设备体积变大。为了使设备小型化,在升压变压器输出后采用了倍压电路二次升压,如图4所示。这样,可以尽量减小变压器的体积,提高效率。倍压整流不仅可以将交流电转换成直流电(整流),并且不需要再增加滤波电容[5]。而且能够在一定的电压之下,得到高出若干倍的直流电压(倍压)。只要倍压电路中使用电容的总体积不是很大,就可以减小整个电源设备的体积[6]。

图4 倍压电路
4 控制保护电路的设计
控制保护电路是电源中不可缺少的电路,它使电源输出更加稳定,而且在异常情况下,使电源电路免受损坏,增强了电路的自我保护能力。控制保护电路设计的好坏是决定电源工作性能优良与否的重要因素。
本设计的控制与保护电路示意图如图5所示,控制保护电路主要是通过TL494来控制电路的脉冲宽度,实现过压保护、过流保护和水流保护,最终输出高频脉冲。
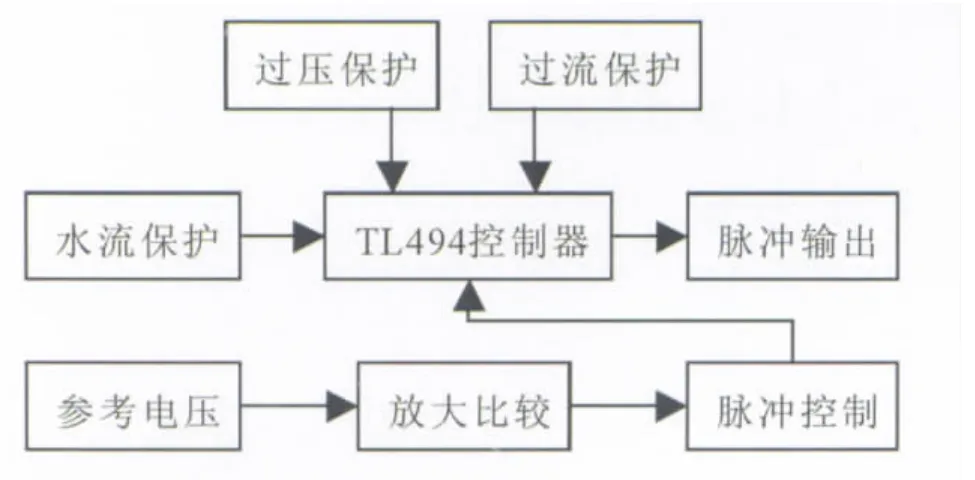
图5 控制与保护电路原理图
高频高压变压器开关电源的控制方式,最常用的是脉冲宽度调制(PWM)方式[7]。PWM集成控制器通常分为电压型控制器和电流型控制器两种。电压型控制器只有电压反馈控制,可满足稳定输出电压的要求,电流型控制器增加了电流反馈控制,除了稳定输出电压外,还有以下优点:(1)开关管的电流达到给定值时,开关管自动关断;(2)除工频电压经整流后的纹波电压外,在开关电源输出端300 Hz以下的纹波电压很低,因此可选用较小的滤波电容;(3)具有内在的均流能力;(4)具有快速的负载动态响应。
5 测试结果
测量条件:X射线衍射仪真空小于10-5Pa,高压开机半小时:
(1)电压、电流稳定度测试
将电压采样和电流采样信号用导线引出,连接万用表,电压调到40 kV,电流调到70 mA,每1~2 min测量一次,共测量30个点(40 m in),记录数据。得到结论为电压稳定度0.011%,电流稳定度为0.016%。
(2)电压、电流调节测试
电压可在0~45 kV范围调节,电流可在0~150 mA范围调节,工作正常。
(3)断水保护测试
电压调至20 kV,电流调至10 mA,当断开水连接信号时启动保护测试,电压和电流自动归零。
(4)功率保护测试
功率设置到1、2 kW,调节高压和电流,当升到超过功率时,电压和电流自动归零。
(5)样品测量
所用试样SiO2标样,电压40 kV,电流70mA,起始角15°,终止角80°,测试步长0.02°,每步积分时间0.1 s。测试谱图如图6所示。

图6 测试谱图
6 结论
完成了X射线衍射仪大功率高压电源的设计,提高了高压电源的稳定度,减轻了质量,缩小了体积,增加了电源转换效率。采用PWM脉冲调宽技术,使负载在发生变化时迅速恢复到所设定的电压,增强了电压稳定度,提高了电压精度。采用40 kHz高频脉冲,减小了纹波。采用变压器驱动加倍压电路,提高了转换效率,降低了次级电压。采用全波倍频整流,降低了元器件电容的耐压要求,缩小了元器件体积。高灵敏度保护,避免对仪器转靶伤害。
[1] 刘粤惠,刘平安.X射线衍射分析原理与应用[M].北京:化学工业出版社,2003.
[2] 张占松,蔡宜三.开关电源的原理与设计[M].北京:电子工业出版社,2004.
[3] 陈坚.电力电子学[M].北京:机械工业出版社,2002.
[4] 俞海珍,冯浩.电磁兼容技术及其在PCB设计中的应用[J].电子机械工程,2004,20:2.
[5] 周凌宏,贺志强.便携式高频X线机的研制[J].医疗卫生装备,2004(7):19-21.
[6] CARLOS A,MUNO Z,BARBI I.A new high-power-factor three phase ac-dc converter:Analysis,design,and experimentation[J].IEEE Transactions On Power Electronics,1999,14(2):1.
[7] AHMAD S U,KOHLID R.Design and analysis of pulse-w idth modulated closed-loop DC drive torsional system using parameter plane technique[J].Electric Machines And Power Systems,1999,27(8):8.
