基于DSP的动调陀螺寻北导航系统的设计及实现
2010-03-06郑文成任勤勇周学文
郑文成 颜 俐 任勤勇 汪 辉 周学文
中国舰船研究设计中心,湖北武汉 430064
基于DSP的动调陀螺寻北导航系统的设计及实现
郑文成 颜 俐 任勤勇 汪 辉 周学文
中国舰船研究设计中心,湖北武汉 430064
研究的寻北导航系统主要以动力调谐陀螺为敏感设备,创新地采用TMS320VC5402芯片作为主处理器构建寻北仪的计算机系统,取代通常构建系统时所用的PC机或单片机,并以CPLD为主要控制辅助组件设计并调试数据的采集、处理、输出、信息通信等硬件电路和相关软件,充分利用DSP快速运算、信息存储、逻辑判断和数据处理等能力完成多种控制任务,在实现寻北功能的同时又使系统的精度、控制和解算能力得到提升。
寻北导航系统;硬件;设计
1 引言
寻北技术是惯性技术领域的重要组成部分,是现代化战争中确保武器系统快速、精确打击目标的重要保障技术之一。本文所研究的寻北装置主要以动力调谐陀螺为敏感设备,利用陀螺敏感地球自转角速度分量,并由此计算出载体纵轴向与真北的夹角。本文设计的硬件电路根据两个加速度计和陀螺的输出经过A/D转换,计算出载体的姿态角,从而实施寻北。
随着惯性技术的发展,以陀螺仪为主要元件的寻北仪的精度、反应速度都在不断提高,PC机和单片机的运算速度、字长和量化误差等方面的缺陷影响了其在高精度控制系统中的应用效果,从而就对构成陀螺寻北系统的处理功能单元提出了更高的要求。16位字长的高速DSP芯片的出现极大地缓解了这个问题。在系统中采用基于DSP的数字控制系统取代PC机和单片机处理系统,可以充分利用DSP快速的运算、信息存储、逻辑判断和数据处理等能力完成多种控制任务,从而使控制能力达到一个新的水平。DSP在动调陀螺寻北系统中的应用研究对进一步提高寻北系统的性能是很有意义的。
2 动调陀螺寻北系统原理及组成
地球以恒定的自转角速度ωe绕地轴旋转。对于地球上纬度为φ的某点,在该点地球自转的角速率可分解为两个分量,水平分量ωe1=ωecosφ沿地球经线指向真北,垂直分量ωe2=ωesinφ沿地球垂线垂直向上,如图1所示。可见,利用惯性技术测量或敏感地球自转角速度的水平分量,即可以获得地球上被测点的北向信息,这就是陀螺寻北仪的基本原理[1]。

本系统用的是陀螺寻北方法中的捷联式寻北方法,这种寻北方式通常选用动力调谐陀螺作为核心惯性器件,整个系统主要由台体、陀螺、加速度计、力矩电机和旋转变压器、测控回路及计算机等组成,系统的核心部分为是两个加速度计和一个动力调谐陀螺仪。陀螺寻北仪是利用陀螺敏感地球自转角速度分量,并由此计算出载体纵轴向与真北的夹角,陀螺敏感轴一个指东为水平轴,提供北向水平基准;一个指天为方位轴,提供方位基准。加速度计用来测量横向及纵向的倾斜角度,作为寻北时的倾斜误差补偿。动力调谐陀螺寻北由于采样方式和解算方式的不同,所采用的寻北算法也有所不同,主要可以分为单位置寻北法、二位置寻北法、四位置寻北法[2]。
3 系统硬件电路的设计与实现
3.1 系统硬件结构设计方案
系统硬件电路的设计是本文研究的重点,由于寻北系统需要同时满足解算大量的数据和实现控制功能的两个方面的要求,包括采集惯性传感器的输出信号、模拟开关的切换、功能按键的实现、输出导航参数、与主控设备交换信息等;另外是数据处理与解算,包括惯性传感器误差补偿、姿态计算、在线校正、滤波等。也就是说,寻北系统是一个集运算和控制于一体的系统,它不仅需要有较高的计算速度和精度,还必须拥有较高的控制能力。
寻北系统通常都采用以PC机或单片机作为数据处理器来完成系统的数据处理任务和与外界的交互控制任务。而本系统采用定点DSP TMS320VC5402作为数据处理器系统的方案来实现动调陀螺寻北的任务[3]。为了完成上述的功能,本DSP系统在硬件结构上应具备:CPLD逻辑电路、电源模块、复位电路、时钟电路、A/D转换模块、串口通信模块、转台控制电路、片外RAM、片外ROM、PLL和JTAG接口等。
在系统方案设计中,DSP芯片用来执行系统中有关数字信号处理的高速运算以及一些控制功能,将分别从加速度计、2个二自由度陀螺中读出数据,存储在相应的存储空间,调用寻北解算程序解算所读入的数据,最后通过串行口发送给PC机显示经过计算的结果[4]。CPLD对其完成的功能进行分类,细化分解成多个小的功能模块,以图形编辑的方式搭建组合,完成对电路的译码和对各个芯片的控制功能。它在系统中完成了对片外ROM、RAM及串行口的控制和译码,完成了对A/D的控制逻辑,并且在A/D和DSP之间起到了总线驱动的作用。其系统结构图如图2所示。

图2 系统结构框图
3.2 A/D 转换和数据采样
A/D转换器是模拟量输入通道的核心部件,它是把模拟量转换成数字量的装置。采样和量化是通过A/D转换器来实现的。本系统采用AD976采样陀螺、加速度计及各种检测信号等[5]。
本数据采集电路是采用 AD976、CPLD和TMS320VC5402采样陀螺、加速度计及各种检测信号等。系统数据采集方框图如图3所示。

模数转换电路主要组成部分为AD转换芯片AD976,它的前端为运放LF411。多路模拟开关的输出,经过运放输出到ADC芯片上。转换后的数据通过CPLD并行输出到DSP,而AD976所需要的控制信号也是由CPLD发出的。
3.3 数据采集前端设计
旋转平台的角度是由旋转变压器提供的,旋转变压器是由粗精两组线圈组成。设定粗精比n=1/16,要确定真正的机械角,还要进行粗精组合。正余弦旋转变压器包括转子和定子部分。定子一个绕组产生一个具有参考频率的电压,其幅值正比于轴角的正弦,另一个绕组产生一个幅值正比于轴角余弦的电压。

式中,θ为转子相对于定子的转角。由公式可看出输出电压分别与转子转角成正弦和余弦的关系,其输出电压波形如图4所示。系统所采用的激磁信号频率为400 Hz,为了得到角度信号,采用峰值采样电路,电路图见图5。激磁信号经电路移相90°后,经过比较器产生方波信号。电路输出波形如图6所示,其中Va为移相激磁电压波形,Vb为移相后的波形,Vc为经过比较器后的输出波形。方波信号和计算机发出的100 Hz的信号经过CPLD译码电路得到100 Hz左右的采样保持信号,用来控制采样保持器工作。
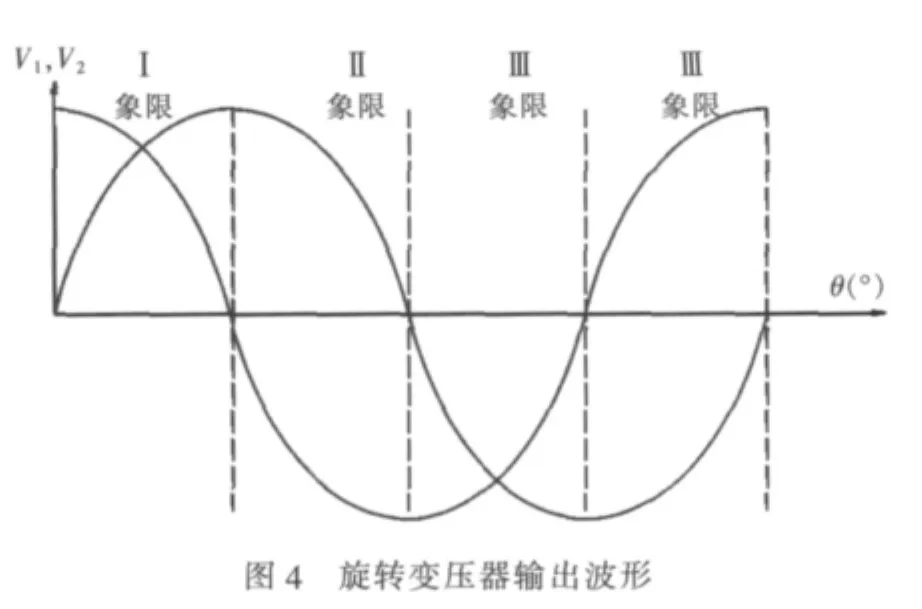
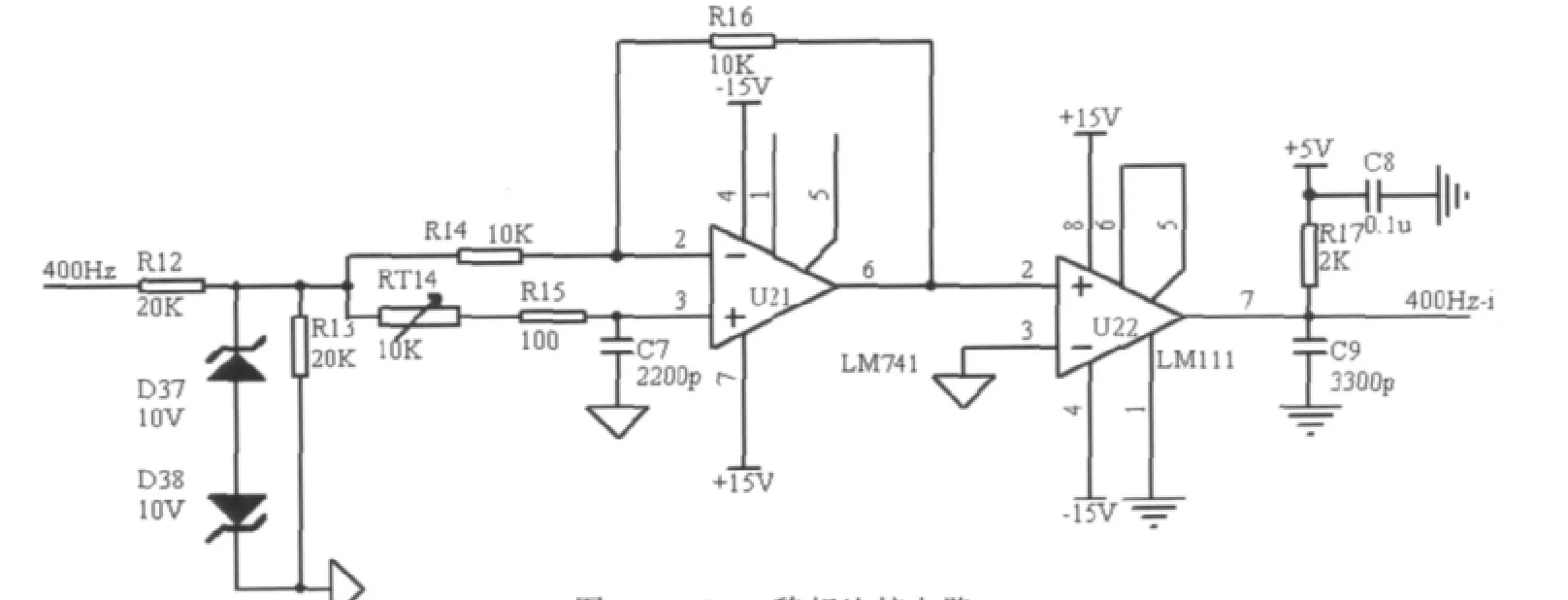
图5 400 Hz 移相比较电路
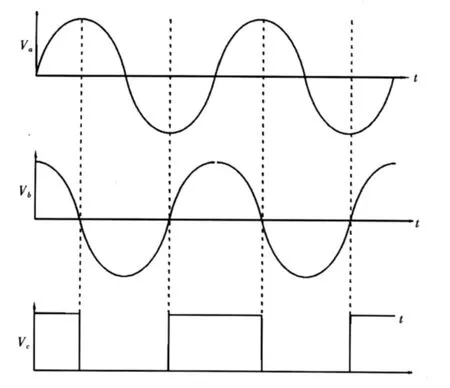
图6 电路输出波形
除旋转变压器信号外,计算机系统还需采样加速度计信号、陀螺力反馈信号、温度信号和用来检测转台回路是否正常的陀螺信号等。这些信号是接近直流缓变信号,所以未采用采样保持器,而仅采用稳压二极管限幅电路。
3.4 串行通信电路的设计
在本系统中,串行通信要完成的主要功能就是程序运行前实现控制命令从主机到DSP系统的传送,在得到控制输出后实现运算结果从DSP系统到主控机的传送。由于串行通信是按位传输的,而DSP的数据是并行传输的,因此就必须进行并串转换。在设计中用了异步串行芯片16C2550来实现串行口扩展,将DSP的并行数据传输转换成串行数据传输。对串行通信的控制也就主要是通过DSP芯片对串口芯片的控制来实现的。
系统的串行通信电路主要由有两个芯片完成,即上面所介绍的异步串行芯片16C2550和电压转换芯片MAX232。DSP通过DART芯片的8位宽的数据线作为串行传输的接口进行数据的传输(图7)。对串行传输方式的控制和参数的设定是通过DSP的初始化程序对DART芯片的寄存器的配置来实现的。其中的三位数据线A0,A1,A2是DSP通过CPLD译码,对芯片内的寄存器进行寻址。在系统上电后,需要对16C2550的各个内部寄存器进行初始化,使其以预定的方式正常工作,如各种中断的使能与屏蔽、数据传输波特率的设定、内部FIFO的深度、是否加入校位及其类型等。在本系统中波特率为9600,偶校验。
16C2550不仅简化DSP串行通信的接口,实现了灵活高速的串口通信,同时由于它是3.3 V的供电电压,与DSP的I/O电压兼容,从而避免了总线驱动的设计,简化了电路。
4 系统的软件设计
4.1 DSP混合编程中的资源配置
C编译器对C语言程序编译后生成若干个可以进行重新定位的代码和数据块,这些块可以以不同的方式分配到存储器以符合不同系统配置的需要。这些块分为两种类型,一种是已初始化块,另一种是未初始化块。

图7 16C2550 芯片接口
已初始化块主要包括数据表和可执行代码。C 编译器共创建.text,.cinit,.const和.switch 4 个已初始化块。未初始化块包括.bss,.stack 和.sysmem[6]。一般情况下,.text、.cinit和.const, 连同汇编语言中的.data块可链入到系统的ROM或RAM中,而.bss,.stack 和.sysmem 块则应链入 RAM 中。
4.2 BootLoader 程序设计
BootLoader是开发DSP应用系统必须做的最后一步工作。本系统为了增加软件下载的灵活性,将EEPROM等存储器放置到片外,增加了一片FLASH来代替;DSP的内部固化了一个Boot的程序,在 DSP 上电硬复位后(MP/MC=0),DSP 自动执行这个BOOT程序,将外部FLASH的程序读入DSP内部告诉RAM程序区中。DSP上电后自动将固化在FLASH中的程序读入到DSP的片上RAM或片外RAM映射成的存储区间的一个过程[7]。
在本系统中,当DSP从上电复位到进入工作状态前一瞬间的这个阶段称为Boot阶段。对于TMS320VC5402芯片来说,内部ROM空间是有限的,故ROM中固化了一些程序和查找表,当TMS320VC5402上电复位后,程序指针自动指向ROM中的一个称为BootLoader的小程序,这个程序会根据环境选用相应的BootLoader方法,将外部FLASH中的程序搬移到TMS320VC5402内部的RAM程序中,并将程序指针移到执行程序的第一行处.对于ROM来说,我们一般是无法改变的,ROM的地址是从F000h~FFFFh,具体内容如表1所示。

表1TMS320VC5402片上ROM内容
在上电复位时,如果引脚MP/MC为低电平,则程序从片内ROM的FF80h处开始执行程序。在这里会有一条跳转指令,转向ROM中的加载程序。这个程序在加载前先初始化CPU的状态寄存器和存储器映像片内的外设控制寄存器。这时,全局禁止中断使能 (INTM=1), 内部 DARAM和SRAM均映射到程序或数据存储空间(OVLY=1)。对全部的程序空间和数据空间都设为7个等待状态,以便最大可能地在从外部转移程序时对慢速器件兼容。
5 结束语
本文针对现代寻北导航系统的需求,在硬件及相应软件方面努力提高系统的各种性能指标。通过采用DSP信号处理芯片搭建处理系统大大提高了寻北系统的控制能力和解算功能,加快了信号处理的速度,同时又降低了系统的功耗,减小了系统的体积等,满足当代作战系统的指标需求。相信随着数字信号处理技术的发展和惯性仪表精度的提高,DSP在导航领域将会得到越来越广泛的应用。
[1]李嵘,白洁雁.全姿态动调陀螺定北仪原理与实现:导航与控制[M].北京:国防工业出版社,2002.
[2]戴明桢,周建江.TMS320C54x DSP结构、原理及应用[M].北京:北京航空航天大学出版社,2001.
[3]张勇,曾炽祥,周好斌,陈滨.TMS320C5000系列DSP汇编语言程序设计[M].西安:西安电子科技大学出版社,2004.
[4]邵欣,周德新.DSP在陀螺寻北仪中的应用[J].中国民航学院学报,2006(24):4-5.
[5]谢慕君,谭旭光,王志乾.基于动调陀螺的多位置寻北仪的转位误差分析[J].光电工程,2008(35)11:4-12.
[6]柯健.TMS320VC5402系统的Flash存储器并行自举与实现[J].电子工程师,2004(30)11:59-62.
[7]彭海兰,张翌晖,张承学.高精度模数转换器AD976/AD976A 及其应用[J].电子世界,2003(3):59-62.
Design and Implementation of Navigation System of DTG North Seeker Based on DSP
Zheng Wen-cheng Yan LiRen Qin-yong Wang HuiZhou Xue-wen
China Ship Development and Design Center,Wuhan 430064,China
The north-seeking navigation devices were mainly equipped with DTG as sensitive equipment and innovated in the use of DSP 5402 as the main processor to construct the computer platform of the north seeker instead of PC processor or single chip which were used to construct the system.And the CPLD displayed as the main assistant element in charge of control,and debugged the hardware and software consisting of data collection, processing, output and the communication.Achieving multi-task of controlling by utilizing the ability of fast operation, information storage, logical judgment and data processing of DSP and so on.It realizes the goal of north-seeking and advances the ability of precision controlling and operation in the system at the same time.
navigation system of north-seeker; hardware; design
U666.1
A
1673-3185(2010)01-76-05
2009 - 11 - 08
郑文成(1980 - ) ,男,硕士。研究方向:观通导航总体设计。E-mail:zhengwencheng0610@ 163. com
颜俐(1968 - ) ,女,高级工程师。研究方向:观通导航总体设计
