眼科超声测量仪检测方法的探讨
2010-02-06国家食品药品监督管理局湖北医疗器械质量监督检测中心武汉430077
国家食品药品监督管理局湖北医疗器械质量监督检测中心(武汉 430077)
超声诊断技术是目前眼科诊断应用最为广泛的手段,应用包括:在术前予以定性、定位和诊断,判断异物的有无、大小、形状、性质(囊性、实质性、脉管性、浸润性)、位置、范围以及正常组织的关系,眼睛损伤的检查和诊断,眼轴长度测量等。眼科超声测量仪主要执行的行业标准是YY0107-2005《眼科A 型超声测量仪》,在医学上的适用范围包括眼科角膜厚度和眼轴长度的测量,有部分眼科超声测量仪采用B 超技术检查眼体结构状态。我们对眼科超声测量仪测试中的一些问题进行了分析,并由此得到一点体会。
1 眼轴长度测量
眼轴长度测量主要应用A 型扫查技术。A 型扫查是一种幅度调制的显示法,根据声波的时间与振幅的关系,探测声波的回波情况,其定位准确性较高。A超扫查很适用于静止的、简单解剖结构的扫查和线性测量,特别在生物结构的线性测量中有很高的精度,广泛用于眼睛结构尺寸的测量(眼体结构见图1)。眼用A超是将探头置于眼前,声束向前传播,每遇一个界面发生一次反射,回声按返回时间以波峰形式排列在基线上,以波峰的高度表示回声强度,回声愈强,波峰愈高。由于轴向分辨力高,可显示前房深度、晶体厚度、玻璃体腔长度和眼轴长度。对于不同类型的眼球,A超一般具有对应的人工晶体计算公式,当测量眼轴和角膜曲率后,可选择人工晶体计算公式得出所需的人工晶体的精确度数。
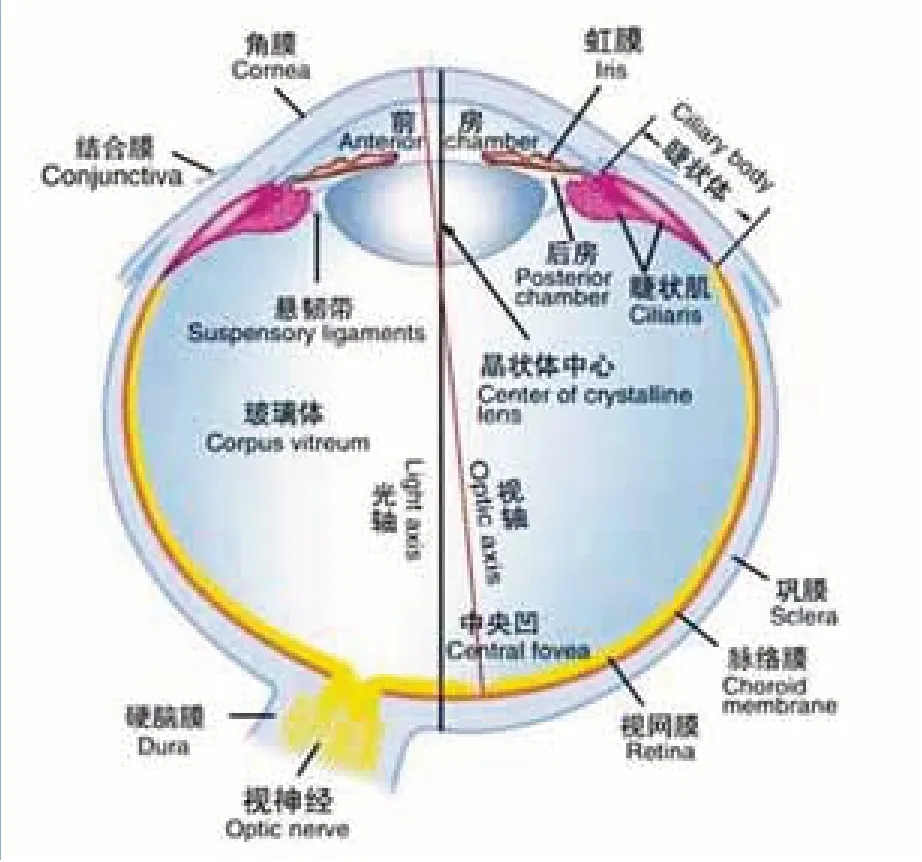
图1 眼体结构
测试眼轴长度测量范围及误差我们使用的阶梯试块包括了3 个反射面,分别模拟前房、晶体及玻璃体3 段距离.超声波通过各组织的时间,然后乘以超声波在各组织中前进的速度,得到各组织的厚度,厚度之和为眼轴的长度。测试眼轴长度测量范围时,我们将眼科仪器设置为检查无晶体模式,调节A 超探头与载玻片垂直,在探头端面与载玻片接触后将百分表清零,然后使探头提升的距离分别达到测量值的上、下限,观察测量仪显示的反射体回波,应符合规定要求。在测试时为了使声束能够准确地对准测试模块并且微调探头与测试模块的距离,夹具固定在具有精密调节功能的三维坐标系统上。眼轴长度误差测量方法先以已计量检定的通用量具测量出阶梯靶上平面与第三阶梯之间的高度h,调节A 超探头与阶梯靶平面目测垂直,探头端面轻轻触及阶梯靶平面,中心对准第二阶梯,调节增益至适当位置,使始波及3 个界面反射波清晰可见并接近饱和。使用生物测量自动方式读出AL(探头端面距第3 阶梯距离)值,测量5 次,计算AL 的平均值AL0,按下列公式计算测量仪的测量误差σ,应小于规定数值。
σ=h–AL0V/ V0
式中:
σ——测量误差;
h——阶梯靶上平面至第三阶梯的高度;
AL0——测量仪显示的眼轴长度平均值;
V——脱汽水声速(应考虑温度修正);
V0——测量仪设定的眼轴平均声速。
V0在精确测量阶梯试块三个阶梯高度a、b、c 后按下式计算:
V0=[ a×V(AC)+(b-a)×V(LEN)+(c-b)×V(VITR)]/c
式中:V(AC):测量仪设定的前房声速
V(LEN):测量仪设定的晶体声速
V(VITR):测量仪设定的玻璃体声速
A 超探头端面为球面时,阶梯高度c 应加入效正因子r(见图2)。制造商应给出的曲率半径,D 为球面直径测量值,r 通过公式计算得到。测量误差公式改为:
σ=(h +r)–AL0V/V0

图2 加入效正因子r
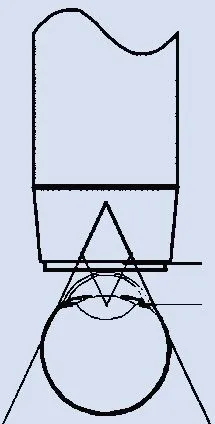
图3 B超检查眼内组织结构
2 眼体组织诊断
眼科B 超的预期用途是检查眼内组织结构,并以眼球为声窗检查视神经等眼眶组织(见图3)。眼体检查相比脏器要求有更高的测量精度和分辨力,为此眼超探头有较高超声工作频率,一般范围在10MHz~30MHz,GB10152-1997《B 型超声诊断设备》的性能指标不适用于眼超,应依照制造商提出的性能要求检测。值得期盼的是,眼科B 超的行业标准(《眼科B 型超声诊断仪通用技术条件》)正在审批,今后检测要求将有章可循。现有的B 超仿生模块是模拟大脏器的,眼体组织衰减系数与软组织差别很大,横(纵)向分辨力也较GB10152-1997 规范的B 超要高一个数量级,需提供至少从0.1mm 到0.4mm 增量为0.1mm 的距离间隔,现有仿生模块最小只有0.5mm 距离间隔,使用这种模块测量深度、横(纵)向分辨力、几何位置精度,甚至盲区均难以达到要求。
目前比较通用的方法是将线靶模块放置在脱汽水中测量深度、横(纵)向分辨力及几何位置精度,测量几何位置精度需要注意两点,一是将几何位置精度靶群置于探头的焦域,测量的精度最高;二是B 超通过发射超声波及接受回波信号的时差与声速计算图像的距离,由于仿生模块的材料受温度影响很小,可以不予考虑,但水温对于声速影响较大(即对距离计算影响较大),因此要求测试时脱汽水温保持在25˚C±2˚C。横(纵)向分辨力扫查时,眼科B 超探头端部一般为透声塑料制成的充油体,用一个单元式换能器时,系由电机驱动其作机械摆动,使声束扫描而成平面,探头前端侧面应有正确指示扫描平面的标记处于扫描平面上,只有扫描平面与靶线之间的摆放位置正确,扫描成像才最为清晰、准确。具体操作是将B 超探头置于测试靶上方,靶线排列方向与超声传播方向相同,探头端面与平行靶线排列平面垂直,在与靶线垂直的平面上进行扫描(见图4)。在脱气水中测试盲区还没有比较好的办法,需要配合现有的B 超仿生模块。由于水的衰减系数比眼体小,上述测量结果有一定偏差。随着眼体仿生模块推出,检测的准确性与便捷性将逐步提高。
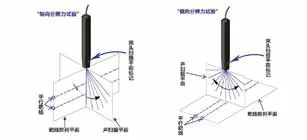
图4 轴向分辨力及侧向分辨力试验
3 角膜厚度测量
使用试块法检测眼超角膜测厚误差,对于试块精度要求很高,YY0107-2005 规定角膜厚度误差应不大于10μm,即要求试块各阶梯表面粗糙度Ra ≤0.8pm,且基本不受环境变化影响,同时对于试块的贮存、计量也较为困难。现在企业提供的角膜试块一般为塑料制品,容易变形,厚度均匀度也很难满足要求,同时对于试块声速的测量也较为困难。行业标准提出试块的声速不确定时采用水槽法,使用脱气水模拟角膜厚度,将探头放置水中测试一个最小角膜厚度值(注意探头不要与试块直接接触,避免提升探头时,对提升距离的计算产生影响),以温度计测量水温,得到该温度下的脱汽水声速V,按δ=d0V0/V 计算d0为0.2mm时的等效角膜厚度δ。调节角膜测厚探头与载玻片垂直,调节探头逐渐接近载玻片,当测量仪显示值到达δ±1μm 时将百分表校准为0.200mm,然后使探头提升
的距离d0为0.600mm,记录测量仪显示的测量值,测量5 次,求出平均值d,按公式(2)计算测量仪的测量误差σ,应符合规定。使用水槽法测量不仅避免了试块误差,由于探头不再需要直接与试样接触,同时避免了由于难以确保探头与试样之间接触良好及位置准确,而引入的人为测量误差。

式中:σ——测量误差 d ——角膜厚度测量平均值d0——探头提升的距离(0.600mm)V ——脱汽水声速(应考虑温度修正)V0——测量仪设定的角膜平均声速
4 小结
当前全球生产厂家设计的眼科测量仪有一定差异,特别是测量计算方法难以形成统一的标准,测量模块相互不能通用。在这种情况下,由厂家提供模块测试检验,也是目前情况下一种折中的考虑。我们也应该了解到眼体仿生模块生产技术要求很高,眼体的相关研究还在探索,国际上也没有一个正式的标准可供参考。希望眼体仿生模块的研究能够引起上级部门的重视,将其作为一项重要的科研课题研究。
[1]国家医用超声设备质量监督检测中心.YY0107-2005眼科A型超声测量仪[S].北京:中国标准出版社,2006.
[2]国家医用超声设备质量监督检测中心.GB10152-1997 B 型超声诊断设备[S].北京:中国标准出版社,1997.
[3]冯若,刘忠齐.姚锦钟,关立勋,超声诊断设备原理与设计[M].北京,中国医药科技出版社,1993.■
