用于测量圆顶视宁度的微温脉动仪的研制
2010-01-25王红帅刘威卫
王红帅,李 志,刘威卫
(1.中国科学院国家天文台云南天文台,云南 昆明 650011;2.中国科学院研究生院,北京 100049)
大气视宁度影响天文观测的分辨率。为了获得更好的成像质量,通常需要通过天文选址,将天文观测设备放在大气视宁度较好的地区。但如果天文建筑设计不当,造成的局部视宁度可能会比整层大气所造成的像质衰减还要严重,也就无法体现出好的天文台址和望远镜的效力。云南天文台丽江2.4m望远镜的圆顶在设计时采取了许多措施来减少圆顶视宁度的影响,包括圆顶内强制通风、加开侧窗、圆顶和观测室加隔离层等。为了综合考察这些措施的效果,需要能够测量圆顶内不同位置大气湍流的强度,得到温度结构常数以及折射率结构常数的强度和分布情况。
大气湍流的强度可以通过目视观测衍射环、恒星闪烁、较差像运动测量仪(DIMM)、声雷达等方法来测量[1],但以上方法反映的是整层或高层大气的湍流情况。对于近地面湍流,主要通过直接测量大气的微温脉动得到湍流强度。微温脉动测量的常用手段是金属丝微温脉动仪和超声风温仪。前者常用铂丝作为传感器,具有响应速度快、线性度好、分辨率高、体积小、易损坏等特点。超声风温仪频率响应快,工作稳定,不易损坏,但容易受水平风速和湿度影响,且价格较高[2]。考虑到测量装置最终要放置在圆顶的天窗附近以及成本控制,决定采用金属丝的微温脉动仪。目前国内有安徽光学精密机械研究所[3]和北京大学制作过类似的仪器。
1 仪器原理
根据Kolmogrov湍流各向同性假设,当大气中两点之间的距离位于大气湍流的惯性区时,其温度结构常数满足下列关系式:
CT2(r)=<[T(x)-T(x+r)]2>r-2/3.
(1)
其中T(x)、T(x+r)分别为空间两点的温度;r为二者之间的距离。
在光学波段,折射率结构常数和温度结构常数的关系可表示为:
Cn2(r)=[79.2×10-6×P/T2]2CT2(r)
(2)
其中P、T分别是空间测量点的气压(mb)和绝对温度(K)。
根据上面的公式,通过测量空间两点的温度差值(微温脉动)、平均气压和平均温度,可以得出折射率结构常数。在圆顶里面,望远镜前方光路的不同距离处,放置几组传感器,同时进行微温脉动的测量,然后对折射率结构常数在光路上积分,最终可以得到圆顶内的大气相干长度r0和FWHM。
(3)
FWHM=0.976λ/r0
(4)
h1,h2为传感器离地面的高度。
2 仪器组成描述
本套仪器的特点是同时采集8个微温传感器的数据,存储在各自的存储器(64K)中,再由指令控制下分时传送到主计算机,确保采集的同时性。该仪器由8个微温传感器、8个温度传感器和4个气压传感器组成。这些传感器分为4组,每组有2个微温传感器、2个温度传感器和1个气压传感器。微温测量采用20μm的铂丝,长约15cm。温度测量采用AD590M型温度传感器,分辨率±0.3℃。气压测量采用FKS-111型气压传感器,分辨率±1Pa。每组两个测量点之间的距离由实验确定,使其位于湍流的惯性区。铂丝传感器通过电桥,放大,V/F转换,单片机计数将温度的变化量转化为输出频率的变化。然后经串口通讯将测得的频率传输到PC机。温度和气压传感器读数通过数据采集卡进行AD转换,原理如图1。其中V/F转换采用TC9401芯片,仪表放大器输出的电压作为V/F转换的输入端,通过调整参考电压和电容,控制单位温度变化对应的输出频率值。采用AT89S52单片机对输出脉动进行计数。AD转换采用PCI卡,型号为AC6622。
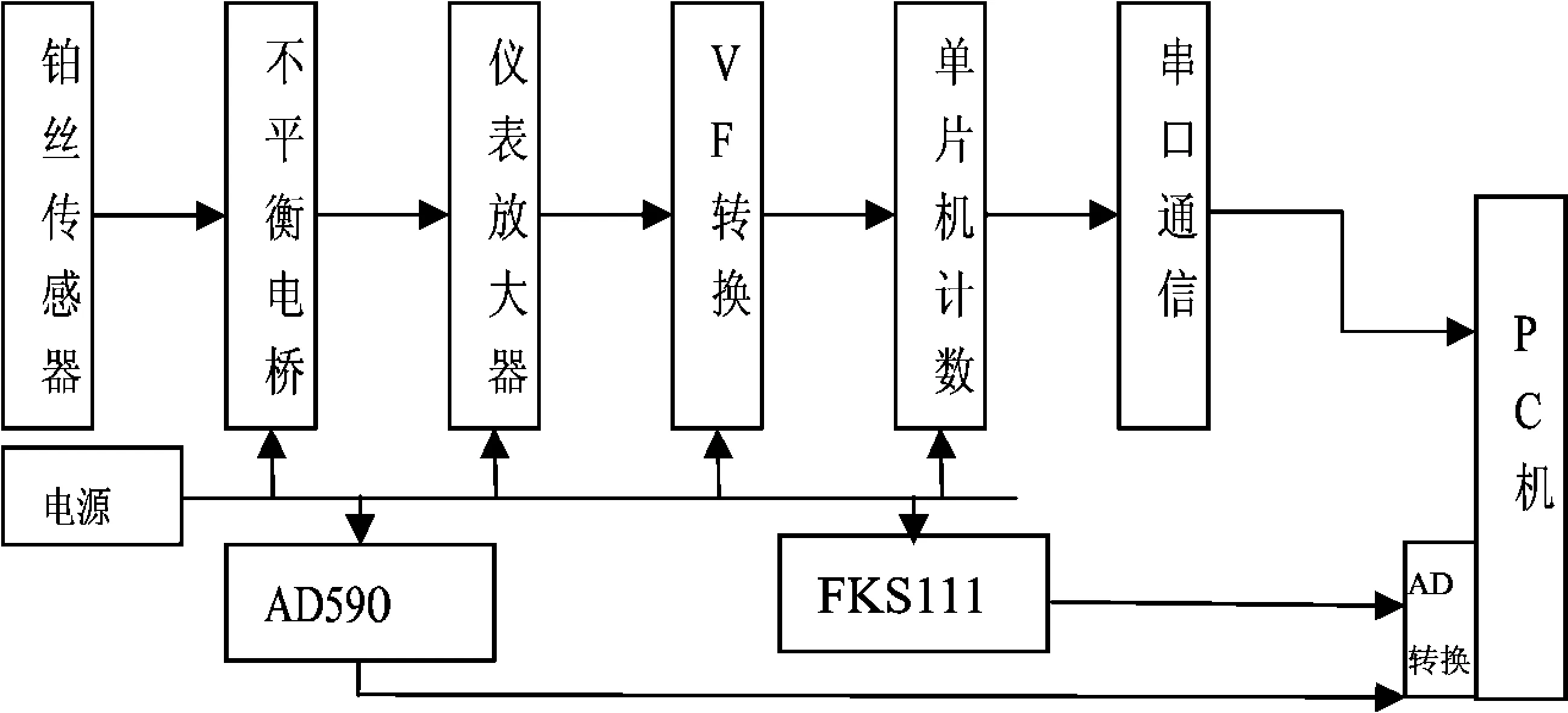
图1 系统硬件框图
3 数据采集软件
数据采集软件分为PC机和单片机两部分。
单片机中的程序主要测量频率值,使用MCS-51汇编语言编写。V/F转换器TC9401的输出范围是0~100KHz。当输出为100Hz时,每个脉冲周期为10μs。采样周期取50Hz,这是由于铂丝裸露在空气中,工业电流在上面感应出了幅值约0.2mv,频率50Hz的电动势,因此需要取20ms的间隔去掉这个干扰。如果单片机直接对脉冲计数,单片机的晶振频率为11.0592MHz,每个机器周期为1.085μs,在20ms的时间间隔内将会有一个计数脉冲的误差,而1个计数脉冲最小为10个机器周期,这样就损失了传感器的分辨率。因此这里采用了一种新的方法,计数器的初值设为0FFH,工作方式2,自动重载,一个脉冲产生一次中断,在中断处理程序中利用一个寄存器来记录脉冲的个数,计时器初值设为0。打开计数器,当第一个脉冲到来时产生中断,打开计时器,返回。在接下来的中断处理程序中,判断计时器的值是否达到20ms,如果没到,用来计数的寄存器加1,程序返回,继续等待下一次中断;如果计时器达到20ms,关掉计时器和计数器。利用此时的计时器的值以及计数的寄存器中脉冲的个数,就可以计算频率值。
PC机上的数据采集软件用VC++写成,主要用于控制单片机和AD卡上的数据采集,为微温脉动的数据采集提供控制信号和同步信号,并保存采集的数据。程序开始运行后,可以实现数据的自动采集和保存。
4 仪器定标
由于各个传感器之间存在系统误差,所以必须对它们进行定标。
对于温度传感器,在黄铜块上钻一些小孔,将每个要使用的AD590M传感器编号并全部放在里面。传感器的外壳采用导热硅胶连接,以便更好地传热。传感器外部封闭,将黄铜块放到冰水混合物里,测量此时的读数。然后将黄铜块放到一个装满热水的保温瓶里,得出在热水中的传感器的温度。通过计算,可得到不同输出电压对应的温度值。
对于气压传感器,由于传感器本身精度可以达到1Pa,不必进行定标。
对于微温传感器,将传感器放置于密闭的环境中,尽量减少空气流动,在一系列不同温度下分别测得输出的频率值,由于频率输出与温度值成正比,对它们进行线性拟合,可以得到输出频率差值所对应的温度变化值。
5 仪器测试
仪器制作完成后,在丽江2.4m望远镜圆顶内做了一个简单测试。传感器连续采样一定个数的数据,完成后将数据传给PC机,然后开始下一次的数据采集。经过测试,仪器能够实现连续的自动观测和数据传输。下面给出了放置在天窗附近的编号为3、4的两个微温脉动仪的几组数据。横坐标表示每次连续采集1000个数据,采样间隔为20ms。
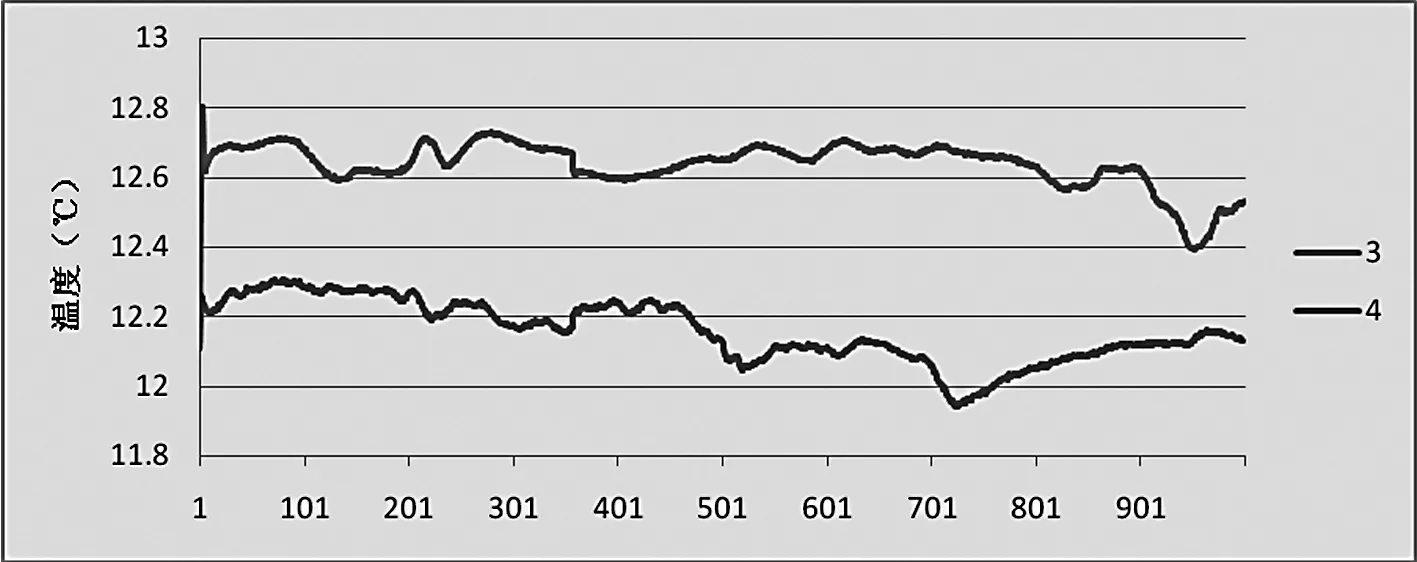
图2 4月2日18:40所取得的数据,天窗关闭
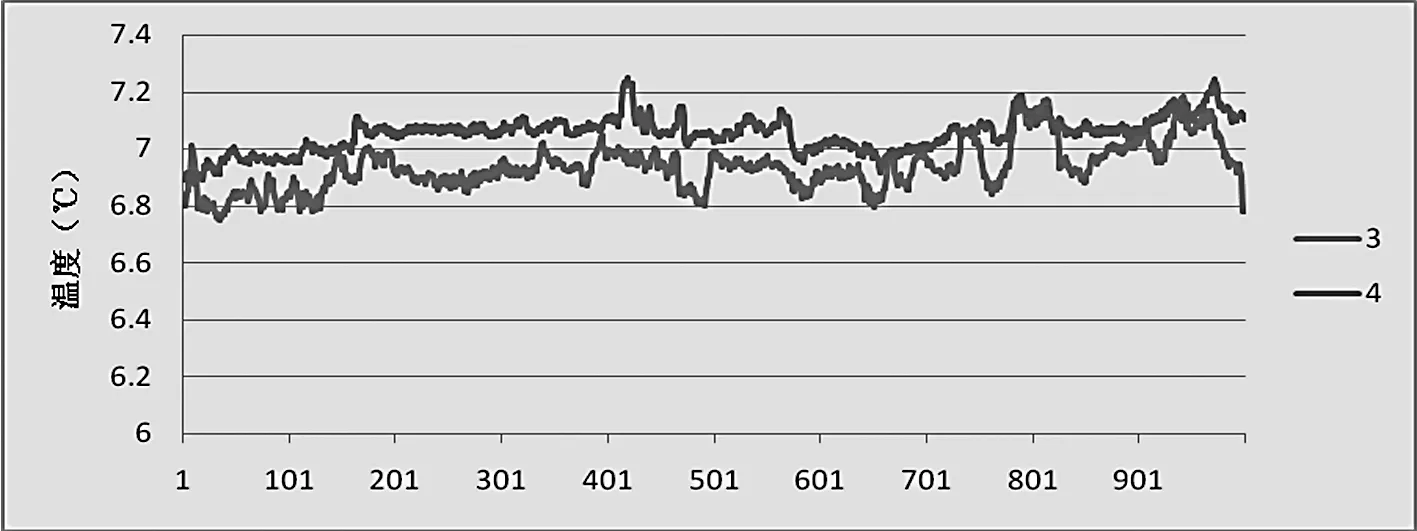
图3 4月2日20:21所取得的数据,天窗打开,望远镜在跟踪观测
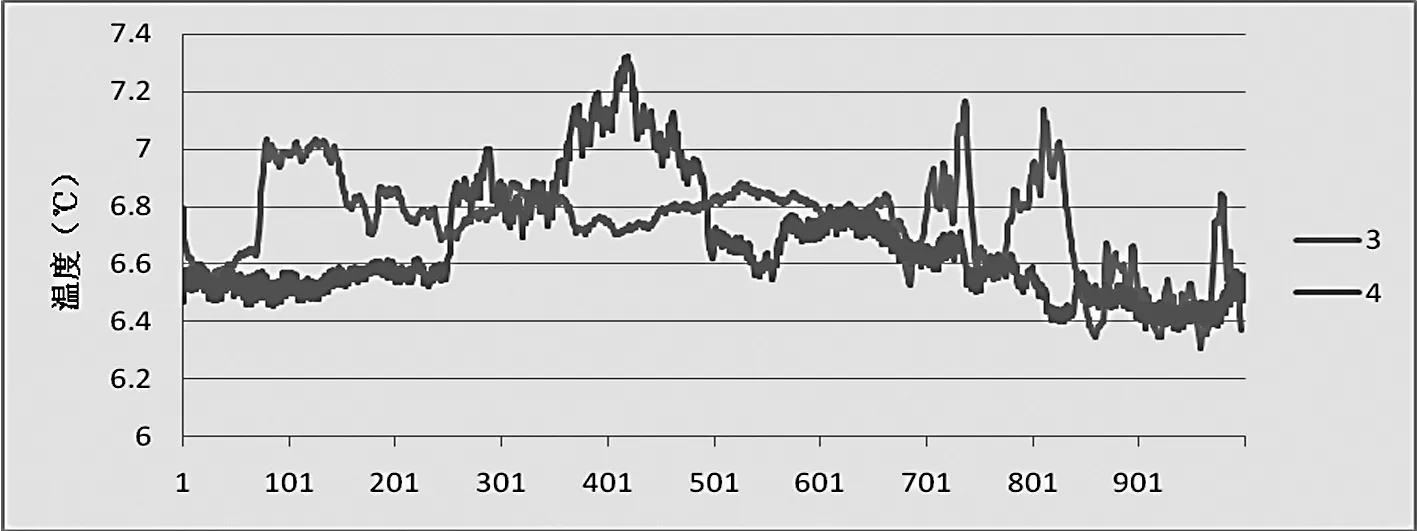
图4 4月2日22:38所取得的数据,天窗打开 3小时后
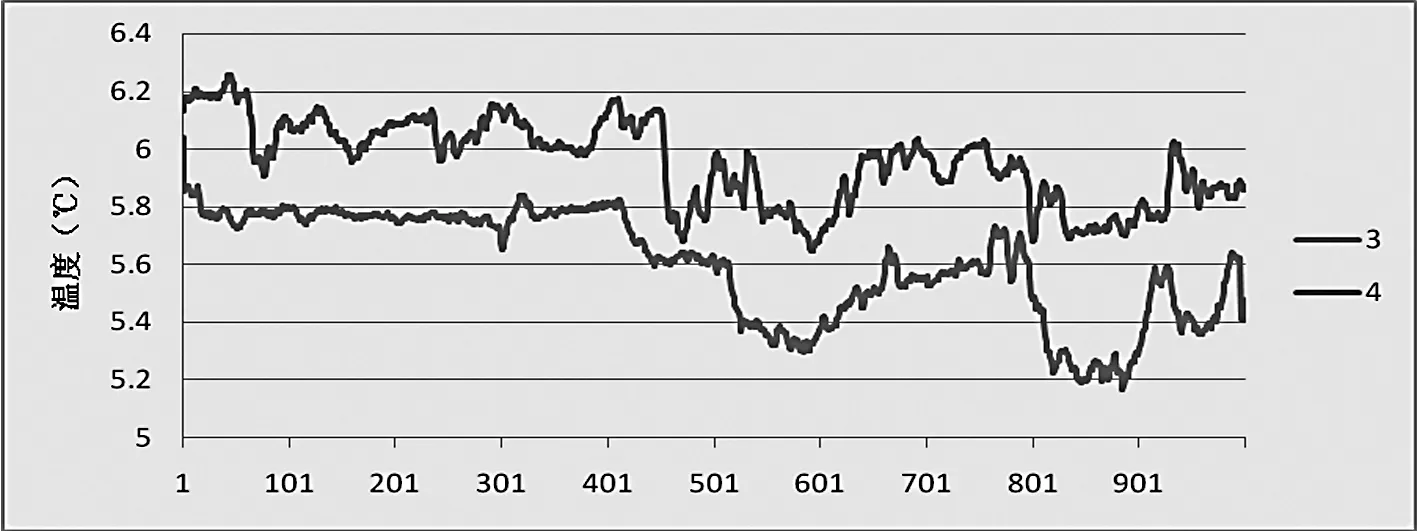
图5 4月3日12:00所取得的数据,天窗打开
这两个传感器被悬挂于圆顶内天窗附近,高度距地面约8m,距天窗约2m,略偏离望远镜的光路,两者之间间距1m。温度值为经过定标以后的值。可以看出两者间有一定的温差,说明距离已经超出湍流的惯性亚区,需要减小两个传感器之间的距离。
图2为天窗还没有打开时采集的数据,4号传感器更靠近天窗,天窗缝里漏进来的冷空气使得它的温度略低。图3为打开天窗40min后测得的数据,可以看出传感器测得的数据波动加剧。图4为天窗打开3h后的数据,温度波动仍然比较厉害。图5为第二天中午12:00测得的数据,天窗打开,两者有一定的温差,温度波动也比较大。
6 一些经验
在仪器制作和程序调试过程中,遇到了许多的问题,比较有代表性和参考意义的有以下几点:
(1) 50Hz的工业电流在铂丝传感器上产生了电磁感应,使测得的频率值有周期性的波动。如果望远镜运行,干扰更大(见图3,数据有一些高频的跳动)。可将铂丝传感器长度减小,这样能够有效减少电磁感应产生的噪声,并保护铂丝不受损坏。
(2) 数据传输采用RS232C,发现当传输距离比较长时(约30m时),波特率只能达到2400。因此将来考虑将RS232芯片换成RS485.
(3) 由于有多路数据同时采集和传输,因此连接线必须特别小心。连线的接口处要保持焊接良好。在圆顶内观测时,由于圆顶转动和风吹动,如果焊接不好,容易造成数据传输错误。
7 结束语
本套仪器调试成功后,将会根据运行的实际情况,对它进行不断完善。在以后的实验中,结合较差像运动测量仪,通过对两者的观测数据对比研究,将为研究天文建筑对视宁度的影响,提供有效的工具。
[1] 侯金良.天文选址的主要参数及测量方法[J].天文学进展,1994,12(2):126-132.
[2] 杜金林,张宏升,张霭琛.钨铼丝温度脉动仪的制作与应用[J].气象水文海洋仪器,2000,2:1-6.
[3] 吴晓庆,马成胜, 翁宁泉,等.一种用于天文台选址的气象参数和大气湍流测量系统[J].量子电子学报,2001,18(2):184-187.
