赤道式天文望远镜极轴调整分析及观测结果
2010-01-25何秋会孔大力刘岱钟
何秋会,孔大力,刘岱钟
(南京大学天文系,南京 210093)
天文望远镜是现代天文学探索宇宙的主要工具。天文望远镜装置一般分赤道式装置和地平式装置。赤道式装置有两根互相垂直的轴系,一根轴与地球自转轴平行,即它和地平面的交角等于当地的地理纬度,此轴被称为“赤经轴”或“极轴”。极轴是跟踪轴,望远镜在跟踪天体周日视运动时,以24小时/转的转速回绕极轴旋转。另一根轴叫“赤纬轴”,对于观测跟踪恒星天体,极轴旋转,赤纬轴只在指向观测目标星时旋转[1]。中小型天文望远镜采用的几乎都是赤道式装置,因为赤道式天文望远镜跟踪恒星时只要求极轴以和恒星相同的速度和方向旋转即可,望远镜控制相对简单,安装也方便。
赤道式天文望远镜极轴的正确位置应该是极轴指向天球极点,赤纬轴垂直于极轴,并在天赤道面内,只有在这种情况下,望远镜绕极轴的旋转才能和天穹的周日旋转一致。极轴安装和一定使用时间后都要进行校正,保证极轴处于准确的位置。望远镜指向精度和跟踪精度是望远镜本身的一项重要指标,他们都受到极轴位置准确性的影响,准确的极轴位置显得非常重要,因此极轴校正也是一项很重要的工作[2]。
南京大学天文系浦口观测站的两台天文光学望远镜都是赤道式望远镜,在测定他们的跟踪精度时,发现它们的跟踪精度很低,同时发现星像在赤纬方向有很大的漂移。图1是南京大学天文系浦口观测站的40cm天文望远镜跟踪一颗恒星时星像在赤纬方向随时间的漂移情况。从图1中可以看出,星像一个小时大约漂移了120个像素,每个像素是3.8″,相当于一个小时漂移了6′多,误差很大。
根据赤道式天文望远镜的特点,望远镜在跟踪的时候,只是极轴旋转,赤纬轴不旋转,所以星像只应该在赤经方向有漂移误差,而不应该在赤纬方向有漂移误差。由此判断,南京大学天文系40cm赤道式天文望远镜的极轴位置不准确,误差较大。不准确的原因可能多种,如机架的重力形度,极轴调整装置的锁定不牢产生游移,地基的不均匀沉降,原始安装时未调整到位等。为了提高望远镜的跟踪精度,首先必须对极轴进行校正。校正极轴只能从两个方向进行,一是调节控制极轴倾角的装置,校正极轴在子午面内的俯仰,二是调节控制极轴东西方位的装置,校正极轴东西方向的位置。
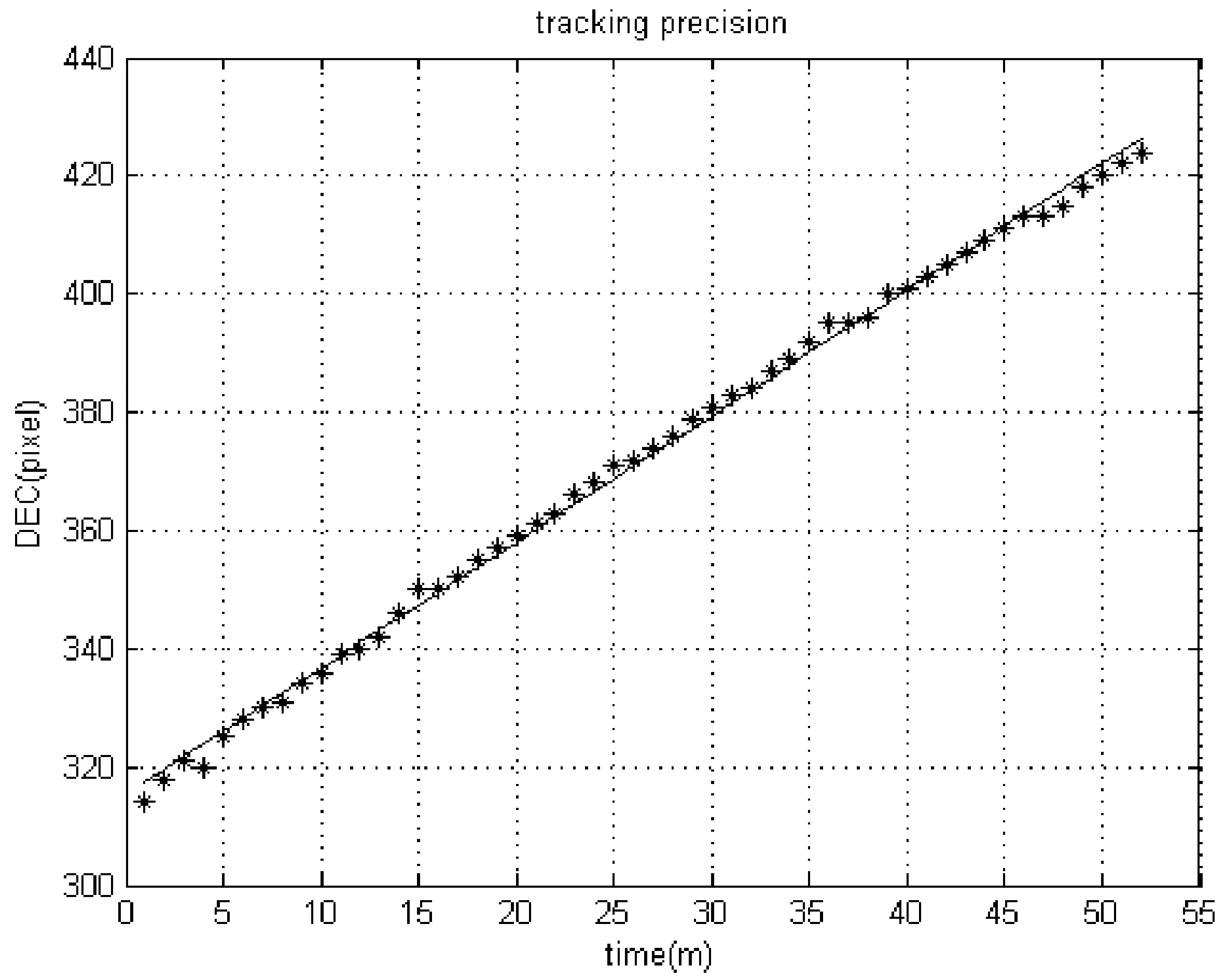
图1 星像在赤纬方向随时间的漂移Fig.1 Drifts of a stellar image along the declimation
对于赤道式天文望远镜,采用观测恒星的方法来校正极轴位置操作简单、方便,得到的极轴位置准确度也很高[3],只是选择观测的目标星比较讲究,目标星的选取影响到调节极轴控制装置的难易程度和极轴位置的准确性。下面先从理论上进行分析,探讨在校正极轴位置时选择什么位置的目标星进行跟踪比较合理。
1 理论分析
把极轴位置偏差及其引起的误差反映在时角坐标系中进行分析。时角坐标系中极轴位置偏差及其引起的误差如图2。图中PP′代表地轴,P1P2代表望远镜极轴实际指向,ZZ′代表当地天顶与天底连线(以下相同)。参看图2,极轴本应该指向P点,即P1P2与PP′应该重合,但是由于望远镜的极轴位置不准确,实际指向了P1点,使P1P2与PP′不重合,所以需要调节望远镜极轴的调整装置,改变望远镜极轴位置,使其最终指向P点。根据赤道式望远镜装置的特点,调整望远镜极轴位置只能分别从两个独立的方向即俯仰方向和东西方向进行,所以把极轴位置偏差引起的误差PP1在子午圈PN方向和垂直于PN方向的90°时角圈方向进行分解,在子午圈PN方向分解的误差为PP1NS,在垂直于PN方向的90°时角圈方向分解的误差为PP1EW,即误差PP1被分解为两个分量PP1NS和PP1EW。误差PP1NS可看成是望远镜极轴实际指向P1NSP2NS引起的,P1NSP2NS在子午面上,即PP1NS是极轴在子午面上偏差引起的,如图3。误差PP1EW可看成是望远镜极轴实际指向P1EWP2EW引起的,P1EWP2EW在90°时角圈所在的面上,即PP1EW是极轴在90°时角圈所在面上偏差引起的,如图4。可以这样认为:P1NSP2NS是P1P2在子午圈上的投影,P1EWP2EW是P1P2在90°时角圈上的投影。如果极轴位置准确,P1NSP2NS和P1EWP2EW都应该与PP′重合。下面分别对图3和图4两种情况进行讨论。先讨论极轴在子午面方向偏差的情况,如图3。
在图3中,σ为目标恒星过中天的位置。设极轴的实际指向P1NSP2NS与PP′的夹角为θNS,当目标恒星过中天时望远镜开始跟踪。目标恒星的运动轨迹在天球上是一个周日平行圈σσ′。由于θNS不等于0,望远镜跟踪时,他指向点Σ将逐渐偏离σσ′,沿着以P1NSP2NS为旋转轴决定的望远镜跟踪周日平行圈σΣ运动。经过12恒星时后,恒星到达σ′点,望远镜指向位置到达Σ点,σ′点与Σ点的运动速度方向与子午面相切,两点速度方向的夹角为0,同时,两点的运动角速度相同,设为ω。

图2 极轴位置误差在时角坐标系中Fig.2 Deviations of the polaraxis in the hour angle coordinate system
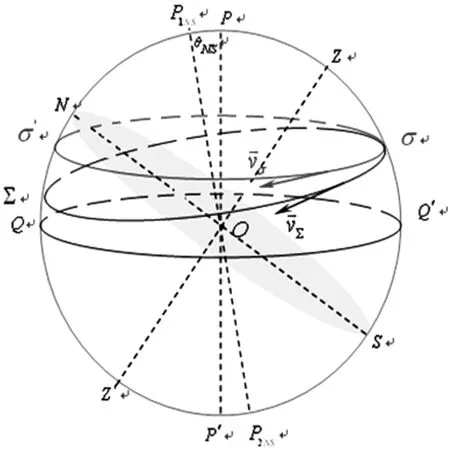
图3 极轴位置偏差在子午面上的情况Fig.3 Deviation of the component of the polaraxis on the meridian plane

图4 极轴位置偏差在90°时角圈所在面上的情况Fig.4 Deviation of the component of the polaraxis on the 90 degree hour-circle plane

图5 坐标关系Fig.5 Geometry of the coordinate systems
下面计算经过任意时间t后,目标星到达点和望远镜指向点两点运动速度矢量的夹角
(1)
目标恒星在o-xyz坐标系中的运动参数方程为:
将其转化到o′-x′y′z′坐标系中,变为:
则目标恒星运动速度的方向矢量为:
望远镜指向点Σ的运动参数方程为:
RσΣ为σΣ的半径且取RσΣ≈1。相应速度矢量为:(cosωt,-sinωt,0)T,因此:

=cos2ωt+cosθsin2ωt
=1-(1-cosθ)sin2ωt
ωt等于天体的时角T,即:
cos
(2)
由式(2)可以看出,
由以上分析可知,在校正极轴的俯仰时,应该选择时角T=6h和T=18h位置的恒星即观测90°时角圈位置的恒星作为观测目标恒星。
用同样的数学方法讨论误差在90°时角圈方向分量的情况,即图4的情况,可以得出
2 校正方法
通过上面的分析,在实际校正中,选取合适的观测目标星,校正极轴就会变得相对容易,结果也更精确。具体操作步骤是:首先调整望远镜探测器CCD,使CCD探测器X轴方向与赤经方向平行,使Y轴方向与赤纬方向平行;然后调整控制极轴东西移动的装置和调节控制极轴俯仰的装置来校正望远镜极轴位置。
图6 星像在视场中可能出现的几种形式
根据上面的理论推导,选择最佳的观测目标星,望远镜指向该观测目标恒星,跟踪该恒星一段时间,看恒星星像在视场里面的移动情况。当恒星星像在视场中在Y轴方向没有变化,如图6(a),这说明极轴的位置是准确的;但是当恒星星像移动轨迹与X轴有一定的夹角,如图6(b)和图6(c),这时候极轴就处在不准确的位置上,应该对极轴的位置进行校正。将这样的观测和校正工作反复进行几次之后,使望远镜极轴处于非常准确的位置。

图7 星像划过视场的痕迹Fig.7 Traces of stars in the field of view
对南京大学浦口观测站的赤道式天文望远镜的极轴进行了校正。望远镜的后端探测器是SBIG公司的ST-8CCD照相机,CCD像元数是765×510,像元尺寸是9μm×9μm,像元空间尺度是3.8″/像元。在调整之前,先调整CCD的位置,使CCD照相机X轴方向与赤经方向平行,使Y轴方向与赤纬方向平行,调整好CCD方位后星像划过视场的痕迹如图7。调整好了后开始跟踪过目标恒星,然后校正极轴的位置。首先校正极轴的东西方向位置。图8~图10是跟踪过中天的恒星时星像在y方向的偏移情况。图8是调整之前测的星像在y方向随时间的偏移情况,根据离散点进行了直线拟合,拟合直线的斜率是-0.4912,由此可以看出一小时星像在赤纬方向的漂移是将近2′,这样的跟踪精度已经大大的超出技术指标。根据分析,向西移动了0.6mm,得到的跟踪过中天的恒星星像在y方向的偏移如图9,拟合直线的斜率是-0.2281,比调整之前好了很多,通过几次的调整得到跟踪过中天的恒星星像在y方向的偏移如图10,拟合直线的斜率是0.0643,即一小时也只是几个像素的偏移,通过初步调整已经取得了比较好的效果。
初步校正好极轴的东西方向后,然后校正极轴的俯仰方向。极轴俯仰的校正方法和步骤同调整极轴东西方向位置完全一样,只是当校正极轴的倾角时,目标观测恒星选择接近90°时角圈位置的恒星,值得注意的是因为90°时角圈附近的恒星大多接近地平,受大气蒙气差影响很大,所以尽量避开选择接近地平的恒星,南京的地理纬度为32°多,可以选择在北极星附近的在90°时角圈上的恒星作为目标恒星,避免大气蒙气差较大的影响。图11是调整极轴俯仰前测得的星像在y方向随时间的偏移情况,根据离散点进行直线拟合,拟合直线的斜率是0.5893,由此可以看出一小时星像在赤纬方向的漂移大致36像素,超过2′,跟踪精度已经大大的超出技术指标。通过两次调整得到跟踪星的星像在y方向的偏移如图12,拟合直线的斜率是0.32,斜率明显的减小,说明通过初步调整,取得了比较好的效果。
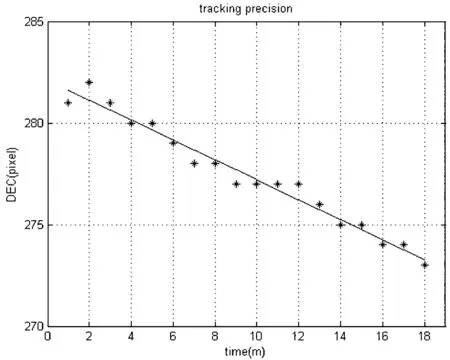
图8 星像在y方向的偏移情况Fig.8 Drifts of a stellar image along the declination
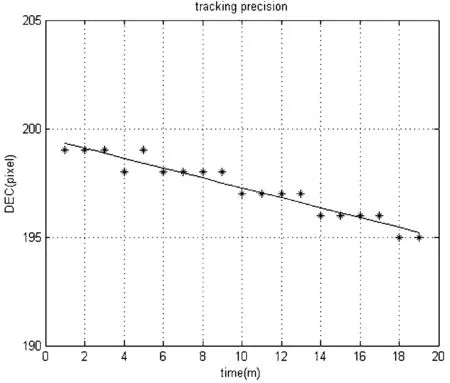
图9 星像在y方向的偏移情况Fig.9 Drifts of a stellar image along the declination
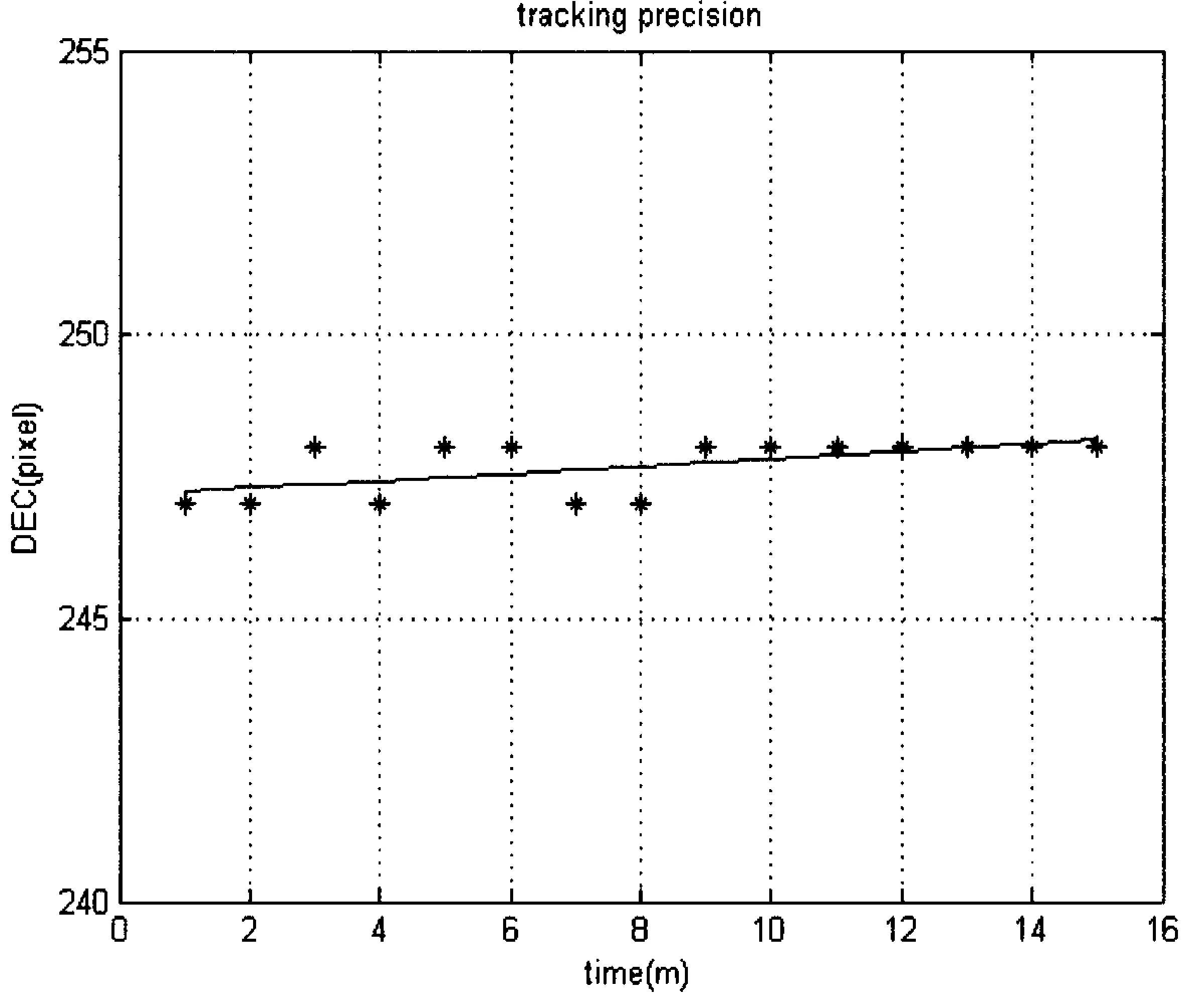
图10 星像在y方向的偏移情况Fig.10 Drifts of a stellar image along the declination
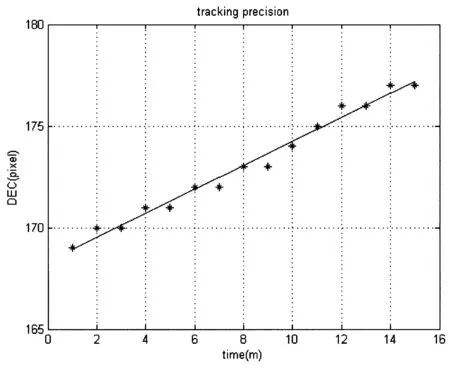
图11 星像在y方向的偏移情况Fig.11 Drifts of a stellar image along the declination
最后调整极轴东西方向和调整极轴俯仰方向交替进行多次,望远镜的极轴将处于相当准确的位置。2009年5月21日,对多次交替调整好后的望远镜进行了再次的跟踪测定,跟踪的恒星是delta virginia,时间是该星过中天一小时后进行跟踪,地平高度是50°多,跟踪40min,星像坐标数据如表1。跟踪星的星像在y方向的偏移情况如图13。

图12 星像在y方向的偏移Fig.12 Drifts of a stellar image along the declination

时间(m)2468101214161820X(pixel)349349348350350351352352354353Y(pixel)252252252253252252252252252252时间(m)22242628303234363840X(pixel)354356356357358358360360361362Y(pixel)251252251251251251251251252251
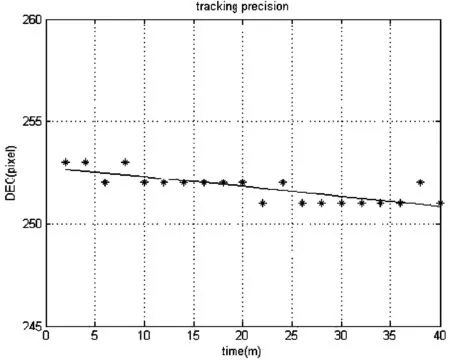
图13 星像在y方向的偏移Fig.13 Drifts of a stellar image along the declination
从表1和图13可以看出,通过40min的跟踪,Y方向坐标的变化几乎只有一个像素左右,认为这可能是人为读数误差,也可能是极轴还没有十分准确的原因,总之可以肯定的是,在通过极轴的校准后,已经很好地改正了赤纬方向的误差,说明极轴处于比较准确的位置。
3 结束语
通过理论指导,正确合理地选择观测目标恒星,为通过观测恒星方法校正极轴位置提供理论依据。把上面的方法应用到南大浦口观测站的40cm赤道式天文望远镜上,通过2009年3~5月对其极轴的校正,极轴基本上在准确的位置。现在该望远镜已经拆卸,正搬往南京大学仙林校区的观测站,当在仙林校区进行安装校正的时候,上面提供的方法也将再次被使用。
[1] 覃育.天文望远镜的装置[J].飞碟探索,2007,2:37.
Qin yu.The Set of the Astronomical Telescope[J].The Journal of UFO Research.2007,2:37.
[2] 何秋会,刘利利,汪翊鹏,等.南京大学65cm天文望远镜指向精度的修正研究[J].南京大学学报,2005,41(4):356-363.
He Qiu-Hui,Liu Li-Li,Wang Yi-Peng,et al.Correction of Pointing Accuracy of NJU-65cm Telescope[J].Journal of Nanjing University,2005,41(4):356-363.
[3] 钱伯辰.1.56米望远镜的极轴校正和跟踪误差测定方法与结果[J].中科院上海天文台年刊,1992,13:167-169.
Qian Bo-chen.The Adjustment of Polar Axis and the Measurement of Tracking Error for 1.56m Telescope[J].Annals Shanghai Observatory Chinese Academy of Sciences,1992,13:167-169.
[4] 胡中为,萧耐园.天文学教程(上册)[M].北京:高等教育出版社,2003.