汽车转向系统发展简述
2010-01-08丁志刚宋洪烈
丁志刚 宋洪烈
汽车转向系统发展简述
丁志刚 宋洪烈
福建工程学院机电及自动化工程系
本文综述了汽车助力转向系统的发展,包括传统机械转向系统,液压助力转向系统,电液助力转向系统和下一代线控电动转向系统。阐述了汽车转向系统发展的状况,指出了各种转向系统的结构特点、工作原理及优缺点,并展望了汽车线控转向系统未来的发展方向。
汽车;转向系统;发展趋势
引言
近年来,随着社会生活的汽车化,汽车的保有量不断增加,由此造成交通情况错综复杂,使得驾驶员转向盘的操作频率增大,这就需要减轻驾驶疲劳,提高操纵的轻便性和灵活性,因此对动力转向系统的要求也越来越高。
至今,汽车转向系统经历了传统机械转向系统、液压助力转向系统、电液助力转向系统和电动助力转向系统4个发展阶段,未来则可能向线控动力转向系统发展。目前汽车转向系统正处在液压助力转向系统、电液助力转向系统向电动助力转向系统发展的过渡阶段[1]。
1 传统机械转向系统
传统机械转向系统(MS)主要由转向操纵机构、转向器和转向传动机构3部分组成。转向操纵机构是驾驶员操纵转向器工作的机构,包括从方向盘到转向器输入端的零部件。转向器是把方向盘传来的转矩按一定传动比放大并输出的增力装置,转向器最早采用的是蜗轮蜗杆式,以后陆续出现了螺杆螺母式、齿轮齿条式、循环球式等形式。转向传动机构是把转向器输出的力矩传递给转向车轮的机构,包括从转向摇臂到转向车轮的零部件[2]。当汽车需要改变行驶方向时,驾驶员通过转动方向盘,转向力矩经由转向轴、转向器、直拉杆、横拉杆和梯形臂等机件使转向节偏转,实现汽车方向的改变。
传统机械转向系统的优点是结构简单、工作可靠、生产成本低。其缺点也非常明显:①随着汽车速度的提高和汽车质量的增大,转向操纵难度增大,转向越来越费力。②是其传动比是固定的,即角传递特性无法改变,导致汽车的转向响应特性无法控制,传动比无法随汽车转向过程中的车速、侧向加速度等参数的变化而进行补偿,驾驶员必须在转向之前就对汽车的转向响应特性进行一定的操作补偿,这样无形中增加了驾驶员的精神和体力负担[2]。
2 液压助力转向系统
液压助力转向系统(HPS)是在传统机械转向系统基础上额外加装了一套液压助力系统,一般由油泵、V形带轮、油管、供油装置、助力装置和控制阀等组成。它以液压油为动力,通过液压泵产生的动力来推动机械转向器工作。
由于该系统通过液压力作用来推动传统机械转向机构的转向运动,从而减轻了驾驶员的劳动强度,在一定程度上解决了传统机械转向系统由于传动比固定而造成的转向“轻便”与“灵敏”之间的矛盾。但是,这类动力转向系统是靠方向盘转动时带动扭杆直接改变液压系统油路的通道面积来提供可变的助力。即助力大小与车速的高低没有关系,只与转向角度有关。转向盘转过的角度越大,液压系统提供的助力也越大。同时,该系统存在着以下缺点:①不管汽车转不转向,只要发动机工作,液压助力泵就会在发动机带动下工作,额外消耗发动机的能量。②转向助力特性不可调,高速和低速时助力特性相同。在低速转向需要较大助力时,往往因发动机转速低而助力效果差,而在高速转向需要较小助力时,会因发动机转速高而助力作用大,导致转向过于灵敏,使汽车的操纵稳定性变差。③液压系统本身所固有的液压油泄漏问题和转向噪声使得转向舒适性大大下降,同时对环境造成污染。
由于液压助力转向系统工作可靠、技术成熟,能提供大的转向助力,目前被广泛应用。
3 电液助力转向系统
电液助力转向系统的转向助力特性在工作时可以改变。它主要有2种类型:电控液压助力转向系统(ECHPS)和电动液压助力转向系统(EHPS)。目前汽车上应用最多的是电动液压助力转自系统。
3.1 电子控制式液压动力转向系统
电控液压助力转向系统(ECHPS)是在液压助力转向系统基础上增加了控制液体流量的电磁阀、转矩传感器、车速传感器以及转向控制单元等元件。理想情况下,汽车在原地转向时要求转向尽量轻便,在汽车以不同的速度运行时,能实时提供相应的转向助力以克服该运行速度下的转向阻力,使驾驶员既能轻便地操纵方向盘,又有足够的路感。
在转向过程中,通过转矩传感器、车速传感器等感应器件将转向速率、车速等参数传递给转向控制单元。经解算后,控制电磁阀使液体流量随车速的变化而改变,进而改变助力矩的大小,使驾驶员的转向手力根据车速和行驶条件变化而改变,使操纵轻便性和稳定性达到和谐统一。但同时,ECHPS也存在着由于油泵的持续工作所造成的多余能量消耗,整个液压系统占用空间大、容易泄漏、噪声大等缺点,而且增加了车速检测控制装置。而且控制阀的结构较HPS复杂且成本较高,目前主要应用于高级轿车及运动型乘用车上。
3.2 电动液压助力转向系统
电动液压助力转向系统(EHPS)也是在液压助力转向系统基础上发展起来的。其特点是将原来由发动机驱动的液压助力泵改由电动机驱动,并且增加了车速传感器、转向角速度传感器以及转向控制单元等电控装置。该系统的液压储油罐、油泵、电动机和转向控制单元都集成在电动机油泵组内。工作时转向控制单元根据汽车的行驶速度和方向盘转向角度等输入信号计算出理想的输出信号,控制电动机输出适当的功率,驱动液压助力泵工作。通过液压油为转向器提供助力[3]。
当汽车低速行驶时,转向控制单元控制电动机输出较大的转矩,使驾驶者可以轻松地转动方向盘;当汽车高速行驶时,转向控制单元控制电动机输出较小的转矩,这样驾驶者在操纵方向盘时就比较稳定。由于电动机的转速可调,可以即时关闭,与液压助力转向系统相比,它节省了发动机的燃油消耗,提高了经济性。
电液助力转向系统尽管在液压助力转向系统基础上有了较大的技术改进,但液压装置的存在使得该系统仍有难以克服的缺点,如存在渗油、不便于安装维修等。虽然实现了变助力特性,但该系统在液压助力系统基础上又增加了电子控制装置,使得系统结构复杂,成本增加。由于电液助力转向系统技术较为成熟,可以实现整车电控系统的一体化,作为传统液压助力转向系统向电动助力转向系统过渡的中间技术,在一定时间内还将继续得到应用和发展。
4 电动助力转向系统(EPAS或EPS)
电动助力转向系统是在传统机械转向系统的基础上,增加了传感器装置、电子控制装置和转向助力机构等。其特点是使用电动执行机构在不同的驾驶条件下为驾驶员提供合适的助力。系统主要由电子控制单元ECU、扭矩传感器、车速传感器、电动机、离合器和转向柱总成等组成(图1)。
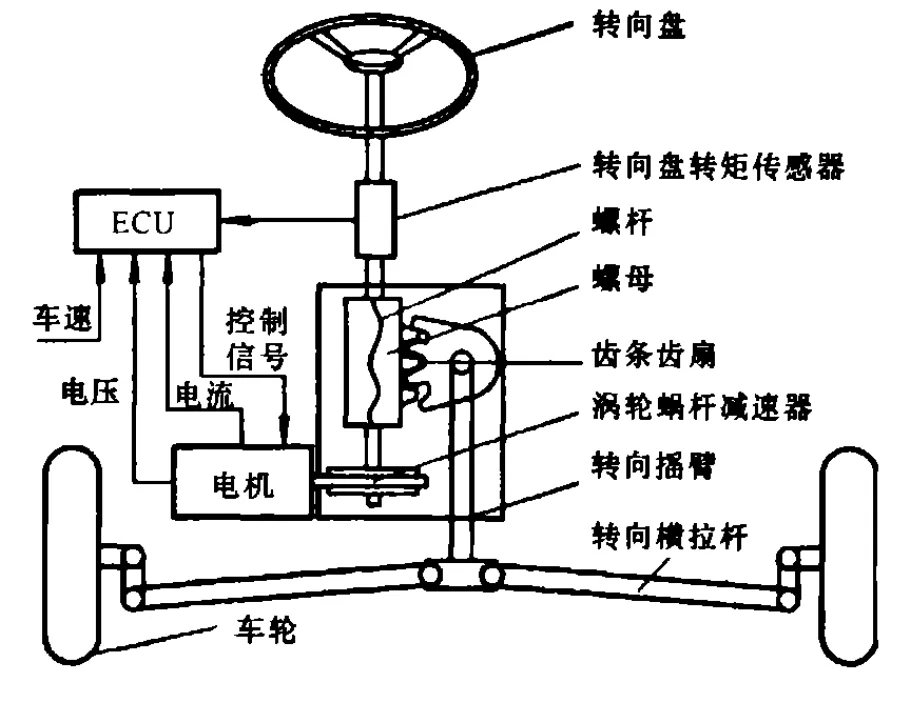
图l 电动助力转向系统简图
电动助力转向系统工作原理是:驾驶员操纵方向盘转向时,传感器将驾驶员作用于方向盘上的扭矩信号、车速信号、发动机转速信号输入ECU,ECU对输入信号进行运算,查询助力表格,确定目标电流的大小和方向,从而控制电动机的电流和方向,电动机经减速机构及离合器将扭矩传递给转向机构,从而为驾驶员提供合适的助力;当转向系统出现故障时,EPS系统不助力。不转向的情况下,电动机不工作。电动助力转向系统可以实时地在不同的车速下为汽车转向提供不同的助力,保证汽车在低速行驶时轻便灵活,高速行驶时稳定可靠。电动助力转向系统总体上包括机械部分和控制部分。机械部分主要包括传动单元(离合器、转向柱总成)和执行单元(电机)等。控制部分主要是根据传感器测得的车速和扭矩信号进行运算处理发出控制指令,驱动电机从而为转向提供助力。
EPS与HPS相比,除节省能源外,由于取消了液压系统而提高了环保性能,很好地解决了液压传动带来的种种弊端。整套系统由生产厂家一起提供给整车生产厂,可以直接安装。对不同车型、不同工况以及不同驾驶员所需的不同转向助力特性,可通过软件修改,方便快捷。完整的EPS系统还包括故障诊断与安全保护系统。当发生故障时,能停止助力,自动恢复到手动控制方式并发出警报信号,同时显示所记忆的异常内容如扭矩传感器本身异常、车速传感器异常以及电动机工作异常、蓄电池异常等等[5]。
电动助力转向系统已成为目前汽车转向系统技术发展的主流,但是该系统也有其局限性,由于电动机的发电功率和提供的转向助力也很有限,如果车身较重,转向系统需要有较大的驱动力量,电动助力转向系统就显得力不从心了。所以该系统多用于小型汽车上,目前已大量装备到中高级轿车上,并逐渐向普通型轿车和小型商用汽车发展。
5 线控动力转向系统
随着动力转向技术的发展,线控动力转向系统(Steering By Wire,简称SBW)是随着汽车电子技术发展的最新成果而成长起来的一种全新转向系统。它通过电线传递信号,控制执行机构动作来取代传统转向系统的机械传动和机械连接,助力矩由主控制器在相应参数进行解算之后,向转向执行电动机下达指令,由转向助力电动机提供。
SBW取消了转向盘和转向轮之间的机械连接装置,改由方向盘模块、转向执行模块和主控制器ECU,3个主要部分以及自动防故障系统、电源等辅助模块组成。它是由一个实时总线结构(例如CAN,TTP或FlexRay)连接到设备[6]。可以很方便的和其他系统集成、统一协调控制。系统工作时,传感器检测驾驶员的转向数据,然后通过数据总线将信号传递给车上的ECU,并从转向控制系统获得反馈命令[7]。转向控制系统也从转向操纵机构获得驾驶员的转向指令,并从转向系统获得车轮情况,从而指挥整个转向系统的运动。转向系统控制车轮转到需要的角度,并将车轮的转角和转动转矩反馈到系统的其余部分,比如转向操纵机构,以使驾驶员获得路感,这种路感的大小可以根据不同的情况由转向控制系统控制。该转向系统具有许多优点[8]:①消除转向干涉问题;②去掉了原来转向系统各个模块之间的刚性机械连接,大大方便了系统的总布置;③舒适性提高;④可以个性化地适合特定的驾驶者和驾驶环境,与转向有关的驾驶行为都可以通过软件来实现;⑤消除了撞车事故中转向柱伤害驾驶员的可能性,不必设置转向防伤机构;⑥驾驶员腿部活动空间增加,出入更方便。
由于转向盘和转向柱之间无机械连接,生成让驾驶员能够感知汽车实际行驶状态和路面状况的“路感”比较困难,所以目前线控动力转向系统仅用于一些概念车。还没有进行批量生产和安装,其可靠性和成本是阻挠其发展的主要原因。主要表现在如果微控制器出现问题,转向系统将完全失灵,它不像电动助力转向系统、电液助力转向系统和液压助力转向系统,在电动机或者液压系统出现问题时,还可以以人力来控制汽车[9]。该系统的微控制器如果出现故障,因为没有机械系统连接方向盘和转向器,所以根本不可能控制汽车的转向。
6 对线控动力转向系统的展望
尽管线控动力转向系统现在不尽如人意,但SBW仍然清楚的是汽车发展方向。SBW系统消除了机械之间的联系,方向盘,轮胎的设计就会大大简化了。不仅提高了设计的效率,而且提高了汽车的经济性,并从整体上提高安全性。SBW系统的工作主要由电子元器件承担。电子元件的应用标志着相当数量的机械零件的减少,以及转向系统整个尺寸和重量的减轻。转向的整个过程由电子器件来实现,这大大提高了车辆的燃料利用率。因为只有在需要转向的时候,才有能量消耗。基于瞬时驱动的条件,控制单元接收其他系统传来的数据,执行机构只供给轮胎所需的力。转向性能的提高是依赖于传感器所接收到的速度、牵引力控制系统及其他有关的变量。当事故发生时,对司机最危险的是方向盘的碰撞。在装有SBW系统的汽车上,许多由于方向盘的伤害和死亡都可以消除。
由于取消了机械连接,所以转向的高可靠性是绝对必要的。在欧洲,已经有相关的标准,如IEC 61508和EN 61511[10]。单纯的电子系统不能保证的失效的条件概率小于10次故障/小时。由于此而设计出的容错的体系结构,以及准确的处理策略方法都是必要的。在控制策略方面的故障避免、丢弃错误数据、主动检测、自我诊断和保护将用于实现安全和可靠性[11]。可以预见对于SWB系统的容错的分析和设计,将会成为SWB普及前的一个重要课题。
[1] 舒华,姚国平.汽车新技术[M].北京:国防工业出版社,2005.
[2] 朱华.汽车电动助力转向系统及其研究现状[J].汽车零部件,2009,3 (6): 76-78.
[3] 周淑辉,李幼德等. 汽车电子控制转向技术的发展趋势[J].汽车电器, 2006 (11):1-3.
[4] 黄安华,卜宪卫.浅谈汽车的转向系统[J].Automobile Parts,2010,1(1):81-82.
[5] 朱华.汽车电动助力转向系统研究现状及趋势[J].技术与应用APA, 2010, 1(1):34-38.
[6] WALLENTOWITZ, H., AND REIF, K. Handbuch Kraftfahrzeugelektronik. Vieweg+Teubner, 2006:1-3.
[7] 陈奎元,马小平,季学武.电动助力转向系统控制技术的研究[ J ]. 江苏大学学报:自然科学版, 2004, 25 (1): 21-24.
[8] 周名,余卓平,赵治国.动力转向技术的发展[J].轻型汽车技术, 2004(10): 9-10.
[9] 王常友,董爱杰.汽车转向系统的现状及发展[J].北京汽车,2007(3): 7-10.
[10] Nico A. Kelling and Patrick Leteinturier,“X-by-Wire: Opportunities,Challenges and Trends, 2003-01-0113, SAE World Congress, Detroit,MI, March :3-6.
[11] E. Fischer, “Standard multi-body system software in the vehicle development process”,Vol. 221 (1), (2007).
Brief Description on Automotive Steering Systems
DING Zhi-gang , SONG Hong-lie
(Electromechanical and Automation Engineering Department, Fu jian University of Technology, Fu zhou 350108, China)
As an important component of the car, Automotive steering system is to determine the key automotive active safety assembly. This article summarizes the vehicle power steering system development. Including traditional mechanical steering system (MS), hydraulic power steering system (HPS), electro-hydraulic power steering systems (EPS) and next-generation wire electric power steering system (SBW).And described the development of the automobile steering system, points out the structural characteristics of various steering system, working principle and the advantages and disadvantages, and the prospect of steering the future development of the SWB .
Automotive; Steering System; Development trend.
福建省科技平台建设项目(2008J1002),福建省科技平台建设项目(2007H2009)。
