考虑物理特征的避障路径生成算法
2010-01-01罗月童王晓静瞿德清刘晓平
罗月童, 王晓静, 瞿德清, 季 浩, 刘晓平
(合肥工业大学计算机与信息学院VCC研究室,安徽 合肥 230009)
路径生成算法是仿真、游戏等领域的重要研究内容,避障路径生成算法是其重要组成部分。文献[1]的算法(如图1 所示)是早期研究工作的一个代表,它首先依据障碍物的凸包确定路径上的关键点,然后用直线依次连接关键点构成避障路径。这种算法不仅所生成的路径不真实,而且它没有考虑运动物体固有的物理属性,如车辆的尺寸、速度、转弯半径等。
本文以车辆为对象,考虑车辆的自身尺寸、速度、转弯、半径等物理属性,提出并实现了一种基于物理模型的避障路径生成算法。

图1 利用直线和障碍物凸包得到路径
1 问题分析
避障路径生成可分为两大步骤:首先按某种规则确定一组关键点,然后采用某种插值算法将所有关键点连接生成一条路径。路径插值算法很多,如文献[1]中线性插值算法、文献[2]中的基于Hermite 样条曲线的路径生成算法。因为,三次参数样条曲线可以经过每一个给定的型值点(路径关键点),给定端点约束条件,便可生成一条C2连续的曲线,且具有几何不变性及局部性等特 点[3-6],本文基本采用三次参数样条曲线拟合避障路径。因此,问题的关键是确定避障路径的关键点,本文的方法考虑以下因素:
· 障 碍 物 本文仅考虑障碍物的尺寸和形状属性;
· 运动车辆 本文考虑车辆尺寸属性和转弯半径属性;
· 原有路径 为了保证避障路径和原路径之间的G1连续性,本文方法在确定避障路径关键点时需要考虑原有路径的属性。
2 避障路径生成算法
避障路径生成过程如图2 所示,首先需要根据某些条件来确定路径关键点;对于给定的n 个关键点,只要知道各关键点处的空间坐标和边界条件,就可以计算得出各点处的切向量[5],进而得到各Hermite 曲线段的边界条件,最终插值得到整个样条曲线,即生成路径。

图2 避障算法流程
2.1 确定路径关键点
作为算法的基础,考虑到车辆的尺寸和障碍物尺寸等因素,本文提出了外扩凸包的概念:设车辆的宽度为w,由障碍物凸包的各顶点,分别沿各自两条邻边的外角平分线方向向外扩展k 的距离(k>w),所形成的新的凸包多边形,即为外扩凸包,其中k 为外扩系数。本文首先生成障碍物的外扩凸包,然后基于外扩凸包的顶点确定路径关键点。
如图3 所示,假设障碍物存在于原路径L1上 pa、 pb之间。因为,避障路径只能位于原路径的同一侧,因此在生成一条避障路径时,只需考虑位于原路径一侧的外扩凸包顶点,现将位于L1的某一侧的顶点记为 p1… pn。
如果将 p1… pn全作为路径关键点,则生成的路径如图3 中路径L2,过于弯曲,不符合实际。本文按下述方法对 p1… pn进行挑选,使得所生成路径如L3所示,更加自然逼真。
以 pa点为原点,以原路径L1在 pa的切向量方向为x 轴正向建立局部坐标系。设原路径L1的曲线方程为 f ( x,y)=0,分别从 pa, pb向障碍物外扩凸包的各顶点引切线,可得切线斜率kia和 kib, 其中1≤i ≤ n 。显然,无论凸包形状如何,都会存在这样的两个点 ps和pt,它们在原路径曲线的同一侧, ps先于或等于 pt且斜率ksa, ktb的绝对值分别为最大。即满足下面条件:
(1) s ≤ t;
(2) f ( xs,ys)⋅ f(xt,yt)>0;
将 ps、 pt两点选入控制点集,若它们之间存在其它点 pj,s ≤ j ≤ t,由凸包性可知,其一定在 ts pp 连线的外侧(远离障碍物的一侧),则 加入控制点集,直到控制点集为最大。依次以这些控制点为关键点,可以生成一条样条曲线路径。
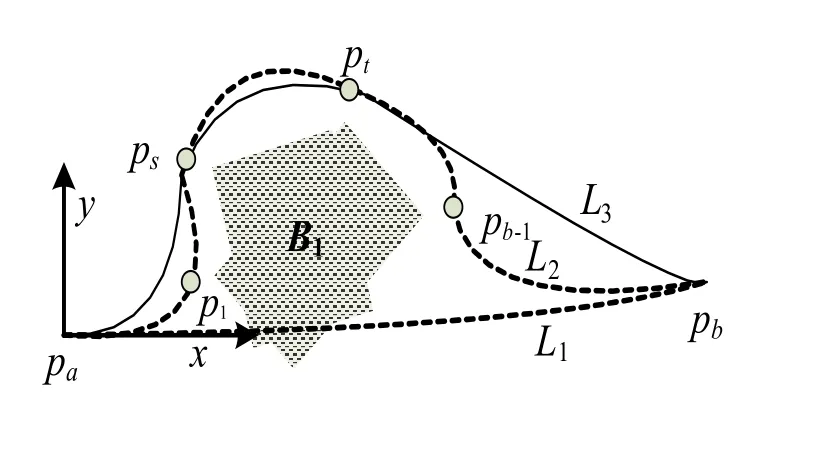
图3 路径关键点的选择
2.2 生成候选路径
为了保证与原路径的G1连续,本文以新路径与原路径连接点处的切向量 p'a、 p'b作为边界条件,可以得到矩阵表达式[5]

从而得到各Hermite 曲线段的端点约束,即得到样条曲线路径。

三次Bézier 曲线需要4 个控制点,因为三次参数样条曲线具有几何不变性和局部性,本文用如下方法来确定控制点(如图4 所示):

图4 第一段曲线的改进
(1) 局部坐标系的建立同2.1;

(3) 依次以 Pa、 A1、 A2、Ps为控制点,形成控制多边形,则生成的Bézier 曲线不会超出控制多边形的区域。
由Bézier 曲线的端点性质可知, Pa、 Ps两点处的切向量方向不会发生变化,故可以保证路径的G1连续。bp 点可用同样方法处理。
2.3 确定避障路径
该算法未考虑避障路径上存在障碍物的情况,针对该情况,可以将新障碍物的外扩凸包顶点加入到预选顶点中来,然后再应用该算法,找出避障路径。
3 实验和应用
本算法在某军的三维战场仿真决策系统中得到应用,如图5 所示。图中原路径C1上存在障碍物,C2为避障路径,仿真效果良好。

4 总结与展望
本算法在基于物理模型的基础上,利用三次参数样条曲线生成避障路径,可以保证新生成路径本身的C2连续性和与原路径的G1连续;在计算插值点三维坐标时,只关心车辆的x 和y 坐标,至于车辆的高度信息(z 坐标值),可以在具体的应用中实时获取地面信息,保证车辆随时紧贴地面运动即可;障碍物位于pa, pb中点位置附近时,避障路径生成效果最好,所以本算法与合适的障碍物检测算法配合能达到较好的仿真效果。
[1] 吴风光, 丛 爽. 自动避障中的一种路径生成、选择与实现[C]//自动化理论、技术与应用. 2002: 63-68.
[2] 刘晓平, 曹 力, 张 静. 物体运动路线多样化模拟[J]. 工程图学学报, 2007, 28(3): 39-43.
[3] 包 晔. 样条插值在运动模拟中的应用[J]. 杭州师范学院学报(自然科学版), 2004, 3(5): 373-377.
[4] 赖舜男, 吴学礼, 汪国平. G2三次Hermite 样条曲线形状的交互修改[J]. 计算机应用研究, 2004, (10): 106-109.
[5] 唐泽圣, 周嘉玉, 李新友. 计算机图形学基础[M]. 北京: 清华大学出版社, 1995. 78-87.
[6] 银红霞, 杜四春, 蔡力军. 计算机图形学[M]. 北京:中国水利水电出版社, 2005. 130-159.
