煤矿直流架线电机车仿真分析
2009-09-05王新鹏刘伟韬刘晓磊刘晋杨倩
王新鹏 刘伟韬 刘晓磊 刘 晋 杨 倩
摘要:本文对煤矿直流架线电机车进行了仿真,并给出了仿真结果。
关键词:煤矿 直流架线电机车 仿真
0 引言
煤矿直流架线式电机车额定电压一般采用550伏。运力较小、运距较短时,可采用250伏,地面长距离运煤时,经技术经济比较,也可采用750伏。仿真采用ZQ-24型电机,其额定电压为550V,工作于小时制,额定电流50.5A,额定转矩39Kg*m,额定转速600rpm。
1 直流电源的获取
交流电能要以直流电能的形式提供给架线电机车,整流是必须的技术环节。晶闸管、二极管整流器由于功率因数低,谐波污染严重,已经不适于在大功率场合的直接应用。PWM整流器可以在满足直流负载正常工作的同时使交流侧的功率因数为1。如果直流侧负载需要改变电压,如直流电机的变压调速等场合,可以用斩波器将PWM整流器的直流侧电压变成需要的负载所需的电压。在本论文的仿真中,假设PWM整流器的直流侧电压可以保持稳定,以至于可以用一个直流电压源来代替。
2 起动电阻的选择
串电阻起动的目的就是减小起动时的电流冲击。起动时,电机转速为0,电枢反电动势还没有建立,需要在电枢回路中串联一定阻值的电阻,起到分压作用,从而减小电枢电流。所串电阻大小要满足起动电流的要求。选取最大起动电阻为7Ω。如果忽略电枢和励磁电阻,则起动电流为550/7=78.6A,不到额定电流的2倍,是基本可以承受的。
3 控制系统设计
仿真采用ZK7-10的起动控制方法,即双电机先是串联,串电阻起动,再变换成并联。在起动控制中一个关键的问题是控制时间的确定。虽然是顺序控制,可是相邻状态之间的时间间隔都需要合理设计。仿真中所用的状态时间值都是根据减小电枢电流和缩短电机起动时间的原则设计的。使用升压型斩波器改变电机电压,形成调压控制。为了是电机转速能够跟随给定,对电机转速采用闭环控制,控制变量为斩波器的开关占空比。
4 仿真结果
仿真采用串电阻起动的方法,设计起动时间为2秒。2秒之后进行调速,调速过程中负载转矩发生阶跃变化。仿真主要观察电机转速和电枢电流变化情况。
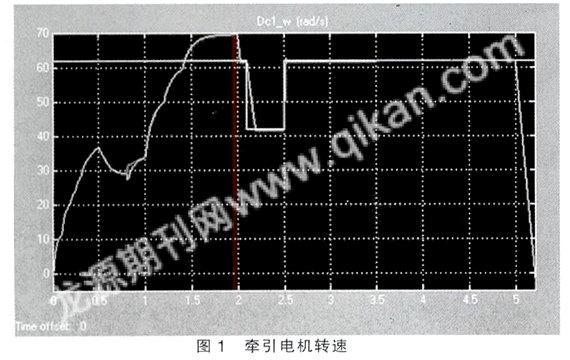
4.1 电机转速波形(见图一) 0~2s是电机的起动阶段。2s之后对电机进行调速,可以看出转速可以很好的跟踪给定值。5s时电机能耗制动,转速也直线下降到0。另一个值得注意的是,两个直流电机的转速基本相同,其大部分时间是重合的,只是在0.8s时有一点差异,这是因为此时其中一个电机被短路掉了。两电机转速相同的条件是他们的参数完全相同。

4.2 电枢电流波形(见图二、图三) 由电流及转矩波形显示,起动电流限制在70A以内。3~3.5s时间内负载转矩的阶跃变化使电机的电枢电流和电磁转矩也发生相应的阶跃变化,以适应负载。对比转速波形和电流波形可以明显看出,由于采用速度闭环调节,当负载发生扰动时,系统自动通过调压的方式使转速稳定在给定值,而不会因为负载的变化而变化。
