机器视觉技术在岸边集装箱起重机下集卡对位系统中的应用
2009-08-21同宁方黄秀松张志勇
同宁方 黄秀松 张志勇
0引言
随着信息技术的发展和普及,数字图像处理技术广泛应用于军事、医学诊断、工业监控等领域。智能化的集装箱码头闸口系统的核心正是基于图像处理的集装箱箱号识别技术的应用。
在传统的集装箱装卸工艺中,集卡在岸边集装箱起重机(以下简称岸边吊)下等待装卸集装箱的位置,是由桥边指挥员通过在岸边吊下方设置标识或观察吊具下落位置确定的,并由其指挥集卡司机控制集卡停放,使吊具可以准确抓取集装箱扭锁。如有偏差,集卡司机通过回头观察吊具位置,对车辆作前进、后退的调整。实践证明,这样的操作程序不但影响装卸效率,而且增加能源消耗,同时存在一定的安全隐患。
近年来装卸机械技术水平不断提升。双40英尺吊具的岸边吊对集卡的停放要求更高,不但要求集卡在岸边吊下方停放的位置非常准确,而且对相邻集卡的位置调整提出要求。例如,相邻集卡上2个相邻箱的箱沿锁孔经常由于集卡停放位置不正呈现“正八字”或“倒八字”,集卡司机为调整位置需要花费大量时间,双40英尺岸边吊的技术优势因此被抵消。诸如此类的问题导致双40英尺岸边吊的装卸操作难度远高于单吊具岸边吊。正是在这样的背景下,本系统创新性地将机器视觉技术运用在二维平面内的目标辨识、目标跟踪和目标位移测量计算中,以解决这一装卸工艺难题。
1系统设想及目标
针对在这一应用领域存在的问题,采用数字视频处理技术,基于机器视觉技术,研发岸边吊集卡对位系统。这套系统适用于不同箱型,不但能迅速、准确地确定集卡停放位置,而且能测量停放的集装箱的前后沿间距,将这些信息提供给岸边吊司机,并引导集卡司机严格控制其驾驶车辆与相邻集卡的相对位置。在进行视觉检测时,目标辨识准确,不受非正常工作车道过车的干扰。此外,系统可将测得的数据提供给岸边吊运动控制PLC,由PLC控制吊具间距姿态,使吊具间距自动与并列箱位置间距相吻合,从而实现自动调整。
2系统工作原理
2.1原理简介
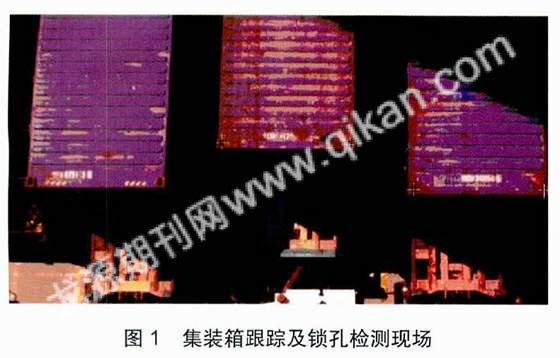
本系统利用高清晰智能数码摄像机,实时捕捉在岸边吊下方行驶的集卡装载的集装箱,运用特征提取等图像处理技术,精确锁定集装箱锁孔位置,并进行行驶轨迹跟踪(见图1)。系统虚拟内置平面直角坐标系统,将锁孔的位置运算成二维平面坐标,通过对坐标点的连续运算,得出行驶位置及行驶轨迹。
中央处理单元按照一定逻辑,将归一化后的位置信息发送给安装在不同位置的LED显示屏。需要提供给岸边吊司机的集装箱间距信息,通过无线通信模块传输给岸边吊驾驶室无线车载终端,并以人性化的界面提示给集卡司机。
系统具体工作过程如下:岸边吊作业路确定之后,车道选择单元将集卡的车道信息、行驶方向和箱型信息发送给中央处理单元;中央处理单元按照系统设计的逻辑,通知检测当前使用车道的摄像机进行工作,并将实时检测数据发送给中央处理单元;摄像机得到工作指令后,视频检测系统开始逐帧检测跟踪下方车道内的集卡运行状态,摄像机连续不断地发送坐标信息给中央处理单元;中央处理单元处理这些坐标点,将其转换成岸边吊司机和集卡司机需要的距离信息,然后控制不同的通信单元,将信息分别发送给岸边吊司机和集卡司机。
2.2系统逻辑控制原理
本系统的逻辑控制原理如图2所示。

2.3基于差影法的集卡定位
利用图像捕捉并跟踪运动目标在许多领域有广泛的运用。目标的运动图像序列为低信噪比情况下的目标检测提供比目标静止时更多的有用信息,利用图像序列可以检测出单帧图像中很难检测出的目标。由运动目标形成的图像序列可以分为2种:一种是背景静止的,另一种是背景变化的。摄像机处于相对静止状态时通常产生前一种图像,摄像机处于相对运动状态时通常产生后一种图像。对于图像的处理方法,一般是采用突出目标或消除背景的思路,对前一种图像的处理可以采用消除背景的方法,对后一种图像的处理比较复杂。岸边吊作业时,摄像机相对于岸边吊是静止的,而集卡是运动目标,因此本文不考虑后一种。
将同一背景不同时刻的图像进行比较,可以反映运动物体在此背景下运动的结果。简单的比较方法是将图像作“差分”或“相减”运算,从“相减”后的图像中很容易发现运动物体信息。
在“相减”后的图像中,灰度不发生变化的部分被减掉(包括大部分背景和一小部分目标)。若背景比目标灰度低,则前区为正,后区为负,其他部分为零。通过检出的部分可以大致确定运动目标在图像上的位置,使用相关法缩小搜索范围。
在集卡对位系统中,通过高清晰的网络相机,不停地采集视频图像并保存到内存,形成动态的视频流。通过比较相邻2帧的视频数据,可以准确地定位图像中的集卡。
3系统性能分析
研发后期,在实际工况下对本系统进行功能、效能、效率等方面的测试。功能测试主要测试在不同集装箱、不同行驶轨迹、不同装卸流程等条件下,系统在装卸过程中对于现场工况的满足性;效能和效率测试主要测试运用本系统进行的装卸作业,相对于传统岸边吊装卸作业的工艺变革以及效率提高的具体程度等。
装卸效率提高的程度可以通过实际工况下装卸作业与传统装卸作业的装卸耗时、集卡到位准确率等统计数据进行对比得到。表1列出在某一时段内,人工对位耗时、准确率统计与自动对位耗时、准确率的对比。表2是针对表1数据的统计与分析。
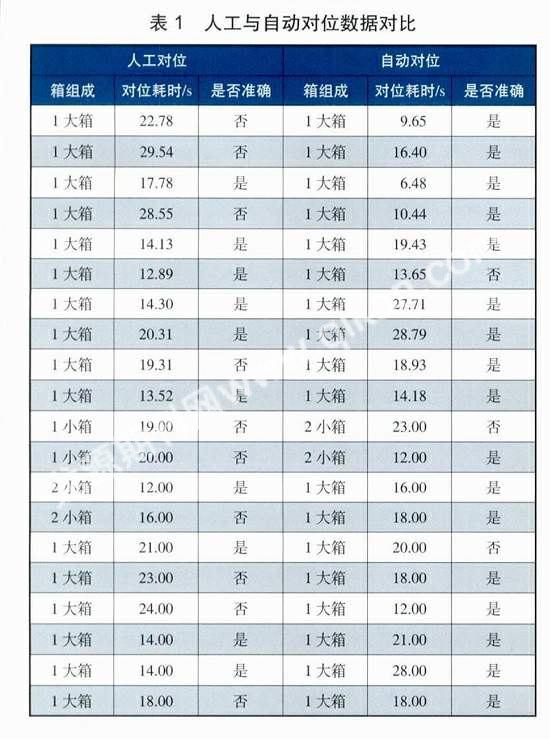

表1和表2中的数据及统计分析取自某一工班时段内,正常工况情况下,同一岸边吊,同一岸边吊驾驶员的作业记录统计表。从表2的数据分析中可以发现,运用本系统后,岸边吊装卸效率明显得到提升。
4结束语
经过对上海洋山深水港区3期A标码头的102号双40尺吊具岸边吊的多批次作业测试后发现,该系统大幅度减少作业时间。根据模拟测试,在集卡驾驶员熟悉本系统的情况下,对位准确率可以达到98%以上,平均作业时间减少到左右。相信随着系统的大规模投入使用,系统将得到不断优化和完善,并产生巨大的经济效益和社会效益。
参考文献:
[1] 冈萨雷斯. 数字图像处理[M].2版. 阮秋琦,译. 北京:电子工业出版社,2006.
(编辑:吴磊明收稿日期:2009-05-19)
