经济高效的矢量控制驱动(上)
2009-05-21PavelSustek
Pavel Sustek
摘要:本文描述了基于飞思卡尔MC56F8013/23数字信号控制器的三相AC感应电机矢量驱动解决方案。
关键词:交流感应电机;矢量控制驱动;MC56F8013/23;单旁路电流传感
简介
由于能效、环境问题及遵守新的能耗规定的必要性,对节能型工业和家用电器的需求最近也在攀升。这些规定迫使人们为洗衣机、空调压缩机系统和风机等电器开发节能电机。据估计,电动机消耗的电力占工业应用消耗的总电力的70%以上,美国电力研究协会研究显示,超过60%的工业电机以低于它们的额定负荷容量运行。
交流感应电机(ACIM)在工业和消费电子中的流行有很多原因(见图1)。它们非常简便(它们没有刷子),不但制造成本低,而且功能强大,几乎不需要维护。它们的生产已经有一些年头,因此它们的构造极度优化。在过去,这类电机的运行一直不需要速度控制,而且为了达到理想的结果而频繁启动和停止。这一过程使用的大约50%的电力都被浪费。
现在,人们在考虑很多新的减少ACIM的电力消耗的方法,包括新的电机效率技术。利用模拟电机电路的数字控制,系统成本和功耗可以大大降低。本文描述了基于飞思卡尔MC56F8013/23数字信号控制器(DSC)的三相AC感应电机矢量驱动解决方案,为消费和工业电机驱动充分利用经济高效的解决方案的优势。

三相交流感应电机
ACIM是旨在从三相交流电源中运行的旋转电机。每个定子的内部外设中的插槽都包含一个三相绕组。每个绕组中的顺序都进行分配,这样定子绕组中的电流就在气隙的外设周围产生一个近似正弦曲线分布的磁通密度。当时间呈正弦曲线分布、但又以120度交错放置在相位中的三个电流流经三个对称放置的绕组时,就会产生放射状气隙绕组磁通密度,它们也呈正弦曲线分布在气隙周围,以相当于定子电流角频率的角速度旋转。
最常见的感应电机类型有一个鼠笼转子,其中,铝导线或铝条铸入转子外设的插槽中。转子的两端均使用铸铝端环形成铝导线或铝条短路,铸铝端环也可用作风机。因为正弦曲线分布磁通密度波由定子励磁电流掠过转子导线产生,所以在导线中产生电压,最终产生短路转子条中的正弦曲线分布电流。因为这些短路铝条具有低电阻,所以只要求磁通波的角速度和两极转子的机械角速度之间的相对较小的角速度来生成必要的转子电流。相对角速度叫作滑流速度。正弦曲线分布的气隙磁通密度和感应转子电流间的交互生成转子上的扭矩。
AC感应电机的矢量控制
为了实现三相AC感应电机中的可变速度运行,必须为电机提供可变电压和可变频率。现代三相可变速度驱动(VSD)都配有数字控制的开关逆变器,可以极大地降低系统总功耗。使用可变速度驱动可以节省最多60%的电力,资源利用率可以提高三到四倍,能够实现以前不可能实现的功能。可变速度驱动的功率范围在电冰箱压缩机中为0.2~0.4kW,在洗衣机中为0.8-1kW,在住宅和公共服务的电气驱动中(例如多层住宅的冷水和热水泵、中继线中的冷水管道等)为3~100kW。
控制算法可以分为两大类。第一类是标量控制,恒定电压/频率控制是非常流行的控制方法。另一类是矢量或磁场定向控制(FOC),矢量控制方法能够提供比标量控制更高的驱动性能。FOC的优势包括更高效率、完全扭矩控制、磁通和扭矩控制分离、动力学改进等。
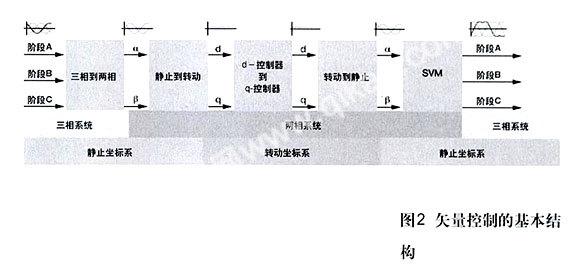
FOC算法的基本理念是将定子电流分解为生成磁通的部分和生成扭矩的部分。两个部分可以在分解后分别控制。这样,电机控制器的结构就与分别激振的DC电机的结构一样简单。图2显示了AC感应电机的矢量控制的基本结构。
要执行矢量控制,必须采取以下这些步骤:
·测量电机参量(相位电压和电流);
·使用Clarke转换,把它们转换成二相系统(α,β);
·计算转子磁通空间矢量幅值和位置角度;
·使用Park转换,把定子电流转换成d—q参考帧;
·分别控制生成定子电流扭矩(isq)的部分和生成磁通(isd)的部分;
·使用去耦模块计算输出定子电压空间矢量;
·使用Park逆转换,转换定子电压空间矢量,把d-q参考帧转换回用定子固定的二相系统;
·使用空间矢量调制(SVM),生成输出三相电压。
要把电流分解为生成磁通的部分和生成扭矩的部分(isd、isq),我们需要知道电机磁通的位置。这需要与转子连接的速度或位置传感器传感准确的速度信息。增量编码器或解析器被作为矢量控制驱动的位置传导器使用。在成本敏感的应用中(如洗衣机),测速发电机被广泛采用。然而在有些应用中,并不需要使用速度/位置传感器。目的并不是直接测量速度/位置,而是采用某些间接方法,估算转子位置。那些没有采用速度传感器的算法被称为“无传感器控制”。
矢量控制算法描述

已实施的控制算法的概述框图请见图3。与其他面向矢量控制的方法一样,它能够分别控制感应电机的励磁和扭矩。控制的目的是为了调节电机速度,速度命令值由高级控制进行设置。该算法在两条控制回路中实施,快速内部控制回路实施采用125μs周期,慢速外部控制回路的实施采用1毫秒周期。
为了实现感应电机控制,该算法使用一组馈入信号。基本馈入信号是DC总线电压、三相定子电流,它们是从DC总线电流和电机速度重构而来。为了实现正确操作,控制结构要求电机轴上有速度传感器。在提供算法的情况下,使用增量编码器。
快速控制回路实施两个独立电流控制回路,它们是直轴和正交轴电流(isd、isq)PI控制器。直轴电流(isd)用于控制转子磁通,正交轴电流(isq)对应电机扭矩。电流PI控制器的输出用去耦定子电压的相应d和q轴部分进行汇总,这样我们就获得了应用于电机的定子电压的理想空间矢量。快速控制回路执行所有必要任务,支持定子电流部分的独立控制。这些功能模块包括:
·三相电流重构;
·前向Clark转换;
·前向和后向Park转换;
·转子磁化通量位置估算;
·DC总线电压波动消除;
·空间矢量调制(SVM)。
慢速控制回路执行速度和磁场弱化控制器和低优先级控制任务。PI速度控制器输出为生成定子电流的正交轴分量(isq)的扭矩设置参考。生成定子电流的直轴分量(isd)的磁通参考由磁场弱化控制器设置。自适应电路纠正转子时间常量,最大限度地减少转子磁通位置估算的错误。(本文第2部分本刊下期刊出)
