轻型客车直行跑偏仿真和试验
2009-04-21王正国
王正国
摘 要:为解决轻型客车的直行跑偏问题,以国产某轻型客车为研究对象,将各个部件之间作为刚性连接,车身用等效的集中质量简化处理,在MSC Adams主模块Aview基础上,结合相关的轮胎模型和路面模型,建立具有12个自由度(Degree of Freedom,DOF)的动力学仿真模型. 实车试验与仿真分析的比较说明该模型具有较高的准确度和有效性. 仿真分析同时揭示轻型客车的直行跑偏与前轮各定位参数之间的关系,为快捷查找造成车辆直行跑偏的关键因素和解决方案提供依据及相应对策.
关键词:轻型客车;直行跑偏;悬架系统;转向系统;MSC Adams;Aview
中图分类号:U463.3;U463.4;U461.1
文献标志码:A
Simulation and test on off-tracking from line of light bus
WANG Zhengguo
(Shanghai Huizhong Automotive Manufacturing Co.,Ltd.,Shanghai 201204,China)
Abstract:To solve the problem of off-tracking from line of light bus,a domestic light bus is taken as the study object. The components are linked rigidly,the body is considered as a simple mass and a 12 Degree of Freedom (DOF) dynamical simulation model is set up based on MSC Adams package Aview in which tyre model and road model are combined. The comparison of real vehicle test and simulation shows that the model is more valid and effective. The simulation also shows the relationship of off-tracking from line and position parameters of front tires and provides the basis and corresponding countermeasure for vehicle to find the key factors and solutions on off-tracking from line quickly.
Key words:light bus;off-tracking from line;suspension system;steering system;MSC Adams;Aview
0 引 言
轻型客车一般采用前轮驱动,其转向驱动桥在保证汽车转向功能的同时,应使转向轮具有自动回正功能,以保证汽车稳定直线行驶.即当转向轮偶遇外力作用发生偏转时,一旦作用的外力消失后,应能立即自动回到原来直线行驶的位置.[1]这种自动回正特性由转向轮的定位参数保证,也即转向轮、主销与前轴之间的安装应具有一定的相对位置——转向轮定位.无论是由制造装配公差还是由使用造成的定位参数变化对车辆的直行特性均有重要影响.笔者结合工程实际,提出1种解决车辆跑偏特性的技术路线和方法.
1 整车悬架结构特性分析
1.1 前悬架结构分析
某轻型客车前悬架为扭杆梁式双横臂独立悬架,主要由下横臂、上横臂、扭杆梁减振器、转向节、转向节臂和转向拉杆等构成,其中:减震器下端支座与下横臂通过转动副连接,减震器上端支座与车架也通过转动副连接;扭杆梁一端与上横臂在靠近车架1侧固结在一起,另一端则固定在车架上,其结构见图1.需要说明的是,本悬架结构没有主销的实物结构,而是通过上下球铰的空间位置确定主销的外倾角和后倾角等定位参数.此外,由于扭杆梁所起到的扭杆弹簧作用,可以省去传统悬架所采用的螺旋弹簧,因其结构简单、布置方便而节省大量空间.


图 1 扭杆梁式双横臂独立悬架结构
1.2 后悬架结构分析
后悬架为带减振器的钢板弹簧非独立悬架,结构较为简单,主要由钢板弹簧(单片)、钢板弹簧钓耳和减振器等构成;钢板弹簧一端通过转动副连接在车架上,另一端通过钓耳连接在车架上;减振器两端通过转动副分别连在后桥和车架上,其结构见图2.由于后悬架钢板弹簧只有1片板簧,因此为了增加后悬架的阻尼特性,本结构中采用减振器,这是与一般钢板弹簧非独立悬架的不同之处.钢板弹簧可以起到导向作用.


图 2 带减振器的钢板弹簧非独立悬架结构
2 整车MSC Adams动力学模型建立
为了分析此轻型客车前轮定位参数与车辆直行跑偏特性之间的关系,必须建立整车的多体动力学模型.借助模型计算分析车轮定位参数对车辆直行跑偏特性的影响,找到影响跑偏特性的主要因素并提出相应对策.
2.1 整车动力学建模所需的结构和力学特性参数
为了建立准确的动力学模型,必须首先获得整车参数和悬架参数.其中,整车参数又包括力学特性参数和空间结构位置参数,主要是质心位置坐标、轮距、轴距、整车质量和转动惯量等参数;悬架参数主要包括悬架各个关键点位置参数、各个构件之间连接副关系以及弹簧和减振器等的力学特性参数等.在研究过程中,上述所有参数均来自某国产轻型客车,具有较高的可信度和准确度.
2.2 整车各部件约束关系分析
在确定整车参数和悬架关键点位置参数后,还须建立前、后悬架及整车各部件之间的约束关系[2].图3和4分别为前悬架系统和转向系统约束关系.
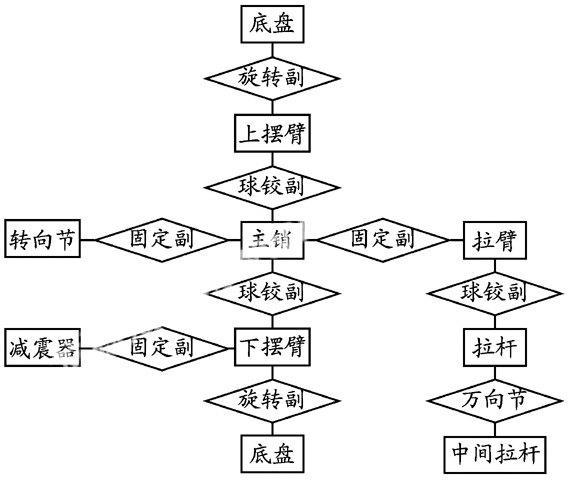
图 3 前悬架系统约束关系ER图
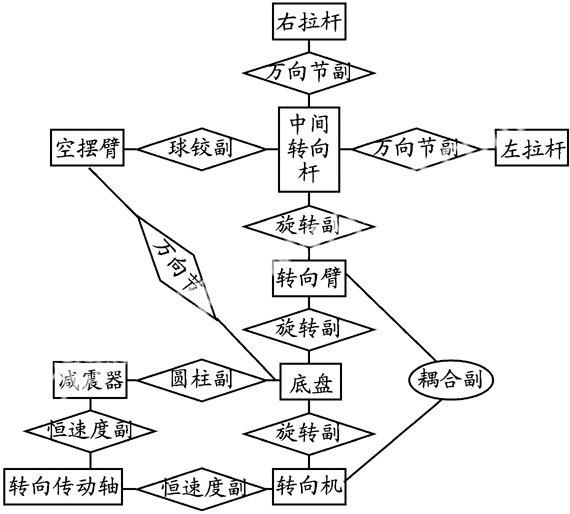
图 4 转向系统约束关系ER图
2.3 整车MSC Adams动力学模型建立
在上述分析基础上建立某轻型客车的整车MSC Adams动力学模型[3].与此同时,考虑到所能提供参数的实际情况,在具体建模过程中忽略弹性衬套对系统动态特性的影响,即各个部件之间是刚性连接.车身用等效的集中质量简化处理,其质量和转动惯量等惯性参数来自真实的目标车辆,最终建立的模型见图5.该模型在MSC Adams主模块Aview基础上结合相关轮胎模型和路面模型建立而成,具有12个自由度,具体包括车身3个位移自由度和3个转动自由度,4个车轮的4个转动自由度,以及转向轮的2个转动自由度.
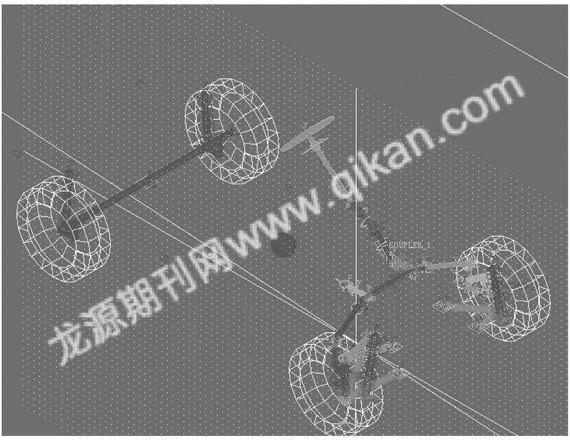
图 5 整车MSC Adams动力学模型
上述建立的整车MSC Adams多体动力学模型为进一步分析前轮定位参数对车辆直行跑偏特性创造有利条件.
3 前轮定位参数对车辆直行跑偏特性仿真分析和试验
为了深入研究此轻型客车的直行跑偏特性,重点分析前轮定位参数(包括主销外倾角和后倾角、轮胎外倾角和前束角)对直行跑偏特性的影响,找出严重影响车辆直线行驶特性的因素.另外,为了更加贴近实际情况和有效验证整车MSC Adams多体动力学模型,还进行相对应的试验研究,见图6.

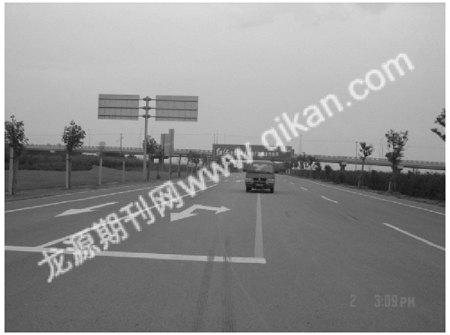
图 6 车辆直行跑偏特性道路试验
3.1 仿真结果与试验结果对比
利用上述建立的轻型客车12自由度多体动力学模型进行仿真分析时,设定方向盘处于自由状态,获得在前轮初始定位参数条件下的跑偏特性.如图7所示,横坐标为时间历程,纵坐标为车辆行驶过程中的横向跑偏量.同时,为了验证整车MSC Adams动力学模型的正确性和有效性,必须将试验结果与仿真分析模型有效结合进行联合分析.具体过程如下:首先,通过实车试验获得保证车辆直线行驶所需的方向盘力矩输入信号;之后将试验获得的力矩信号作为输入在MSC Adams环境下进行车辆直行跑偏特性的仿真分析,获得的结果见图8.对比图7和8可以发现,在方向盘自由状态下比力矩输入状态下的跑偏要严重许多,这与实际情况完全一致,说明所建模型具有较高的准确度和有效性.
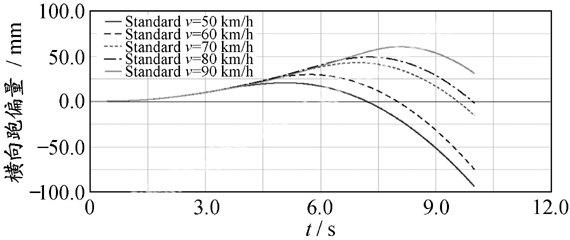
图 7 车辆不同车速对应的跑偏特性分析(方向盘自由状态)
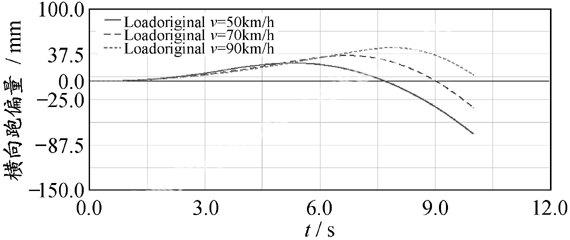
图 8 车辆不同车速对应的跑偏特性分析(方向盘力矩输入状态)
3.2 车辆直行跑偏特性对策
通过仿真分析,发现轻型客车的直行跑偏与前轮各个定位参数均有密切关系,因此可以通过有效控制车轮的定位参数来减弱甚至消除车辆的直行跑偏特性.通过对整车MSC Adams动力学模型大量的试验设计研究,发现主销后倾角和内倾角、车轮前束角和外倾角等定位参数对车辆直行跑偏特性均有较大影响,但是其相对于前束角变化的灵敏度最大,所以选取前束角为主要控制对象而以其余定位参数作为辅助控制对象来减缓车辆的直行跑偏特性.仿真分析结果见图9.
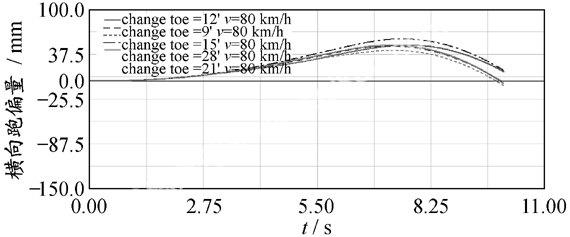
图 9 前束角变化与车辆直行跑偏特性的关系
4 结 论
通过上述分析,可以得到以下结论:
(1)控制车轮前束角的值可以有效减缓车辆的直行跑偏特性,且左右两侧车轮的前束角要有一定差值;前束角控制在0°15′时,可以使跑偏量最小;
(2)只有保证车轮各个定位参数的有效匹配,才能缓解甚至消除车辆的直行跑偏特性;
(3)将仿真与试验相结合,可以更为快捷地查找造成车辆直行跑偏的关键因素,为制定解决方案提供依据.
参考文献:
[1] 郭孔辉. 汽车操纵稳定性[M]. 长春:吉林人民出版社,1983.
[2] 洪嘉振. 计算多体系统动力学[M]. 北京:高等教育出版社,1999.
[3] 郑建荣. Adams——虚拟样机技术入门与提高[M]. 北京:机械工业出版社,2002.
(编辑 廖粤新)
