时间统一系统同步误差测量方法研究
2009-04-12涂文杰谭显春
涂文杰 杨 雷 谭显春
1中国舰船研究设计中心,湖北 武汉430064
2海军驻大连船舶重工(集团)有限责任公司军事代表室,辽宁 沈阳116001
时间统一系统同步误差测量方法研究
涂文杰1杨 雷2谭显春1
1中国舰船研究设计中心,湖北 武汉430064
2海军驻大连船舶重工(集团)有限责任公司军事代表室,辽宁 沈阳116001
传统的人工时间同步误差的测量方法存在操作复杂和效率低下的缺点。为解决这些问题,提出一种同步误差的测量方法,该方法基于复杂可编程逻辑器件(CPLD)技术,并利用全球定位系统来测量时间统一系统的同步误差。相对于传统的测量方法,该方法显著提高了同步误差测量的智能化程度,减轻了测试人员的工作量。通过实验,验证了本设计方案的可行性及正确性。
时间统一系统;全球定位系统;可编程逻辑器件;同步误差
1 引言
时间统一作为信息化战争中实现战场态势感知共享[1]的前提条件,在舰载作战系统[2]、编队指挥系统中起着日益重要的作用,时间统一系统已经成为信息化战争中的重要保障设备,在舰载作战系统中发挥着重要作用。
时间同步误差是时间统一系统[3,4]中最为关键的技术指标之一,它直接反映时间统一系统的效能。传统的时间统一系统时间同步误差的测量是利用GPS接收设备产生基准脉冲信号,利用高精度示波器与被测脉冲信号进行比对,测试人员通过主观判断,人工记录其时间同步误差值。一方面测试设备数量多操作复杂;另一方面在大批量测试时,需要逐个测试、分类和统计,工作量较大。因此需要研究一种使用简便、智能化程度高的测量系统。
本文提出了一种集成全球定位系统(GPS),并采用复杂可编程逻辑器件实现的时间统一系统同步误差测量系统。
2 全球定位系统
全球定位系统[5,6]是美国于1993年全面建成并运行的新一代卫星导航、定位和授时系统。本方法主要是利用GPS的精确授时的特点。
GPS接收器采用美国 GARMIN公司推出GPS OEM板。它采用+5 V电源供电。有12通道,最多可同时跟踪12颗卫星,如果打开秒脉冲,可同时跟踪11颗卫星。它自动捕获卫星信息的时间小于2 s,热启动时间约为15 s(初始化位置和时间已知),冷启动时间约为45 s(初始化位置和时间已知)。NMEA0183信息更新输出间隔从1 s到900 s可设定,RS-232输出,比特率从300~38 400 bps可选。GPS25LVS模块在任意时刻能同时接收其视野范围里4~11颗卫星信息,其内部硬件电路和软件通过对接收到的信息进行解码和处理,能从中提取并输出两种时间信号:1)间隔为1 s的秒脉冲信号1PPS;2)经串行口输出的与1PPS脉冲前沿对应的协调世界时(UTC)和日期代码。若以1PPS信号和协调世界时作为基准时间分别与时间统一系统的时码信息和秒脉冲信号进行比较,便可以得到时间统一系统的时间同步误差。
3 复杂可编程逻辑器件及Quartus II开发平台
时间统一系统时间同步误差达到微秒级,而单片机对时间的分辨能力很低,不能满足时间同步误差的测量精度要求。因此,本设计选用ALTERA公司的MAXII系列复杂CPLD[7,8]。其高性能和高密度是基于它先进的多重阵列矩阵架构。它采用E2CMOS工艺制作,传播延迟最小为3.5 ns,可以实现速度高于200 MHz的计数器。如果选用50 MHz的时钟信号,时间同步误差测量精度达到20 ns。完全满足时间统一系统的测量精度要求。ALTERA公司推出的QuartusⅡ软件是一款易于使用的开发工具,其界面友好、集成化程度高、兼容工业标准、支持MAXⅡ等系列产品。CPLD要实现的逻辑功能一般是在QuartusⅡ环境下通过硬件描述语言开发出来的,并能脱离硬件对设计方案进行仿真,在确认逻辑功能正确无误的情况下,通过并行口下载到CPLD中。CPLD在实际应用中有如下优点:
1)以内部连线代替外部器件的连接,降低了噪声干扰,实现了线路互联的较短延时。工作频率最高达到200 MHz。
2)可以在线编程,提高了系统的PCB设计和调试效率。
3)在实际调试前,可由QuartusⅡ开发平台对CPLD的逻辑功能进行仿真,确保了系统逻辑设计的正确性。
4 时间统一系统同步误差测量的实现方案
时间统一系统通过两种时间信号向各种舰载系统授时。一种是时码信息(包括串口时码、网络时码),另一种是秒脉冲信号。时间统一系统同步误差包括时码信息的误差和秒脉冲信号误差。时间统一系统时码信息发送速率较低,通常一秒发送一次。因此可以通过计算机软件来测量时码信息的误差。时间统一系统秒脉冲信号同步误差达到微秒级。因此必须通过硬件实现对秒脉冲信号同步误差的测量。测量系统由计算机、GPS模块、秒脉冲同步误差测量模块组成。测量系统结构如图1所示。
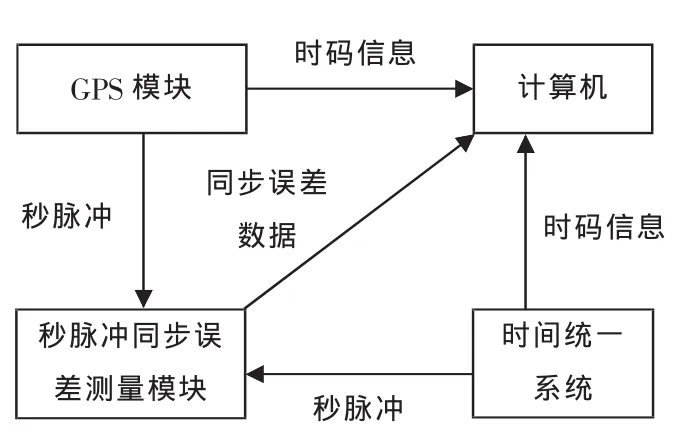
图1 测量系统结构图
4.1 时间统一系统时码信息同步误差测量
利用计算机解读GPS模块输出的报文信息可以得到协调世界时的时分秒信息。报文信息通常使用NMEA-0183[9]格式输出,目前广泛使用V3.0版本,输出的数据代码为ASCⅡ码字符。在NMEA-0183的主要语句中,GPRMC为时间、定位和日期输出语句,其标准格式为:
¥GPRMC,hhmmss.ss,a,ddmm.mmmm,n,dddmm.mmmm,w,z.z,y.y,ddmmyy,d.d,v*CC<CR><LF>
每一项以逗号相隔,其中第一项为格林威治时间的时、分、秒信息;第九项为格林威治时间的日、月、年信息;第二项为定位数据是否有效信息,“A”表示有效,“V”表示警告或者数据无效。计算机通过解读此报文信息便可解算出标准北京时间。同时计算机通过串口或网络接收时间统一系统的时间信息。
计算机以GPS模块输出的时间信息为基准,判断时间统一系统时间信息是否与GPS模块输出的时间信息保持一致。如果GPS模块输出的时间信息与时间统一系统时间信息不一致,计算机自动记录时间同步误差值和超差时刻。
4.2 时间统一系统秒脉冲同步误差测量
时间统一系统秒脉冲同步误差的测量是以GPS秒脉冲信号做为基准信号,通过CPLD进行逻辑运算得到时间统一系统秒脉冲与基准秒脉冲之间的时间差值,然后通过串口发送给计算机。整个过程都在一片CPLD内完成。逻辑电路图如图2所示。
具体工作过程如下:
1)首先将输入秒脉冲做抗干扰处理,实现方法是将GPS秒脉冲信号和时间统一系统秒脉冲信号分别接到D触发器的输入端,用50 MHz时钟信号做为D触发器的时钟信号。用此方法脉宽小于20 ns的干扰脉冲信号将被过滤掉,起到抗干扰的作用。

图2 逻辑电路图
2)经过抗干扰处理后的GPS秒脉冲信号和时间统一系统秒脉冲信号分别接到一个与门和一个或门。即将GPS秒脉冲信号和时间统一系统秒脉冲信号经过或门得到的信号连接到计数器的使能端;GPS秒脉冲信号和时间统一系统秒脉冲信号经过或门得到的信号经过反相器连接到计数器的清零端;将计数器的clk端接入50 MHz的时钟信号;将计数器的输出端接到锁存器的输入端;GPS秒脉冲信号和时间统一系统秒脉冲信号经过与门得到的信号连接到锁存器的clk端。采用上述电路,可以得到GPS秒脉冲信号和时间统一系统秒脉冲信号前沿之间的误差值,通过锁存器的输出端输出。
工作过程分两种情况:第一种情况是GPS秒脉冲信号超前于时间统一系统秒脉冲到来。当GPS秒脉冲前沿到来时,计数器开始计数。当时间统一系统秒脉冲前沿到来时,计数器输出值传递到锁存器的输出端。第二种情况是GPS秒脉冲信号滞后于时间统一系统秒脉冲到来。当时间统一系统秒脉冲前沿到来时,计数器开始计数。当GPS秒脉冲前沿到来时,计数器输出值传递到锁存器的输出端。
3)将GPS秒脉冲信号接到D触发器的输入端;将时间统一系统秒脉冲信号接到D触发器的时钟端。采用上述电路,根据D触发器的输出信号可以判断时间统一系统秒脉冲信号与GPS秒脉冲信号在时间上的前后关系。当D触发器输出为高电平时,时间统一系统秒脉冲信号滞后于GPS秒脉冲信号;当D触发器输出为低电平时,时间统一系统秒脉冲信号超前于GPS秒脉冲信号。
4)由计数器输出信号和D触发器输出信号可以得到时间统一系统秒脉冲同步误差。通过移位寄存器将并行数据转化为串行数据,然后发送到计数器,然后发送到计算机串口。
4.3 软件设计
本系统软件采用Visual C++工具设计,采用Windows XP操作系统做为软件运行平台。系统软件设计采用模块化,主要由外部信息接收部件、信息处理部件、显示部件组成。
1)外部信息接收部件主要功能是通过多个串口分别接收GPS模块时码信息、时间统一系统时间信息、秒脉冲同步误差信息;
2)信息处理模块主要功能有配置参数、同步误差超标判别、处理结果存储等;
3)显示部件提供友好人机界面。
软件结构如图3所示。
4.4 测量结果
我们利用高精度示波器、协议分析仪测量时间统一系统同步误差,对该方案的测量结果进行验证。验证数据如表1所示。
分析表1中的数据可以得到以下结论:
1)本方案时码信息测量结果与协议分析仪时码信息测量结果一致。因此本方案满足时码信息测量要求。
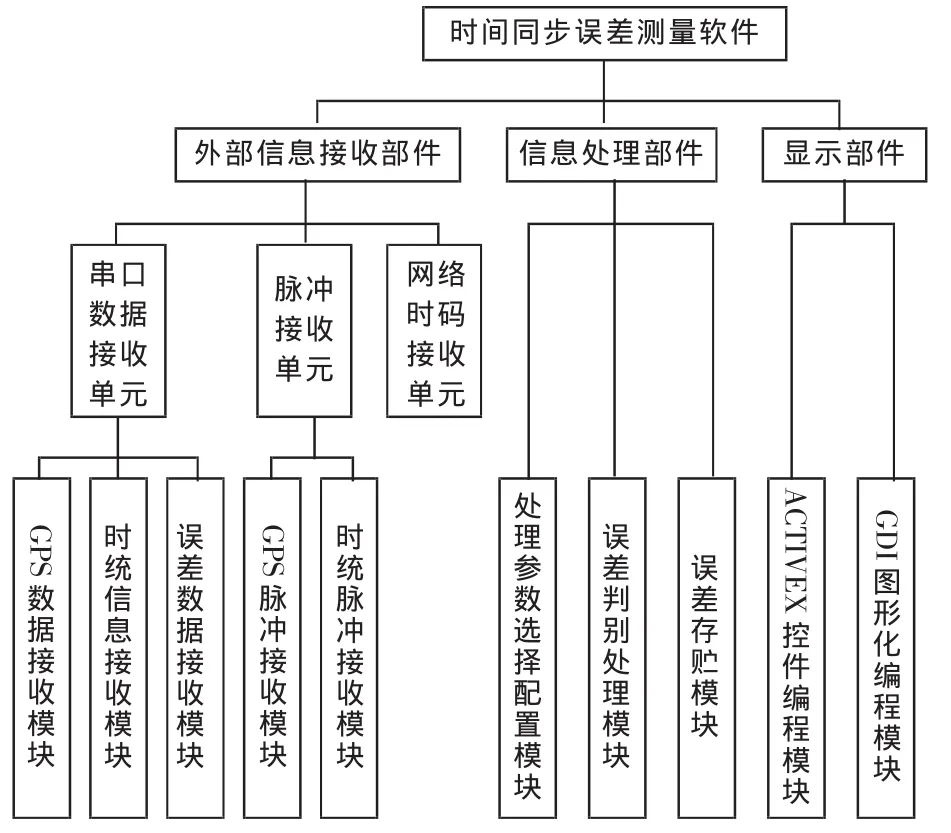
图3 软件体系结构图

表1 验证结果数据表
2)当秒脉冲同步误差为纳秒级时,本方案测量结果偏差在20 ns内。满足秒脉冲同步误差测量要求。
3)当秒脉冲同步误差为微秒级时,由于示波器采样深度限制,测量结果只能精确到微秒。而本方案测量结果精确到纳秒。因此本方案满足秒脉冲同步误差测量要求。
5 结论
本文提出的时间同步精度测量方法显著提高了同步误差测量的智能化程度,减轻了测试人员的工作量。该方法已经成功地应用到自行设计的时间基准测试系统中,效果良好。
[1]肖雪松,宋峻峰,张维明.网络中心战环境中的共享态势感知构建语言研究[J].舰船电子工程,2008,28(3):1-4.
[2]谭显春,陈璇.舰载作战系统时间统一技术构想[J].舰船电子工程,2006,26(6):12-15.
[3]童宝润.时间统一系统[M].北京:国防工业出版社,2003.
[4]周渭,偶晓娟.时频测控技术[M].西安:西安电子科技大学出版社,2006.
[5]李长真.GPS全球定位系统[J].现代物理知识,2000,12(c00):90-92.
[6]张文军.GPS与嵌入式系统软硬件接口及导航信息提取软件[J].计算机工程,2005,31(18):210-212.
[7]王晓峰.可编程逻辑器件及硬件描述语言的EDA方法[J].长春大学学报,2005,15(4):14-16.
[8]赖义汉.基于VHDL逻辑电路设计与应用[J].龙岩学院学报,2006,24(6):43-45.
[9]钱德俊,张哲,胡晨.NEMA0183协议解析[J].电子器件,2007,30(2):698-701.
Measurement of Synchronization Precision for Time-uniform System
Tu Wen-jie1Yang Lie2Tan Xian-chun1
1 China Ship Development and Design Center,Wuhan 430064,China 2 Military Representative office of Dalian Shipbuilding Industry Corporation(Group),Dalian 116001,China
Traditional manual time-synchronization test methods exhibit many drawbacks,such as com鄄plex operations and low efficiency.To overcome these drawbacks,in this paper,we proposed a novel method based on the Complex Programmable Logic Device(CPLD)to measure the synchronization preci鄄sion of the Time-Uniform system by GPS.Compared with the traditional methods,this method significant鄄ly improves the intelligentization of the synchronization precision’s measurement and ease the work loads of testers.Finally,The feasibility and validity of this design were validated through the test by the highprecision oscillograph and the protocol analyzer.
time-uniform system;GPS;Programmable Logic Device;synchronization precision
U674.7
A
1673-3185(2009)06-62-04
2009-05-22
涂文杰(1981-),男,助理工程师。研究方向:舰艇作战系统。E鄄mail:twjsoft@hotmail.com