船舶智能结构振动反馈控制研究*
2007-06-01陈建峰
陈建峰 余 音
上海交通大学船舶海洋与建筑工程学院 上海 200030
船舶智能结构振动反馈控制研究*
陈建峰 余 音
上海交通大学船舶海洋与建筑工程学院 上海 200030
针对船舶结构特点,以压电(PZT)材料作为反馈传感器和控制作动器,粘贴在船舶板梁结构表面,形成智能结构反馈控制闭环系统,使结构振动得到有效控制。从PZT材料的本构方程出发,建立了压电智能结构的传感器、作动器以及振动控制有限元方程,并用ANSYS软件进行了数值仿真研究。数值算例验证了智能结构在结构尺寸和厚度比较大的船舶板梁结构振动控制的可行性,可以给船舶结构振动控制提供一种新的途径。
智能结构 作动器 振动控制 ANSYS 三明治复合材料
20世纪90年代以来,以叠层材料制造技术、微电子和功能材料耦合特性的利用为基础而发展起来的智能结构越来越受到人们的重视[1]。近年在海洋结构工程中,针对处于时变性和不确定性环境中运行的海洋结构,也提出了机敏海洋结构的概念,并展开了有关的研究工作[2-3],船海智能结构的研究将对船舶与海洋结构的健康监测和控制有重要意义。
针对船舶结构,研究压电智能结构对较大尺寸和厚度的板梁结构的振动控制,利用ANSYS软件中的APDL参数化设计语言构造反馈控制系统,对两种典型的板梁结构进行振动控制研究。
1 智能结构的有限元控制方程
1.1 压电材料本构方程
压电方程描述了压电材料力学和电学行为之间的相互作用。压电晶体在弹性极限范围内,由于应变和电位移均可由应力和电场两方面产生,根据弹性结构关系式、介电关系式及压电效应表示式,可以得到压电材料本构方程[4]

式中:{σ},{S}——应力和应变向量;
{D}——电位移向量;
{E}——电场强度向量;
[ε]——介电常数矩阵;
[K]——结构刚度矩阵;
[e]——压电(应力)常数矩阵。
1.2 机电耦合的结构动力学方程
根据Halmilton原理可以推导出含压电材料的智能结构动力学方程[4]
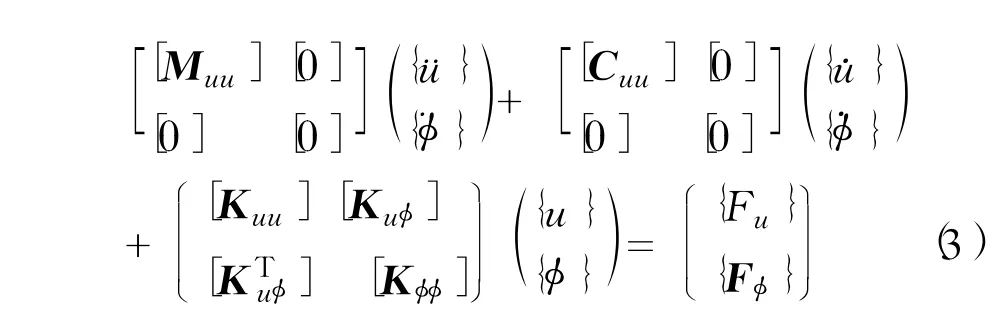
式中:[Muu]——结构质量矩阵;
[Cuu]——结构阻尼矩阵;
[Kuu]——结构刚度矩阵;
[Kuφ]——结构压电刚度矩阵;
[Kφφ]——结构介电刚度矩阵;
{u}——位移;
{φ}——电势;
{Fu}——结构外载荷;
{Fφ}——电极表面电荷产生的载荷矢量。
1.3 传感器、作动器方程及控制方法
利用逆压电效应将复合材料板壳型自适应结构中的压电材料铺层作为作动器,即在压电铺层中作用适当的电压以获得结构变形。作动器方程为[5]

压电材料的直接压电效应使作用在材料上的应变转换为电荷。利用这一性质,含有压电材料铺层的复合材料层板中的压电材料铺层可以设计为传感器。传感器方程为[5]

式中:{δ}——传感器处的结构位移。
采用比例反馈控制和恒值反馈控制两种控制
方法。
比例反馈控制输入电压为

式中:{φs}——传感器处反馈的电势;
[
G]——反馈增益矩阵。
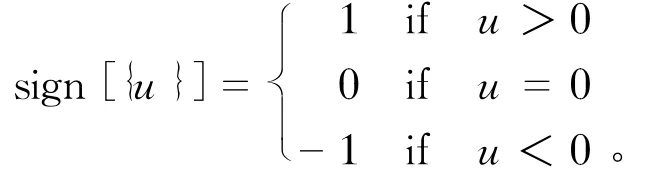
恒值反馈控制输入为

式中:sign[]——符号函数,
1.4 基于APDL的反馈控制有限元仿真系统
在有限元软件ANSYS中建立一个虚拟的试验系统,并构造一个反馈控制系统,控制步骤如下。
1)计算第i个时间步长后的瞬态响应。
2)输出传感器上的电压作为反馈信号。
3)由传感信号经反馈控制器计算得到控制点处的位移Y,如果Y<Y0(Y0表示控制目标),转8),否则转4)。
4)通过反馈控制器计算控制电压Vi

式中:V0——传感器反馈的电压;
G——反馈矩阵。
5)把得到的控制电压施加到作动器上。
6)计算第i+1个时间步长后的瞬态响应。
7)i=i+1,重复步骤2)~6)。
8)结束控制。
ANSYS中的APDL参数化语言为实现有限元环境中的反馈控制仿真提供了一个便捷的途径,通APDL语言中的循环结构就能实现上述过程。有限元环境中的反馈控制系统见框图1。

图1 反馈控制系统框图
1.5 振动控制的实现
传感器把结构的位移传给反馈控制器,反馈控制器根据传来的位移信息计算出控制电压,然后施加给作动器,这样作动器就产生一个反馈位移,使结构的振动减弱。重复这一过程,结构的振动就能得到有效的控制。
2 算例
以下算例均在ANSYS软件中建立有限元模型进行仿真计算。振动控制通过ANSYS中的APDL结构参数化语言,建立的循环反馈控制系统实现。控制方法有两种,算例2.1采用的是比例反馈控制,算例2.2采用的是恒值反馈控制。
2.1 三明治悬臂板
图2所示是一个1 500 mm×500 mm×28 mm的三明治悬臂板。三明治板上、下表面分别贴有压电作动器,图中的中间白色部分为压电材料PZT,尺寸为1 500 mm×100 mm×1 mm,三明治板上下两层为复合材料,中间为夹心材料。复合材料面板的铺层为(0°/45°/—45°/90°)s,铺层示意图见图3,阴影的面为贴在复合材料表面的压电铺层。
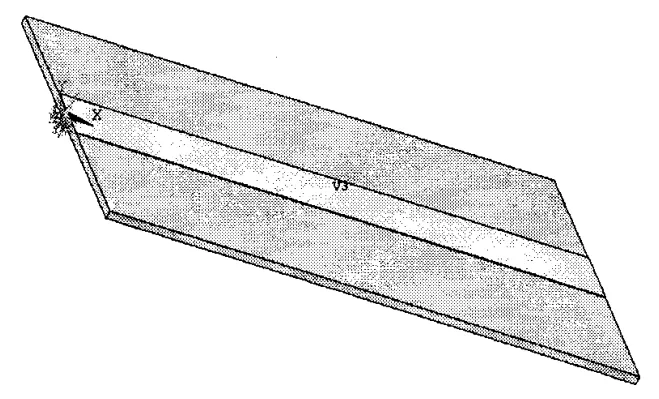
图2 三明治悬臂板几何模型

图3 复合材料面板铺层示意图
复合材料的工程常数为
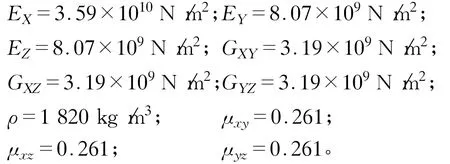
夹心材料的材料性质为

压电材料的材料性质为
压电常数为

相对介电常数为1 800。
作动器由固端到自由端平均分成五个部分,相当于五个作动器,这五个作动器同时又是传感器。反馈电压乘上反馈矩阵就得到控制电压。固端反馈的电压最大,自由端反馈的电压最小,因此控制电压固端的电压最大,自由端的电压最小,这样可以达到较好的控制效果。
板自由端某节点无阻尼自由振动见图4 a),可以看出由于没有考虑结构阻尼,振幅保持不变,维持在约12 mm,图4 b)是经过比例反馈控制后的位移响应图,经过比较可以看出经过作动器的循环反馈控制,振幅在2 s内已得到了有效的控制。
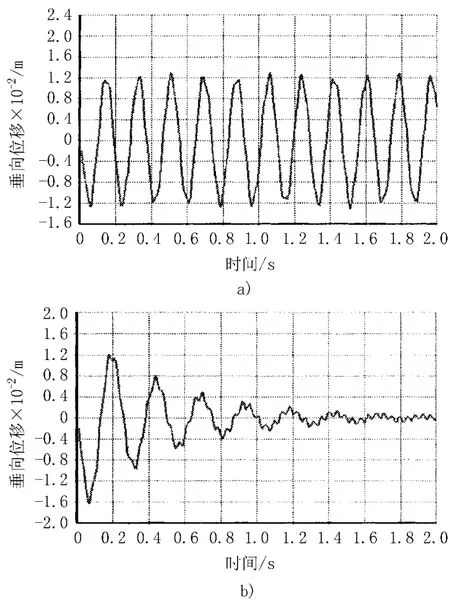
图4 控制前后悬臂板自由端位移响应对比图
2.2 两端固支的钢板
图5为1 000 mm×500 mm×15 mm的钢板,板的两端是固支。
材料性质为

压电材料为PZT,材料性质跟算例1中的一样,压电作动器有4个,尺寸为500 mm×200 mm ×1 mm,都贴在钢板上下表面的靠近固端处,见图5中黑色部分。恒值反馈控制加的电压为500 V。
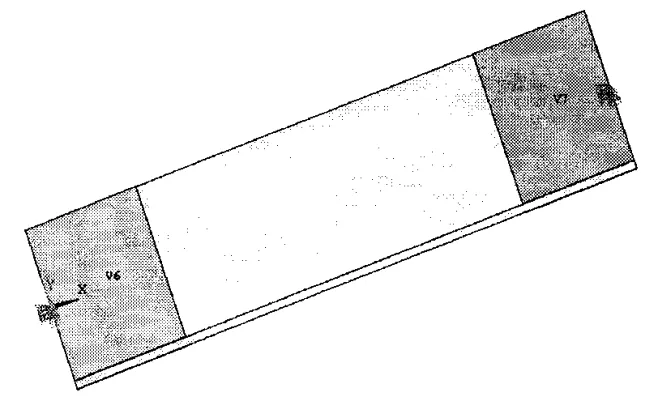
图5 两端固支的钢板几何模型
经过恒值反馈控制后的振幅随时间变化情况见图6,可以看出船舶上比较厚的钢板也可以得到很有效的控制。

图6 控制后钢板中心点处的位移相应图
3 结论
采用智能结构技术,把压电材料粘贴在船舶板梁结构表面,通过在有限元软件ANSYS中用APDL语言构造循环反馈控制系统给作动器施加电压,并采用恒值反馈和比例反馈两种控制方法,使结构振动得到有效控制,研究表明:
1)把压电材料贴在船舶上的复合材料板以及钢板上,也可以使比较大的结构在振动中得到比较有效的控制。
2)其他条件不变的情况下,在压电材料击穿电压范围内,适当增加电压可以产生更好的控制效果
3)合理布置作动器的位置,可以用相对小的代价使结构得到有效的控制。
4)在工程应用中,比较容易控制的结构可以用比例反馈控制,这样节省资源,而且控制效果比较好,如果有些结构比较难控制,比如,厚的钢板则可以采用恒值反馈控制,电压加大一点,这样控制效果会相对比例反馈更加有效。
从而验证了智能结构在结构尺寸和厚度比较大的船舶板梁结构振动控制的可行性,可以给船舶结构振动控制提供一种新的途径。
[1]夏人伟.大型航天器结构与力学问题综述[J].宇航学报,2001,22(4):1-6.
[2]Kazuro Kageyama,Isao Kimpara,Toshio Suzuki,etc.Smart marinestructurs:an approach to the monitoring of ship structures with fiber-optic sensors[J].Smart Mater Struct,1998(7):472-478.
[3]唐友刚,马网扣,杨 钢等.海洋结构智能监测与振动控制技术的最新进展[J].海洋工程,2003,21(2):103-106.
[4]余 音,金咸定,夏人伟.一种压电复合材料层合板机电耦合有限单元[J].上海交通大学学报,1998,32(11):131-134.
[5]余 音,夏人伟.含压电作动器和传感器的复合材料层板静变形有限元分析和形状控制研究[J].复合材料学报,1997,14(2):114-119.
[6]Dawood T A.Predicting damage in polymer sandwich beams using wavelet transforms based on strain signals from FBGsensors[D].School of Engineering Sciences.Ship Science.University of Southampton,2005.
[7]姚熊亮,顾玉钢,杨志国.压电类智能结构在船体振动控制方面的应用研究[J].哈尔滨工程大学学报,2004,25(6):695-699.
[8]Xu S X,Koko T S.Finite element analysis and design of actively controlled piezoelectric smart structures[J].Finite elements in analysis and sedign,2004(40):241-262.
[9]Narayanan S,Balamurugan V.Finite element modeling of piezolaminated smart structures for active vibration control with distributed sensors and actuators[J].Journal of Sound and Vibration,2003,262:529-562.
[10]Thornburgh R P,Chattopadhyay A.Transient vibration of smart structures using a coupled piezoelectricmechanical theory[J].Journal of Sound and Vibration,2004,274:53-72.
Feedback vibration control by smart marine structure
CHEN Jian-Feng YU Yin
School of Naval Architecture,Ocean and Civil Engineering Shanghai Jiaotong University Shanghai 200030
Technology of smart structure was researched to control the structure vibration according to the character of ship structure.The constitutive equations of PZT material were given.And the finite element dynamical equations of smart structure,including smart actuator and sensor,were deduced.A feedback controlling system of smart structure wasimitated numerically in ANSYS.Two typical examples of vibration control by smart structure highlights the feasibility of using smart structure to control the vibration of big size structure on the ship,which shows a new approach to the vibration control of ship structure.
smart structure actuator vibration control ANSYSsandwich composite
661.44
A
1671-7953(2007)02-0028-04
2006-07-12
修回日期2006-10-22
陈建峰(1982—),男,硕士生。
*国家自然科学基金资助项目(编号:50479014)
