船舶拖带情形下的操纵性试验研究
2007-01-28,
,
(海军工程大学 船舶与动力学院,武汉 430033)
因海洋运输、科考及勘测业的需要,船舶拖带作业越来越频繁,研究拖带对船舶操纵性能的影响,探索和开发操纵性优良的拖带船型具有重要的应用价值。迄今为止国内还没有关于拖带对船舶操纵性能影响方面的试验研究见诸报告,也没有能够比较准确地用于预报拖带情形下船舶操纵性能的理论方法。而模型试验相对简单、科学、可靠并且能够检验理论分析的正确性。为此,制作自航船模,在检验其操纵性能的基础上分别对比进行了未拖带与在不同拖缆长度下拖带的相关操纵性试验,研究单船双侧拖带操作对船舶操纵性能的影响。
1 拖带运动现象
自航模拖带两拖带物进行直航运动时,两拖缆分开一定的角度,并随着船模航速的增加,拖缆所拖带的拖带物逐渐“外漂”,拖缆间张开的角度增大。在进行回转运动时,发现内侧拖缆滞后而外侧拖缆向内回旋,两拖带物间距离减小,两拖缆逐渐靠近;同时自航模的漂角与未拖带时相比变小,船模转首同未拖带时相比变得相对困难;自航模航速降低,在船首转过角度接近90°时,内侧拖缆失效。
在拖带操作时,船体除了受到流体作用于自身的力和力矩外,还受到拖缆施加于船体的力和力矩。直航时由于采用单船双侧拖带系统,拖缆对船舶的作用仅相当于增加船模航行的阻力;回转运动时,由于两侧拖缆作用力的不对称,船体受到拖缆施加力矩的作用,回转性能发生改变。
2 基本运动方程
2.1 基本假设
船舶航行在无限深广水域,自由液面为静水面。视船体为刚体,忽略船的纵摇及升沉[1]。
2.2 坐标系
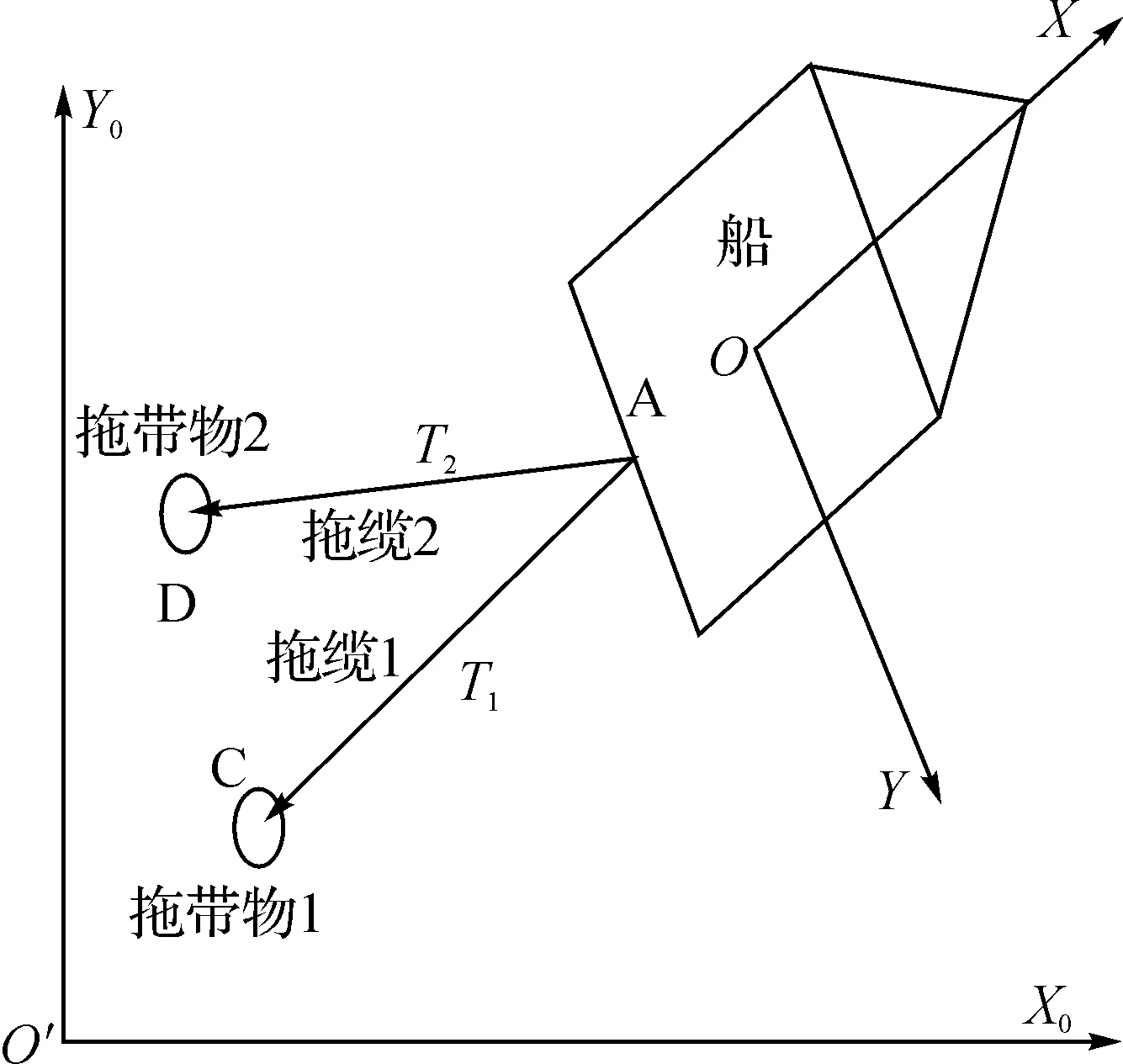
图2 坐标
2.3 基本公式
在以上基础上建立船舶拖带操纵运动基本公式[1]。
假定α1、α2及ψ分别为拖缆1和拖缆2在定坐标系中与X0轴夹角及船舶航向角。

因此船在拖带时,其操纵性能受到拖缆拉力及力矩的影响,且这种影响与拖缆拉力大小及其与船航向所夹角度有关。
如图2所示,若在拖缆拉力一定时进行回转试验,则因(α1-ψ)↑,YT1↑,XT1↓而(α2-ψ)↓,YT2↓,XT2↑,因而产生一个与回转方向相反的力矩,阻碍船舶的回转。
3 试验对象和设备
3.1 自航模要素
自航模为双舵、双桨、带轴支架木质船模,表面光滑,无舭龙骨和减摇鳍。
船模长3.72 m,水线宽0.567 m,重136.5 kg,吃水138.9 mm,纵摇周期2.56 s,横摇周期16.20 s。
3.2 螺旋桨桨模要素
试验采用机翼型螺旋桨,该桨的主要特征及参数如下:
直径 105 mm; 侧斜 39.11°
叶数 5; 纵斜 非线性
螺距比 1.4; 螺距分布 非线性
盘面比 0.75; 旋向 内旋
毂径比 0.33; 材料 巴氏合金
3.3 舵模型要素
舵模剖面形式为NACA0015,安装位置为舵轴向船中内偏11 mm。
3.4 拖带要素
拖带物为漂浮于水面的特制小浮体,拖缆拉力为28 N。
3.5 试验设备
船模遥控设备FP-T8SGA-P;数据遥测设备YCF-3C;数据采集设备DH-5932;数据测量设备为航向陀螺C-12、YT-3;操舵设备为MD3-2舵机。
4 试验内容
1) 回转操纵性试验。在未拖带时进行高速(v=2.18 m/s)和低速(v=1.46 m/s)的回转试验及在拖缆长分别为10、20、30 m时进行低速(v=1.46 m/s)回转试验,舵角分别为±10°、±15°、±20°、±25°、±30°、±35°(受条件限制±5°的回转无法进行)。
2) Z形操纵试验。在未拖带情形下进行高速(v=2.18 m/s)和低速(v=1.46 m/s)的Z形操纵试验及在拖缆长度分别为20、30 m时进行低速(v=1.46 m/s)的Z形操纵性试验,舵角分别为±10°、±20°,试验过程记录相关数据。
3) 航向稳定性试验。在未拖带情形下进行低速(v=1.46 m/s),舵角为±15°的航向稳定性试验,试验过程记录数据并绘制出首向角随时间变化的关系曲线图。
4) 保持航迹能力操纵性试验。在未拖带情形下进行舵角为±15°的回直操纵性试验和在拖缆长为20 m时进行两次零度舵角的直航试验,航速均为v=1.46 m/s[3]。
5 试验结果分析
5.1 回转性能试验结果对比分析
相对回转直径对比试验曲线见图3。

图3 相对回转直径对比曲
由图3知,未拖带时,当船以35°舵角高速进行回转时相对回转直径约为3.0,以低速回转时约为2.8,由Davidson 所提出的船舶在最小相对回转直径约为3.0时回转性,能优良的结论可知[4],该船具有良好的操纵回转性能。拖带时船的相对回转直径与未拖带时相比有明显变化,当船以小舵角低速进行回转时,相对回转直径几乎增大一倍,而在大舵角时也增大了约50%,显然拖带使得船舶回转性能恶化。
同时,由图3可知回转速度及拖缆长度对回转性能的影响不大,原因有:
1) 自航模操舵回转时,由于拖缆拉力的作用,产生了一个与回转方向相反的回转力矩,该力矩阻碍了船舶的回转,使得船舶航行时的漂角减小,回转半径增大。
2) 改变拖缆长度,在自航模回转运动中并未改变拖缆拉力的大小及拉力的方向,而且拖缆拉力一定,所以拖缆长度对回转性能的影响不大。
相对纵距和相对横距的对比曲线见图4、5。

图4 相对纵距对比曲线

图5 相对横距对比曲
由图4、5可知,拖带使得相对回转纵距和相对横距发生较大的改变,变化趋势与相对回转直径的相同,即在小舵角时增加约1倍,而在大舵角时也增加了约50%。拖带长度对相对纵距和相对横距的影响不大,在大舵角时基本相当,并相互交错。
5.2 转首特性结果分析
为了更好表示船舶对舵作用的应答性,将其从执行操舵点起至回转圈中心的距离,称为进程R′,R′=v(T+t1/2)=S3-R0。式中:S3、R0分别为回转纵距和定常回转半径。R′越小则应答性越好。若用操舵来改变船的航向,则R′可代表在原航向上,由转舵瞬时的重心位置直至新、旧航向交点之距离。当R′/L<1时,船具有很好的应答性[4]。
由图6知,不论是拖带还是未拖带,该船均有良好的应答性。
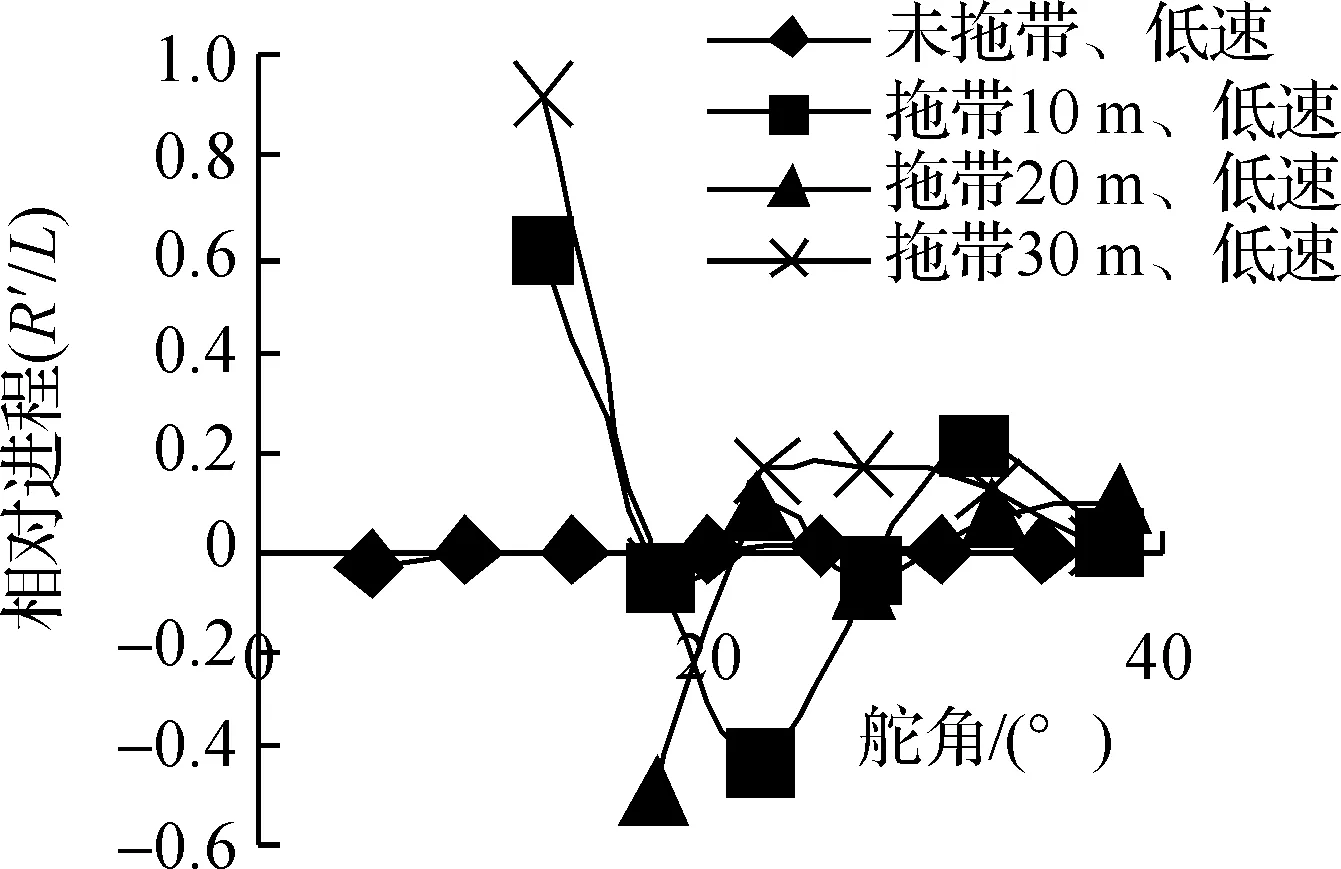
图6 相对进程对比曲
5.3 Z形操纵试验结果分析
以低速进行Z形试验所得结果见表1。
经验表明,一般压载船和油船K′为0.7~1.3、T′为0.4~1.1时,具有较好的操纵性[4],显然未拖带时K′、T′均在上述范围内,可知该船操纵性良好;而在拖带时K′、T′均减小,其中K′减小了20%~50%,而T′改变不太明显。
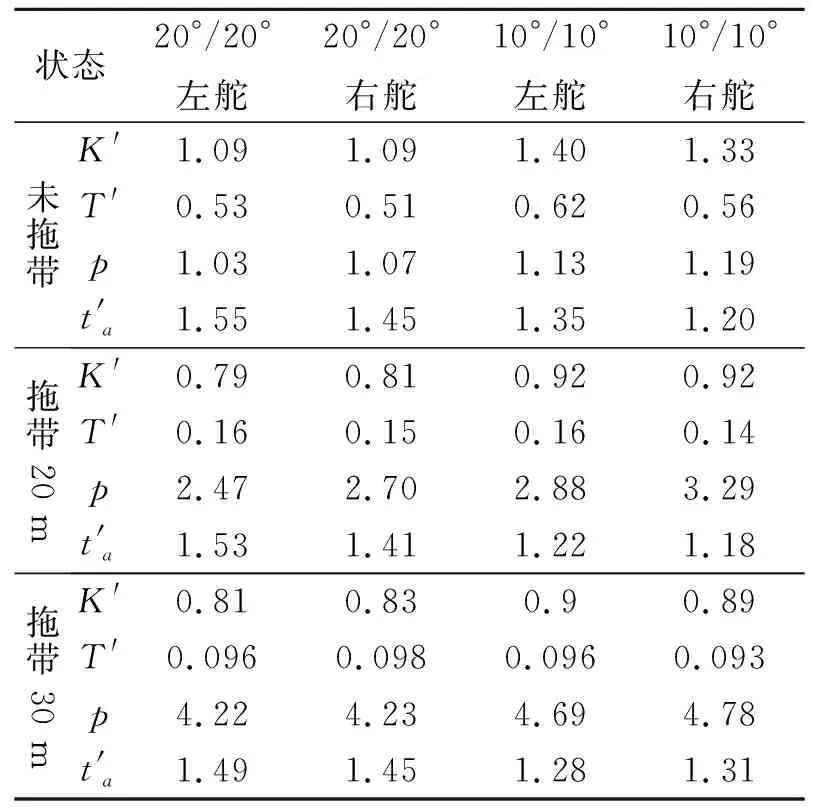
表1 Z形操纵试验性能指数
5.4 转首性能结果分析
5.5 保持航迹能力试验结果分析
由图7、图8知,自航模以低速v=1.46 m/s进行±15°舵角的回直试验,最终都能达到直航,显然其具有零舵角稳定直航能力。

图7 自航模低速右15°回直曲线
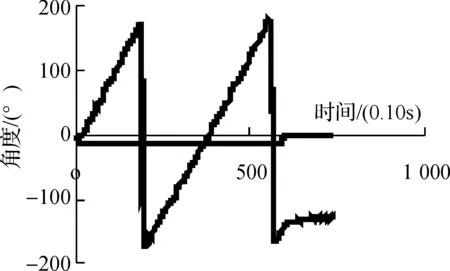
图8 自航模低速左15°回直曲
由图9可知,自航模以v=1.46 m/s、零度舵角及拖带20 m航行历时约40 s、行程60 m(约16倍船长),仅偏航8°。考虑到自航模拖带回转时,两拖带物不可能做到完全相同,而且拖带开始时两拖缆与船模航向所成角度不一样,由此造成小角度偏斜,仍可认为其保持航迹能力很好[6]。
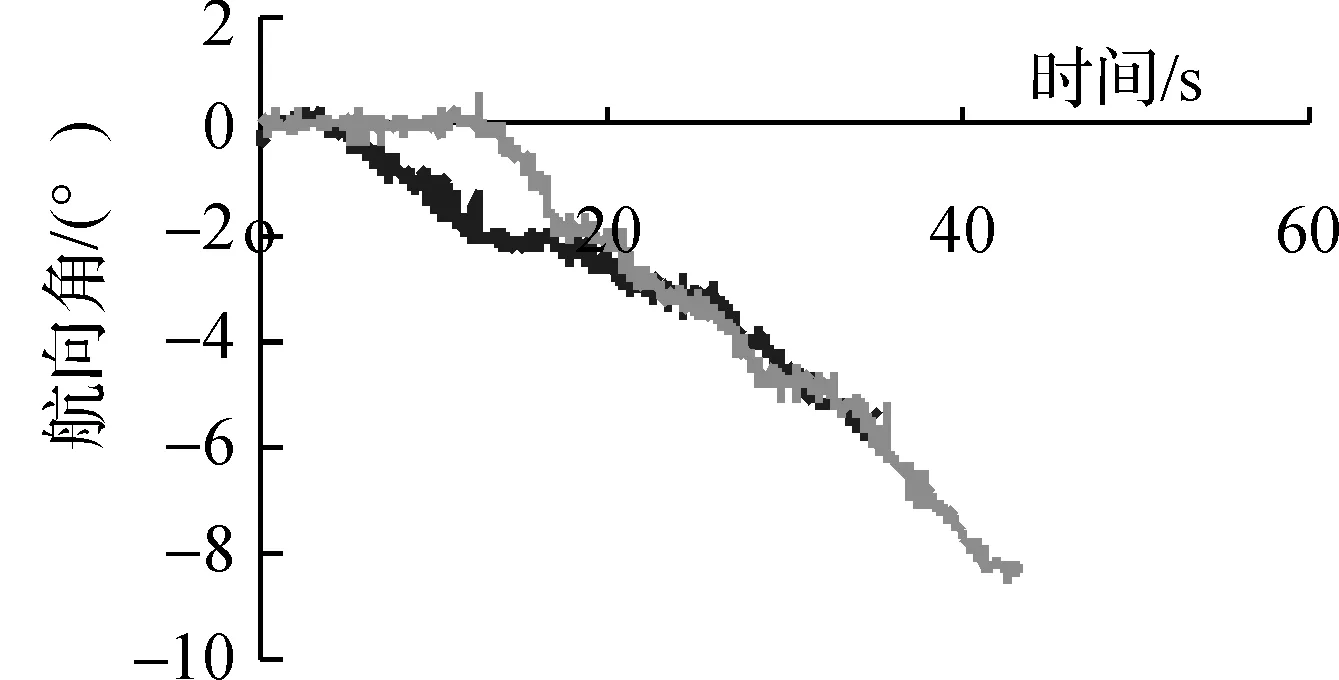
图9 20 m拖带低速直航航向角变化曲
6 结论
1) 该船自航模具有良好的回转性能,满足相对回转半径小于3.5的要求且直线稳定性能、转首性能、应舵性能均良好。
2) 拖带使船回转性能恶化,在小舵角使相对回转半径、相对横距和相对纵距值增加了近1倍,而在大舵角时也近50%。
3) 在拖带情形下,该船自航模仍具有直线运动稳定性。
4) 除必须紧急回转外,不允许作大舵角(大于15°)、长时间回转机动。
[1] 乐美龙.船舶操纵性预报与港航操纵运动仿真[M].上海:上海交通大学出版社,2004.
[2] 李殿璞.船舶运动与建模[M].哈尔滨:哈尔滨工程大学出版社,1999.
[3] 郝亚平.船舶性能试验技术[M].北京:国防工业出版社,1988.
[4] 吴秀恒.船舶操纵性与耐波性[M].北京:人民交通出版社,1999.
[5] 盛振邦.刘应中.船舶原理[M].上海:上海交通大学出版社,2004.
[6] 范尚雍.船舶操纵性[D].武汉:海军工程大学,2004: 120-124.