基于图标成像的室内高精度定位系统
2025-03-02卢洪斌唐文龙何应勇唐秀干



摘要:高精度的室内定位系统可以极大地拓展定位应用的范围,文章对基于图标成像的室内定位方法进行了系统研究,利用分布在室内空间的图标与其所成像的位置关系,对待定位点进行高精度的室内定位。该系统由图标、成像处理模块、定位计算3部分组成,成像处理模块完成图标成像和光电信号转换的功能,定位计算完成图标成像点位置确定、图标识别、定位图标优选和待定位点位置坐标计算等功能。仿真实验结果表明,系统的定位精度可以达到厘米量级。
关键词:图标;成像;室内定位;定位算法
中图分类号:TN929.1" 文献标志码:A
0 引言
目前,绝大多数定位系统的应用主要是对人或车辆的定位,定位精度通常需要在几百厘米到几十米的范围,在室外环境,诸如GPS、北斗卫星等定位系统已经能够为用户提供这种精度的稳定的定位服务,基本满足了用户在室外场景中的应用需求。而大量的定位需求发生在室内场景,室内由于受到建筑物的遮挡,卫星信号衰减大,无法进行稳定可靠的室内定位[1]。除此之外,室内定位应用不仅用于对人和车辆的定位,更多的应用需求是对较小尺寸物体的定位,如机器人对小尺寸物体的操控会涉及更小物体的定位,这些定位应用精度通常在厘米量级,当前的卫星定位系统是无法达到此精度的。为解决室内小尺寸物体的定位应用,出现了很多不同技术方案的室内高精度定位方法,但这些室内定位方法还存在不少须要克服的困难,还须要解决以下问题:室内环境布局复杂多变,障碍物和干扰源多,对定位精度和定位稳定性造成影响;厘米及更高精度的定位还没有可靠的技术方案;部分高精度定位方式须要提前布设基站,实施困难;高精度室内定位需要比较昂贵的辅助设备或前期大量的人工处理, 定位精度与成本难以兼顾。这些问题大大制约了技术的推广普及[2-4]。
随着技术的不断发展,高精度、低成本、普适性成为室内定位技术的未来研究方向,快速发展的计算机视觉、物联网、移动通信网络等技术将为室内定位技术提供更多的技术途径。目前采用的室内定位方法主要有基于信号强度的室内定位方法、基于指纹标记的室内定位方法、基于频分多址的室内定位方法、可见光多接收点几何中心定位方法、基于光源成像的室内定位法,除此之外,还有不同室内可见光定位方法结合在一起的定位方法。这些室内定位方法还在发展过程中,还没有一种方法能可靠地实现厘米量级的高精度定位[5-7]。
当前普遍采用的室内定位技术必须在定位基站与定位接收端之间建立单向或双向通信连接关系,这样的定位系统结构相对复杂且容易受到电磁干扰和室内空间可移动物体位置变化所带来的信号随机衰落的影响。文献中常见的基于光源成像的室内高精度定位可以实现较高精度的定位,但这种定位方式须要图像传感器检测信号接收端在三维空间中的方位角、俯仰角和光源到成像点的距离。由于测量精度制约,系统的定位精度通常也达不到厘米量级,定位过程也不太稳定,特别是光源成像普遍存在的光晕现象,导致成像模糊,使得定位精度无法进一步提高[8-10]。
借助当前人工智能中的图像识别技术的广泛成熟应用,本文提出一种基于图标成像的定位方法,由单个图像传感器对分布于室内天花板平面上的图标成像,通过对图标所成图像的识别和成像位置的标定,由图标和成像点的几何位置关系确定待定位物体的精确位置。此方法不须要在基站与定位接收端之间建立通信连接关系,也不须要测量光线角度和测距,同时能避免光源成像模糊和电磁信号干扰的问题,在简化定位系统结构的同时,可大幅度地提高室内定位的精度。
1 图标成像室内定位仿真模型
本文的仿真模型选择长宽高为5 m×5 m×4 m的室内空间进行仿真实验,将若干个不同形状的图标按一定分布规律布置在室内天花板上,每个图标的形状具有唯一性且每个图标有预先精确标定的坐标值。基于图标成像的室内定位系统由图标和成像定位处理模块组成。图标选择一些形状比较规则的几何图形,成像定位处理模块包含透镜组、滤波膜、图像传感器、成像信号处理和定位计算模块。透镜组用于对图标的成像,图像传感器把图标光学图像转换为成像平面的数字图像,成像信号处理和定位计算模块完成图标的识别、定位图标优选、待定位点坐标计算等功能。
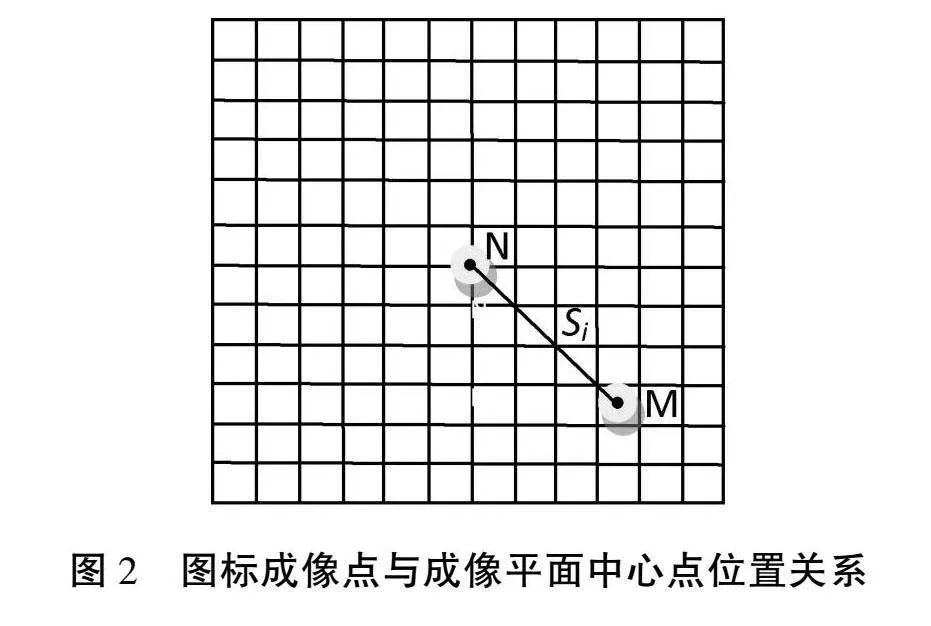
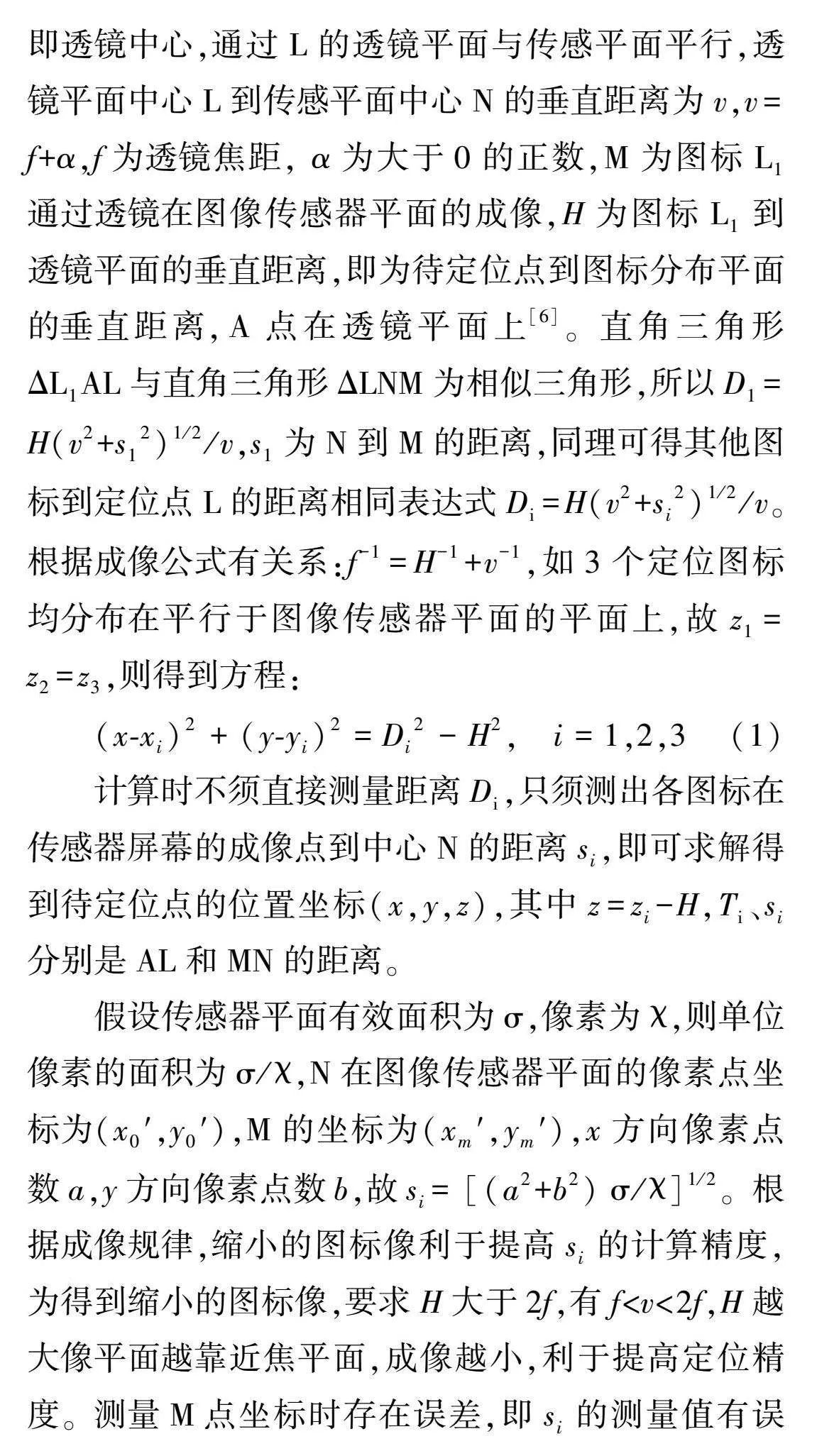
基于图标成像的室内定位系统的定位原理如图1所示。系统通过以下步骤实现室内定位:成像定位处理系统对图标坐标赋值;通过透镜组、图像传感器对布置于室内顶部平面上的图标成像;成像信号处理和定位计算模块对成像的图标进行识别并优选出3个成像效果最佳的图标;利用任意3个非共线的图标及其在成像系统传感器平面成像点的连线所构成的几何位置关系,根据所选图像传感器的感光面积及像素密度大小等参数,成像信号处理及定位计算模块计算确定待定位点L的坐标值。图标成像点与成像平面中心点位置关系如图2所示。si为图标在图像传感器成像平面的成像中心点M到成像平面中心N的距离,结合图1可以测量si的值。
根据图1中图标与成像点的几何位置关系,可计算出待定位点L的坐标,3个非共线的图标坐标分别为L1(x1,y1,z1)、L2(x2,y2,z2)、L3(x3,y3,z3),它们到待定位点L的距离分别为D1、D2、D3,L为待定位点即透镜中心,通过L的透镜平面与传感平面平行,透镜平面中心L到传感平面中心N的垂直距离为v,v=f+α,f为透镜焦距, α为大于0的正数,M为图标L1通过透镜在图像传感器平面的成像,H为图标L1到透镜平面的垂直距离,即为待定位点到图标分布平面的垂直距离,A点在透镜平面上[6]。直角三角形ΔL1AL与直角三角形ΔLNM为相似三角形,所以D1=H(v2+s12)1/2/v,s1为N到M的距离,同理可得其他图标到定位点L的距离相同表达式Di=H(v2+si2)1/2/v。根据成像公式有关系:f-1=H-1+v-1,如3个定位图标均分布在平行于图像传感器平面的平面上,故z1=z2=z3,则得到方程:
(xxi)2+(yyi)2=Di2-H2 , i=1,2,3(1)
计算时不须直接测量距离Di,只须测出各图标在传感器屏幕的成像点到中心N的距离si,即可求解得到待定位点的位置坐标(x,y,z),其中z=zi-H,Ti、si分别是AL和MN的距离。
假设传感器平面有效面积为σ,像素为χ,则单位像素的面积为σ/χ,N在图像传感器平面的像素点坐标为(x0′,y0′),M的坐标为(xm′,ym′),x方向像素点数a,y方向像素点数b,故si= [(a2+b2) σ/χ]1/2。根据成像规律,缩小的图标像利于提高si的计算精度,为得到缩小的图标像,要求H大于2f,有flt;vlt;2f,H越大像平面越靠近焦平面,成像越小,利于提高定位精度。测量M点坐标时存在误差,即si的测量值有误差,设测量误差为ΔS,si的测量值可表示为:
si=TifH-f±Δs(2)
ΔS值见式(3),其近似等于像的半径,图标长为l、宽为w,β为成像的缩小倍数。
Δs=βl2+w22(3)
由上两式可知,提高图像传感器的像素、减小成像的半径,可提高测量si长度的精度,从而提高定位的精度。
2 仿真实验结果与分析
仿真实验采用的图标尺寸分别为2×2 cm2、4×4 cm2、9×9 cm2和10×20 cm2,焦距的取值分别为8 mm、10 mm、12 mm和15 mm,采用有效感应面积为37 mm 2、像素为1024×768的图像传感器。
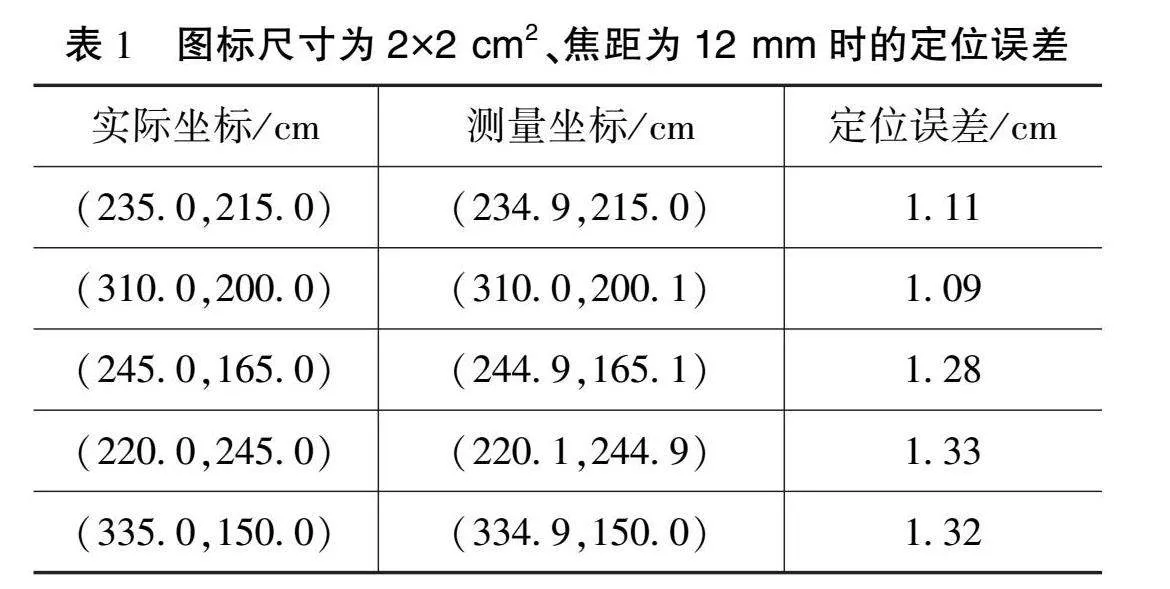
模型仿真实验计算结果如表1和表2所示。图标尺寸为2×2cm2、焦距为12mm时,计算结果如表1所示。
图标尺寸为9×9cm2、焦距为12mm时,计算结果如表2所示。
表1、表2中,实际坐标为待定位点的实际坐标值,测量坐标为系统仿真计算所得待定位点的坐标值。表1、表2的实验结果说明,相同条件下,图标尺寸大小对系统的定位误差大小有明显的影响。图标" 尺寸为2×2 cm2时,平均定位误差为1.28 cm,图标尺寸为9×9 cm2时,平均定位误差为5.54 cm。因而在实际应用中须根据定位精度要求选择所布设的图标大小。但图标尺寸大小也不能任意小,还必须考虑图标与定位装置的距离,两者距离越远,成像装置对小尺寸图标的成像清晰度会变差,将导致所成图像无法被系统识别,这样就无法进行下一步的定位计算。不同室内空间大小,特别室内空间垂直高度的大小,定位系统可以选择布设的最小图标尺寸是有限制的,因而定位精度也会受到限制。
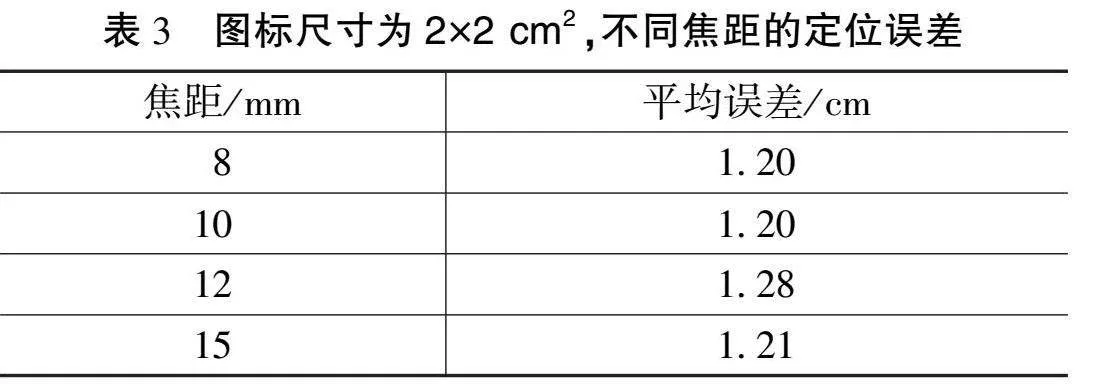
表3、表4为给定图标尺寸下,成像系统透镜在不同焦距下的定位误差。
仿真实验结果表明,不同焦距对定位误差基本没有影响,这为定位用透镜组提供了广阔的选择空间,说明图标尺寸是造成定位误差大小的主要因素。不同图标尺寸和不同焦距下多次仿真测量所得到的定位平均误差如表5所示。
仿真实验表明,系统的定位精度与图标的尺寸有直接的关系,更小的图标尺寸可以实现更高的定位精度,但图标的尺寸不能无限地减小,图标尺寸减小到成像系统无法分辨的尺度时,就无法进行图标识别,从而无法进行下一步的定位计算。仿真实验还发现3个经识别后选择的非共线图标相互之间的间隔越远,定位结果越准确。这是因为这3个图标之间的距离越远,它们所成像的间隔也越大,si的测量值也就越准确,最后计算出的误差也就越小。
上述仿真实验结果给出了图标定位系统设计时室内图标大小选择的依据,图标尺寸大于10×20 cm2时,定位误差将达到厘米量级以上。图标尺寸小于4×4 cm2时,可以实现厘米量级的定位精度,这些尺寸的图标在室内空间装饰中是常见的装饰图案尺寸,因而其布置不影响室内装饰的美观性,对图标的布置具有现实可行性。上述所选图标尺寸是大部分成像系统易于分辨和检测的,故基于图标成像的定位系统是一种易于实施的高精度定位技术。
3 结语
当前人工智能中的计算机图像识别技术已经得到广泛的应用,这为基于图标成像的定位系统提供了成熟的技术基础[3] 。本文提出的基于图标成像的室内高精度定位系统可以实现厘米量级的高精度室内定位,其优点是不须要在基站与定位接收端之间建立通信连接关系,也不需要复杂的光学测量,极大地简化了定位系统的结构,是一种低成本的高精度定位方法。
本文所提出的基于图标成像的室内高精度定位系统具有以下特点:不同成像焦距与定位精度无关;图标的尺寸越大,定位误差越大;图标尺寸越小,定位误差越小。
本文提出的定位系统可以实现不同精度要求的室内定位,定位精度可以从厘米量级到分米量级,可以灵活应用于不同室内空间和定位精度要求的实际场景。
基于图标成像的室内高精度定位系统不仅可以用于室内高精度定位,还可用于更小空间内的超高精度定位,如精密加工和机器人操控装置中,在几立方米或更小空间内通过布设更小的图标,理论上可以实现亚毫米量级的定位,这方面的技术及应用有待今后进一步的探究。
总之,基于图标成像的室内高精度定位系统是一种新的技术选择,可以为当前多种不同的室内高精度定位技术提供有益的参考。
参考文献
[1]SUN S Z,LI G Y,GAO Y J,et al.Robust dynamic indoor visible light positioning method based on CMOS image sensor[J].Photogrammetric Engineering and Remote Sensing,2022,88:333-342.
[2]YANG J Q,QIN D Y,TANG H P,et al.Indoor positioning on smartphones using builtin sensors and visual images[J].Micromachines,2023(2):242-248.
[3]KHAN S,PARADELLS J,CATALAN M.Intelligent geomagnetic indoor positioning system[J].Photonics,2024(7):626-631.
[4]ALEIX B,CARLOS L,MARISA C.A highaccuracy,scalable and affordable indoor positioning system using visible light positioning for automated guided vehicles[J].Electronics,2024,13:82-89.
[5]陈静,刘旋,郑杰.可见光室内定位技术研究进展[J].电讯技术,2024(3):478-487.
[6]卢洪斌.一种基于图标成像的室内定位系统及方法:CN108362286A[P].2019-10-03.
[7]张渤.可见光室内定位若干关键技术的研究[D].北京:北京邮电大学,2023.
[8]NARASIMAN S C,ALPHONES A.Indoor visible light positioning for a single partially visible LED[J].IEEE Sensors Letters,2024(5):1-4.
[9]JANG B,KIM H,KIM J W.Survey of landmarkbased indoor positioning technologies[J].Information Fusion,2022(2):166-188.
[10]WANG Y,H B,YUE C P.Arbitrarily tilted receiver camera correction and partially blocked LED image compensation for indoor visible light positioning[J].Information Fusion,2022(6):4800-4807.
[11]刘颂,刁艳美.基于多源信息融合的列车定位方法研究[J].无线互联科技,2024(7):8-12.
(编辑 王雪芬)
Indoor highprecision positioning system based on icon imaging
LU" Hongbin, TANG" Wenlong, HE" Yingyong, TANG" Xiugan
(Baise University, Baise 533000, China)
Abstract:" A highprecision indoor positioning system can greatly expand the scope of positioning applications. This article systematically studies the indoor positioning method based on icon imaging, using the relationship between icons distributed in indoor space and their imaged positions to achieve highprecision indoor positioning of the target location. The system consists of three parts: icon, imaging processing module, and positioning calculation. The imaging processing module completes the functions of icon imaging and photoelectric signal conversion. The positioning calculation completes the functions of icon imaging point position determination, icon recognition, positioning icon selection, and coordinate calculation of the position of the point to be positioned. The simulation experiment results show that the positioning accuracy of the system can reach the centimeter level.
Key words: icon; imaging; indoor positioning; positioning algorithm
