一种艇载反无人系统发控单元设计
2025-02-09李二磊张发枝




摘 要:针对无人装备,设计了艇载反无人系统发控单元,包含70 mm、40 mm便携式防空单元和反装甲单元,借助艇载探测设备,能够对5 000 m以下空域中小型无人机、无人直升机、自杀式无人艇等进行有效威慑与打击。共配备了11个发射控制接口,能够对常规无人装备进行多批次打击,护航基地、港口和海上高价值目标。发控单元采用ARM+FPGA主从控制结构,充分发挥了两种不同芯片的优点,并在硬件电路中对发射流程的硬件执行顺序进行了创新性设计,在严格按照发射流程顺序执行的同时,能够确保不因元器件损坏而造成误击发,进一步确保了系统的安全性和可靠性。
关键词:艇载;ARM+FPGA;反无人系统;电路执行顺序;安全性与可靠性
中图分类号:U674.77 文献标志码:A DOI:10.3969/j.issn.1673-3819.2025.01.005
Design of a launch and control unit for anti-unmanned system on a boat
LI Erlei, ZHANG Fazhi
(Jiangsu Automation Research Institute, Lianyungang 222061,China)
Abstract:The boat based on anti-unmanned system launch and control designed in this article integrates 70 mm unit, 40 mm unit and anti-armor unit. With the help of detection equipment, it can effectively deter and strike small and medium-sized UAVs, unmanned helicopters, suicide USVs, etc. in the airspace below 5 000 meters. The control unit adopts ARM+FPGA master-slave control structure, which fully plays the advantages of two different chips, and innovatively designs the hardware execution sequence of the launch process in the hardware circuit. While executing in strict accordance with the launch process sequence, it can ensure that no misfiring is caused by damage to any component, further ensuring the safety and reliability of the system.
Key words:boat-borne; ARM+FPGA; anti-unmanned system; circuit execution sequence; safety and reliability
近年来发生的多场地区冲突与局部战争中,无人装备的实战化程度不断提升,其在智能化战场中逐渐展现出不容小觑的作战实力[1]。俄乌冲突中,俄罗斯塞瓦斯托波尔港、黑海舰队、克里米亚大桥陆续遭到乌克兰海军无人艇袭击,俄罗斯也使用无人艇攻击了敖德萨的扎多卡铁路桥[2]。目前,世界各国都在寻求发展反无人系统作战技术,以形成对无人作战属性相克、跨域制衡的非对称作战能力[3]。
反无人系统作战技术中,为了让敌方无人情报侦察机彻底瘫痪,最有效、直接的措施是使用打击毁伤类反制技术,彻底摧毁敌无人情报侦察机存储的情报信息[4]。目前,国内外反无人系统打击毁伤类技术多见于陆基或车载系统,对沿海军事基地、港口的向海纵深防御能力不足[5-7]。针对海上特殊环境,有人/无人艇平台具有机动性强、速度快、搭载载荷能力突出的特点,且在向海纵深防御方面具有先天优势,非常适合作为重要军事基地、港口以及演习区域的反无人系统搭载平台[8]。本文针对敌方无人机、自杀式无人艇的特点,设计了一种集某型40 mm、70 mm便携式防空导弹以及某型反装甲导弹发射与控制于一体的艇载反无人系统发控单元,能够同时反制小型、中型无人机、无人直升机和自杀式无人艇,该发控单元采用ARM+FPGA主从控制结构,并在硬件电路中对发射流程的硬件执行顺序进行了创新性设计,能够确保不因元器件损坏而造成导弹误击发,保证了系统的安全性。本文设计的艇载反无人系统组成如图1所示。
1 发控单元总体结构设计
发控单元对外通过以太网接口接收上层计算机控制指令,并反馈相应状态信息,接收外部时统信号作为触发时钟,确保系统信息保持同步[8-9]。发控单元内部主要包括供电单元、ARM+FPGA主控单元、70 mm控制单元、40 mm控制单元、反装甲单元、环境温度监测单元,如图2所示。
2 发控单元内部单元模块设计
本文所设计的发控单元主要包括ARM+FPGA主控单元、70 mm控制单元、40 mm控制单元、反装甲控制单元等,除了主控单元外,还包含6单元70 mm、3单元40 mm和2单元反装甲导弹的发射控制,所针对的目标类型如表1所示。
2.1 ARM+FPGA主控单元
本文采用ARM+FPGA形式的主从控制架构,如图3所示,其中ARM为主控制芯片,FPGA为从控制芯片,充分发挥两者的优势,通过ARM自带的网络接口与上层控制计算机通信[10],通过UART0-UART2接口与40 mm单元进行信息交互,通过UART3接口与反装甲单元进行信息交互,通过CAN通信接口与70 mm单元进行通信,并利用ARM串行控制机制,分别对70 mm单元、40 mm单元和反装甲单元的发射流程的各种模拟量进行控制[11];通过FPGA并行处理机制,分别对70 mm单元中各种频率检测任务进行处理,具体包括捕获频率检测、角位移频率检测,并对起转线圈输出电路进行控制;ARM与FPGA之间通过地址线和数据线进行数据传输,发送控制指令并返回状态信息。在热电池激活、点火等关键电路控制中,采用ARM+FPGA冗余控制的方式,确保电路的安全和可靠。
2.2 70 mm控制单元
70 mm单元主要针对无人直升机类目标,负责对某型70 mm导弹进行发射控制,根据主控单元的控制指令,执行供电供气、起转线圈加电、频率检测、解锁、电池激活、电源转换、气源转换、点火等操作,在70 mm导弹发控过程中,应严格按照规定流程顺序执行,发控单元执行点火程序时,不仅仅依赖按键指令,还应当判断已解锁且发控单元在热电池激活、气源激活、电源转换已按顺序执行完毕,才允许执行点火动作。70 mm导弹发控流程如图4所示。
本文设计的70 mm导弹发射电路,除通过软件判断外,还在硬件设计上保证点火程序各个动作的执行顺序,不因软件指令错误或个别硬件失效导致导弹误点火。如图5所示,当接收到执行点火指令后,热电池控制信号UDC_IO由高变低,热电池激活信号由接地状态转变为+20 V,XQ_5V接通+20 V;DD_JD_IO同时有效时,电源转换才能完成,即完成三组电源从有到无的转换;此时K4的1脚为+20 V,当UB1_IO同时有效时,开气指令由接地转变为接+20 V,同时使得K3的1脚连接+20 V;此时当点火控制信号FIR_SGN_IO有效时,点火信号FIR_SGN和点火地信号FIR_SGN_GND同时有效,此时点火信号有效,中间任一信号不满足要求都会造成点火失败,从而确保电路的安全和可靠。
2.3 40 mm控制单元
40 mm单元主要针对低空中小型无人机类目标,负责对某型40 mm导弹进行发射控制,根据主控单元的控制指令,与导弹端进行1路RS422串口通信,一路PAL制式视频、安保信号、分离信号、开机信号、电池电压检测、插座电源等模拟信号的检测与控制。在本文设计的发控单元中,应严格按照规定流程顺序执行,对于不符合发控流程的指令或不满足发射条件的导弹发射指令,发控单元均应当对其屏蔽,拒绝发送指令或拒绝执行。其中,插座电源控制电路如图6所示。
2.4 反装甲控制单元
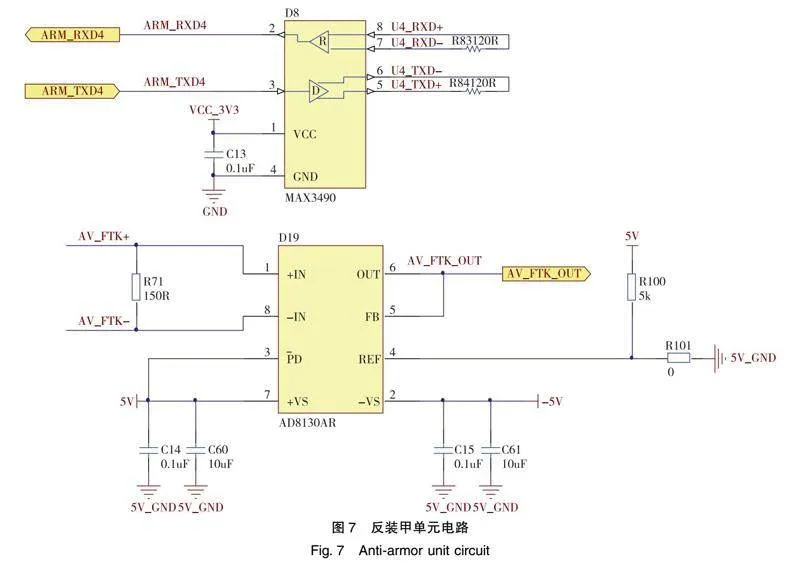
反装甲单元主要针对中小型自杀式无人艇类目标,负责对某型反装甲导弹进行发射控制,根据主控单元的控制指令,与反装甲导弹端通过1路RS422串口进行通信。反装甲导弹端拥有自带的发控单元,在本单元的设计中只需将上层控制计算机的控制指令依照相关协议通过RS422串口发送至导弹端发控单元即可,另外需要将PAL制式差分视频转换为单端视频送入导弹端,如图7所示。
3 发控单元样机及试验情况
发控单元样机如图8所示,尺寸为260*270*260(长*高*深,单位mm),其中,X1—X6为70 mm单元控制接口,X8—X10为40 mm单元控制接口,X11为两路反装甲单元控制接口,KG为开盖模块接口。
目前,该发控单元已在码头静止环境下进行了两次70 mm单元和一次反装甲单元反无人系统试验,均命中目标,下一步将开展有人/无人艇载机动环境下对
海上无人系统目标的试验验证,进一步提升海上反无人系统的能力。
4 结束语
本文设计的艇载反无人系统发控单元充分发挥了ARM和FPGA芯片的优势,在发射流程控制电路的执行顺序上进行了创新性设计,具有非常好的安全性和可靠性。此外,该发控单元还具备对无人机、无人艇等目标同时、多批次打击的能力,是重要基地、港口、货船等高价值目标护航任务的优质选择。
参考文献:
[1]
周末, 孙海文, 王亮, 等. 国外反无人机蜂群作战研究[J]. 指挥控制与仿真, 2023, 45(2): 24-30.ZHOU M, SUN H W, WANG L, et al. Research on foreign anti-UAV swarm warfare[J]. Command Control & Simulation, 2023, 45(2): 24-30.
[2] 吴大辉. 乌克兰危机与新军事革命:无人艇篇[J]. 世界知识, 2023(15): 72-73.WU D H. "Ukrainian crisis and the new military revolution: unmanned boats[J]. World Affairs, 2023(15): 72-73.
[3] 王泽坤. 反无人机指控系统的设计与仿真评估研究[D]. 西安: 西安电子科技大学, 2021.WANG Z K. Design and simulation evaluation of anti-UAV command system[D]. Xian: Xidian University, 2021.
[4] 王祥科,沈林成,李杰,等.无人机集群控制理论与方法[M].上海:上海交通大学出版社,2021. WANG X K, SHEN L C, LI J, et al. Theory and methods of drone cluster control[M]. Shanghai: Shanghai Jiao Tong University Press, 2021.
[5] 赵晨晨, 欧宗伟, 徐磊, 等. 无人机集群作战威胁及反无人机集群对策研究[C]//第十一届中国指挥控制大会论文集, 北京, 2023: 138-141. ZHAO C C, OU Z W, XU L, et al. Research on the threats of unmanned aerial vehicle cluster operations and countermeasures against unmanned aerial vehicle clusters[C]//Proceedings of the 11th China Command and Control Conference, Beijing, 2023: 138-141.
[6] 孙昭, 何广军, 李广剑. 美军反无人机技术研究[J]. 飞航导弹, 2021(11): 12-18.SUN Z, HE G J, LI G J. Research on US armys anti-UAV technology[J]. Aerodynamic Missile Journal, 2021(11): 12-18.
[7] 凌海风, 李瑞, 柏林元, 等. 俄罗斯反无人机装备发展现状及启示[J]. 国防科技, 2023, 44(3): 81-87, 141. LING H F, LI R, BAI L Y, et al. Current developments and implications of Russian anti-UAV equipment[J]. National Defense Technology, 2023, 44(3): 81-87, 141.
[8] 刘正锋, 张隆辉, 魏纳新, 等. 限制区域水面无人艇路径规划与跟踪控制研究[J]. 船舶力学, 2021, 25(9): 1 127-1 136. LIU Z F, ZHANG L H, WEI N X, et al. Study on path planning and following control of unmanned surface vehicles in restricted areas[J]. Journal of Ship Mechanics, 2021, 25(9): 1 127-1 136.
[9] 万杨, 姜楠. 飞行器综合控制软件发射控制架构设计[J]. 工业仪表与自动化装置, 2020(2): 78-80, 127. WAN Y, JIANG N. Design of launch control architecture for aircraft integrated control software[J]. Industrial Instrumentation & Automation, 2020(2): 78-80, 127.
[10]冷月香, 马远超, 吕慧, 等. 小型无人机地面式发射控制系统设计[J]. 计算机测量与控制, 2019, 27(10): 125-128. LENG Y X, MA Y C, LYU H, et al. Design of ground-based launch control system for miniaturized UAV[J]. Computer Measurement & Control, 2019, 27(10): 125-128.
[11]段杰, 张帅, 王志德, 等. 基于通用化平台的混装发射控制技术研究[J]. 仪器仪表用户, 2020, 27(6): 14-16, 50. DUAN J, ZHANG S, WANG Z D, et al. Researches on mix-load launch control technology based on universal platform[J]. Instrumentation, 2020, 27(6): 14-16, 50.
(责任编辑:张培培)
