一种固定翼无人机气体发射系统分析设计
2025-02-09李响李强王腾王少泉张诗雨



摘 要:为了满足无人机助推架的研制需求,设计了一种以高压二氧化碳气体驱动的适用于固定翼无人机的可拆卸式发射助推架。结合气体炮内弹道方程,建立了气体发射的数学模型,通过理论计算和利用动力学仿真软件ADAMS对设计的三维模型进行仿真,得到了不同质量无人机发射时的初速、过载、位移等变化规律。结果显示,通过仿真得到的无人机离开发射架时的初速、位移、过载变化曲线与理论计算结果高度一致,验证了计算与仿真的正确性。研究结果表明,该固定翼无人机助推发射架在不超过最大过载的情况下,能够成功发射14 kg及以下无人机并达到起飞初速,仿真结果与理论计算误差不超过3%。研究结果可进一步为气体发射提供理论指导。
关键词:无人机;发射架;气体发射;结构设计;动力学仿真
中图分类号:V279; V553 文献标志码:A DOI:10.3969/j.issn.1673-3819.2025.01.004
Analysis and design of a fixed wing unmanned aerial vehicle gas launching system
LI Xiang, LI Qiang, WANG Teng, WANG Shaoquan, ZHANG Shiyu
(College of Mechanical and Electrical Engineering, North University of China, Taiyuan 030051, China)
Abstract:In order to meet the development requirements of unmanned aerial vehicle (UAV) boosters, a detachable launch booster for fixed wing UAVs was designed, which is driven by high-pressure carbon dioxide gas. A mathematical model for gas launch was established based on the internal ballistic equation of the gas cannon. Through theoretical calculations and the use of dynamic simulation software ADAMS to simulate the designed 3D model, the variation laws of initial velocity, overload, displacement, etc. during the launch of unmanned aerial vehicles of different masses were obtained. The results show that the initial velocity, displacement, and overload variation curves obtained through simulation when the drone leaves the launch pad are highly consistent with the theoretical calculation results, verifying the correctness of the calculation and simulation. The research results indicate that the fixed wing unmanned aerial vehicle (UAV) booster launcher can successfully launch UAVs weighing 14 kg or less and achieve initial takeoff speed without exceeding maximum overload. The simulation results have an error of no more than 3% compared to theoretical calculations. The research results can further provide theoretical guidance for gas emission.
Key words:UAV; launch frame; gas emission; structural design; dynamics simulation
随着近些年电子技术、人工智能、通信技术、自动控制等的快速发展,无人机(unmanned aerial vehicle,UAV)的发展前景也被人们愈发关注,其在军用和民用领域的作用也愈发突出。在民用领域,无人机广泛应用于航拍、新闻报道、交通监测、森林防火、地质测绘、电力巡检、农业植保等方面。在军用领域,无人机既可执行枯燥乏味的中继通信、边境巡逻、高空监测等任务,也可以在危险环境中执行超低空飞行、电子对抗、对敌火力压制、自杀式攻击等任务。
无人机的发射方式多种多样,可以采用手抛发射、弹射发射、零长发射、垂直起降、容器发射、火箭助推等。质量较大的无人机通常需要其他辅助动力来使其达到起飞所需要的速度,与以传统的火药作为高压动力的推动装置相比,气体发射的初速便于调节,发射惯性小,避免了火药操作的危险性和对发射筒的烧蚀等传统火药发射的缺点[1]。
目前,国内现有的气体发射通常应用于通过容器直接发射质量体积均较小的折叠翼无人机,但不能满足质量体积较大且无法折叠置于发射容器内的固定翼无人机的发射需求。
为了满足无人机的发射需求,现设计一种固定翼无人机发射助推架。在无人机外形结构确定的情况下,无人机助推发射系统的设计主要集中在两个方面:一是计算气体发射的相关参数,使无人机能够达到起飞所需的速度,同时不超过无人机能承受的安全过载;二是设计发射架的结构,使无人机在起飞时与发射架可以分离[2-4]。本文设计了一种大型固定翼无人机发射架方案,并对其做了相关的仿真分析。
1 无人机发射架的方案及建模
发射架采用活塞式气压弹射方案,先把发射底座后拉至初始位置,并插入安全销;储气瓶充入高压气,气缸安装在发射架下方。发射时,除去安全销,打开释放机构,当打开气阀后,高压气体迅速充满活塞内腔体,使活塞受力突然增大,活塞在高压二氧化碳气体的作用下迅速加速向前并拉动钢丝绳,活塞运行到终点时撞击缓冲垫,停止工作。由于钢丝绳上的拉力及导轨与水平面存在一定的夹角,钢丝绳沿导轨向前的分力和螺旋桨的推力共同作用,带动底座和无人机向前加速运动。当底座达到最大速度并撞击缓冲装置开始减速时,无人机由于自身惯性和螺旋桨的推力,可以脱离滑车继续前进,同时在发射底座运动到导轨末端时,速度达到无人机起飞的需求,无人机产生升力,与发射架前倒伏机构解锁,发射时前端支撑随着无人机的运动向前倒下,以避开机体后面的螺旋桨尾翼,完成发射[5-6],如图1、图2所示。
2 气体发射无人机理论分析
2.1 基本假设
气体发射能量来源于高压气体的内能,即高压气体推动活塞筒内的活塞杆[7],内能转化为气体和活塞杆的平动动能、摩擦产生的热能等,如果细致考虑发射过程中各个方面的影响,会使得计算工作异常复杂。为了能够更好地描述这一物理过程,做出如下基本假设:
(1)假设阀门是在瞬间完全开启;
(2)假设工作介质为理想气体,气体流动和活塞杆运动都是轴向运动;
(3)不考虑气体沿气室壁面流动的摩擦阻力和气体内摩擦,即忽略气体的粘滞性;
(4)从控制阀打开到活塞杆运动到出口的过程在极短的时间内完成,忽略气体与壁面的热交换,假设气体的运动为理想气体的绝热膨胀过程;
(5)假设发射装置密封良好,不存在漏气现象;
(6)引入虚拟质量系数来考虑活塞杆膛内运动时的摩擦及其他能量损耗[8]。
2.2 工作原理
气体发射无人机结构简图如图3所示,活塞杆的一端位于活塞筒与阀门连接的起始位置,另一端与动滑轮连接,阀门在初始状态下处于关闭状态,向气室内充气直到其初始压力达到P0,此时通过电控开关打开阀门,高压二氧化碳气体通过阀门进入活塞筒作用在活塞杆上,推动活塞杆向前加速运动,由于无人机不能承受过高的过载,同时又要达到很高的起飞初速,通过动滑轮与定滑轮的滑轮组来实现发射过程,无人机起飞初速为V0。
2.3 数学模型的建立
在火炮内弹道与气体炮内弹道理论中,应用了虚拟质量系数与次要功系数来代替气体功效的损耗与其他能量损失,由此引入修正系数φ来修正气体做功的能量损失,滑轮、钢绳与发射架之间摩擦及其他能量散失项。
通过以上公式建立起了气体发射的数学模型,描绘了无人机发射架的整个动力学过程。
3 数值计算分析
利用Matlab软件,采用四阶龙格-库塔法,分别对无人机质量为10 kg、14 kg、18 kg三种情况的气体发射性能进行计算,得到了无人机离开发射架时的位移与时间的变化曲线;无人机离开发射架时初速与时间的变化曲线;膛内压力随时间的变化曲线;过载随时间的变化曲线。计算结果如图5—8所示。
由上图可以得到:在其他条件都相同的情况下,发射10 kg、14 kg、18 kg三种不同质量的无人机,无人机与发射架分离时三种无人机的初速分别为22.62 m/s、20.13 m/s、18.27 m/s;无人机达到4 m行程所需的时间分别为0.338 s、0.379 s、0.418 s;活塞杆离开活塞筒出口端面的膛压均相同;无人机承受的最大过载分别为7.50g、5.94g、4.90g。
分析上图可知,无人机质量与发射初速和承受过载成反比,在限制初始压力为4 MPa的情况下,能够发射的无人机的最大质量为14 kg,初速可以达到20 m/s而过载不超过8g。对于小于14 kg的情况,承受过载会变大,但降低气室初始压力可以使过载也满足要求,这一点可以轻松实现,因此该助推架可发射不超过14 kg的无人机。
如要使更高质量无人机满足发射指标,则需增大活塞筒的口径或给予更高的气室初始压力。
4 无人机发射架的动力学仿真
4.1 模型假设
为了便于研究,对动力学仿真模型进行了如下假设:
(1)仿真模型中无人机及架体均视为刚体,质心和形状均不会发生改变;
(2)不考虑风的影响。
在基于假设的情况下,对无人机的起飞初速、行进方向位移、无人机的过载以及无人机是否能够顺利离开发射架进行动力学仿真分析。
4.2 模型导入及约束添加
在本次仿真方案中,分别对10 kg、14 kg、18 kg三种不同质量的无人机进行了仿真分析。
将UG软件设计好的三维模型进行简化,对大量部件组成的装配体进行处理,通过合并体与删除非必要部件来简化仿真模型,将处理后的模型导入ADAMS中。
仿真模型采用笛卡尔坐标系,以底座的质心为坐标原点,无人机前进方向为X轴正向,垂直向上方向为Z轴正向,无人机水平向左方向为Y轴正向[10-11]。
架体整体结构与大地用固定副连接;活塞杆与动滑轮用固定副连接并与活塞筒创建接触;三个滑轮之间用Adams Machinery中的绳索机构连接,设置好滑轮的锚点数量、滑轮属性、布置位置、绳索的属性和缠绕方向;底座上的滑轮与底座之间添加转动副并与架体上的轨道创建接触;倒伏机构与底座之间为旋转关系,添加转动副;无人机与底座、倒伏机构主体、卡扣之间均创建接触;卡扣与倒伏机构主体通过卡口转轴连接,为旋转关系,添加转动副;底座运动到预定行程后会与缓冲装置发生碰撞,底座与缓冲装置之间创建接触;缓冲装置两个面之间创建拉压弹簧阻尼器。
4.3 仿真初始条件的输入
将Matlab计算所得的气动压力与时间的数据导入ADAMS中创建样条曲线,将力施加到活塞杆上,调用样条曲线AKISPL(TIME,0,SPLINE_1,0)。
采用脚本来控制无人机升力的产生,对无人机质心位置创建测量MEA_1,创建传感器SENSOR对MEA_1进行评估,当无人机质心行程达到4 m时,触发事件,终止当前仿真步并继续仿真脚本。
建立新的仿真脚本,设置功能,先进行0.5 s仿真,步数设置200步,激活升力,接着进行0.5 s动力学仿真,步数设置1 000步,输入控制语句,如图9、图10所示。
4.4 仿真结果及分析
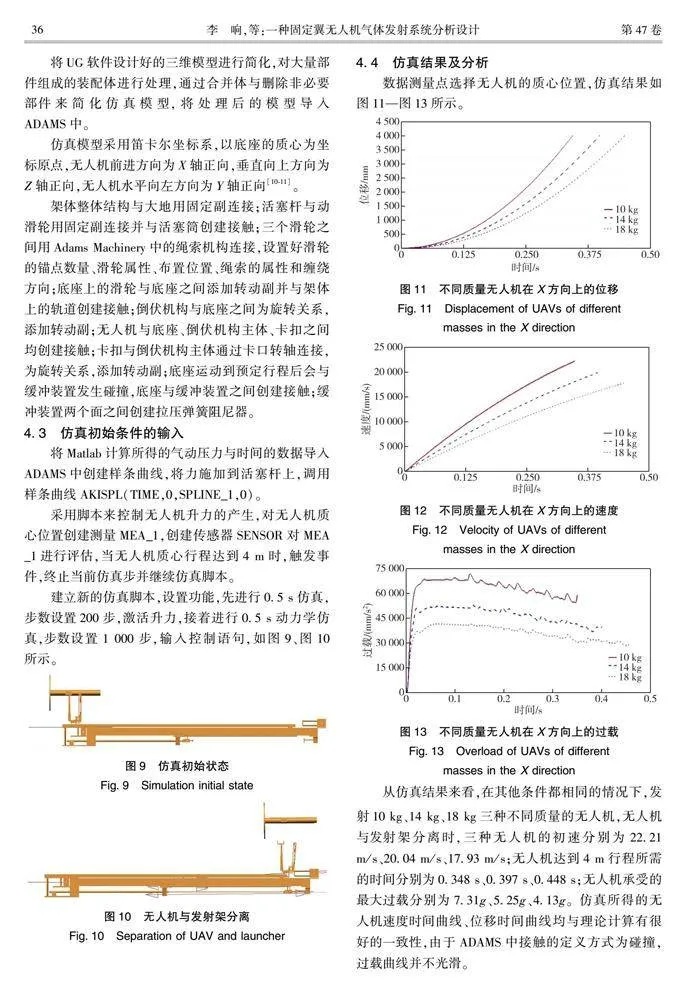
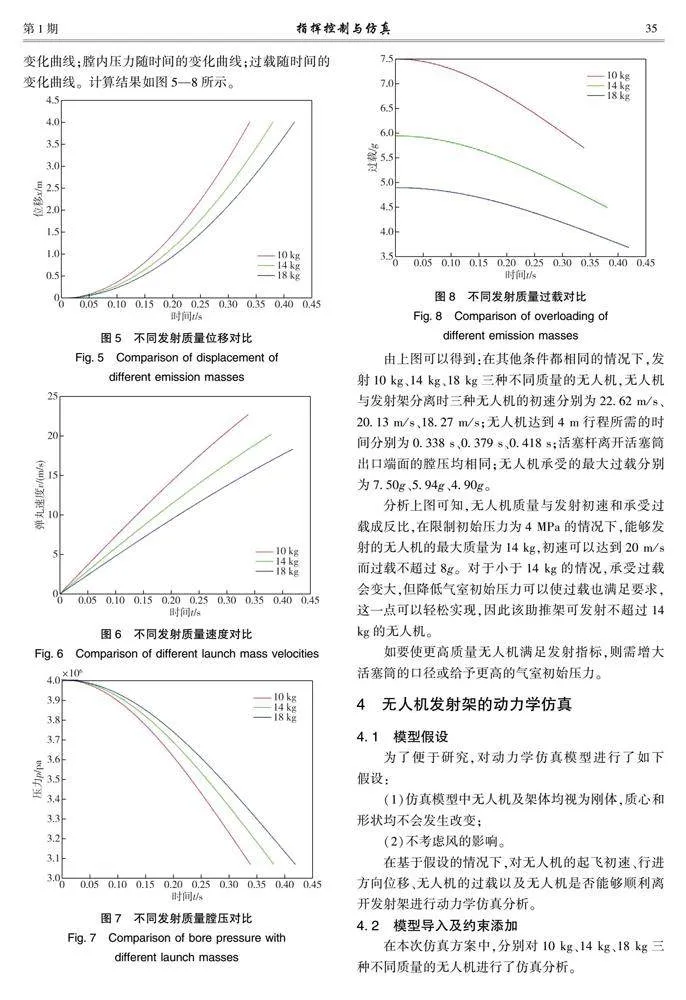
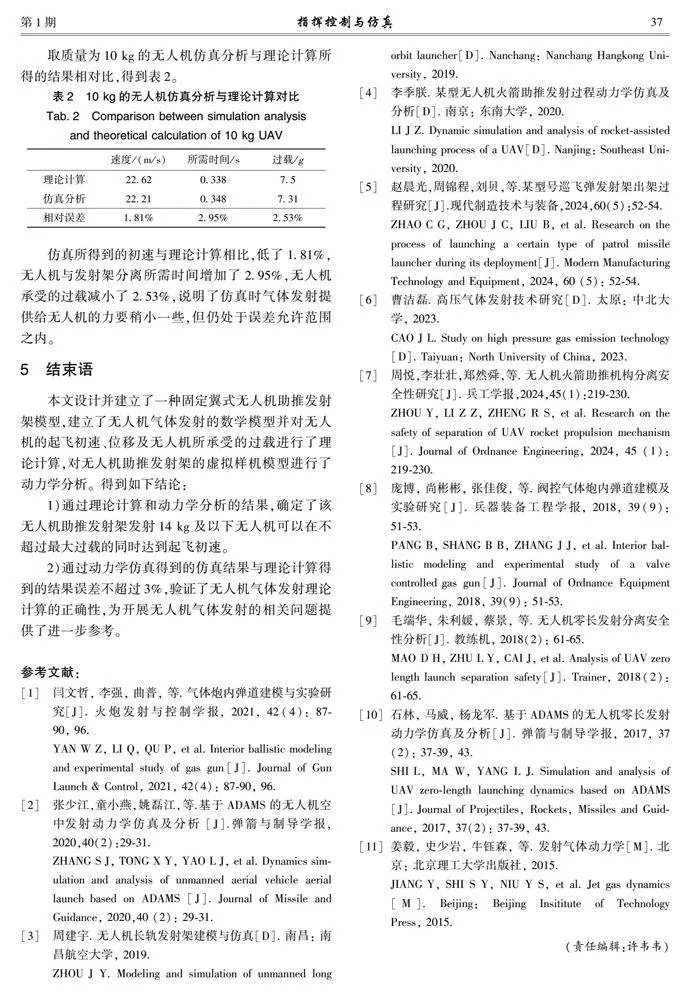
数据测量点选择无人机的质心位置,仿真结果如图11—图13所示。
从仿真结果来看,在其他条件都相同的情况下,发射10 kg、14 kg、18 kg三种不同质量的无人机,无人机与发射架分离时,三种无人机的初速分别为22.21 m/s、20.04 m/s、17.93 m/s;无人机达到4 m行程所需的时间分别为0.348 s、0.397 s、0.448 s;无人机承受的最大过载分别为7.31g、5.25g、4.13g。仿真所得的无人机速度时间曲线、位移时间曲线均与理论计算有很好的一致性,由于ADAMS中接触的定义方式为碰撞,过载曲线并不光滑。
取质量为10 kg的无人机仿真分析与理论计算所得的结果相对比,得到表2。
仿真所得到的初速与理论计算相比,低了1.81%,无人机与发射架分离所需时间增加了2.95%,无人机承受的过载减小了2.53%,说明了仿真时气体发射提供给无人机的力要稍小一些,但仍处于误差允许范围之内。
5 结束语
本文设计并建立了一种固定翼式无人机助推发射架模型,建立了无人机气体发射的数学模型并对无人机的起飞初速、位移及无人机所承受的过载进行了理论计算,对无人机助推发射架的虚拟样机模型进行了动力学分析。得到如下结论:
1)通过理论计算和动力学分析的结果,确定了该无人机助推发射架发射14 kg及以下无人机可以在不超过最大过载的同时达到起飞初速。
2)通过动力学仿真得到的仿真结果与理论计算得到的结果误差不超过3%,验证了无人机气体发射理论计算的正确性,为开展无人机气体发射的相关问题提供了进一步参考。
参考文献:
[1] 闫文哲, 李强, 曲普, 等. 气体炮内弹道建模与实验研究[J]. 火炮发射与控制学报, 2021, 42(4): 87-90, 96.YAN W Z, LI Q, QU P, et al. Interior ballistic modeling and experimental study of gas gun[J]. Journal of Gun Launch amp; Control, 2021, 42(4): 87-90, 96.
[2] 张少江,童小燕,姚磊江,等.基于ADAMS的无人机空中发射动力学仿真及分析 [J].弹箭与制导学报, 2020,40(2):29-31. ZHANG S J, TONG X Y, YAO L J, et al. Dynamics simulation and analysis of unmanned aerial vehicle aerial launch based on ADAMS [J]. Journal of Missile and Guidance, 2020,40 (2): 29-31.
[3] 周建宇. 无人机长轨发射架建模与仿真[D]. 南昌: 南昌航空大学, 2019.ZHOU J Y. Modeling and simulation of unmanned long orbit launcher[D]. Nanchang: Nanchang Hangkong University, 2019.
[4] 李季朕. 某型无人机火箭助推发射过程动力学仿真及分析[D]. 南京: 东南大学, 2020.LI J Z. Dynamic simulation and analysis of rocket-assisted launching process of a UAV[D]. Nanjing: Southeast University, 2020.
[5] 赵晨光,周锦程,刘贝,等.某型号巡飞弹发射架出架过程研究[J].现代制造技术与装备,2024,60(5):52-54. ZHAO C G, ZHOU J C, LIU B, et al. Research on the process of launching a certain type of patrol missile launcher during its deployment[J]. Modern Manufacturing Technology and Equipment, 2024, 60 (5): 52-54.
[6] 曹洁磊. 高压气体发射技术研究[D]. 太原: 中北大学, 2023.CAO J L. Study on high pressure gas emission technology[D]. Taiyuan: North University of China, 2023.
[7] 周悦,李壮壮,郑然舜,等. 无人机火箭助推机构分离安全性研究[J]. 兵工学报,2024,45(1):219-230.ZHOU Y, LI Z Z, ZHENG R S, et al. Research on the safety of separation of UAV rocket propulsion mechanism [J]. Journal of Ordnance Engineering, 2024, 45 (1): 219-230.
[8] 庞博, 尚彬彬, 张佳俊, 等. 阀控气体炮内弹道建模及实验研究[J]. 兵器装备工程学报, 2018, 39(9): 51-53.PANG B, SHANG B B, ZHANG J J, et al. Interior ballistic modeling and experimental study of a valve controlled gas gun[J]. Journal of Ordnance Equipment Engineering, 2018, 39(9): 51-53.
[9] 毛端华, 朱利媛, 蔡景, 等. 无人机零长发射分离安全性分析[J]. 教练机, 2018(2): 61-65.MAO D H, ZHU L Y, CAI J, et al. Analysis of UAV zero length launch separation safety[J]. Trainer, 2018(2): 61-65.
[10]石林, 马威, 杨龙军. 基于ADAMS的无人机零长发射动力学仿真及分析[J]. 弹箭与制导学报, 2017, 37(2): 37-39, 43.SHI L, MA W, YANG L J. Simulation and analysis of UAV zero-length launching dynamics based on ADAMS[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2017, 37(2): 37-39, 43.
[11]姜毅, 史少岩, 牛钰森, 等. 发射气体动力学[M]. 北京: 北京理工大学出版社, 2015.JIANG Y, SHI S Y, NIU Y S, et al. Jet gas dynamics[M]. Beijing: Beijing Insititute of Technology Press, 2015.
(责任编辑:许韦韦)
