不确定态势下无人机群协同作战效能评估
2025-02-09孙鹏耀黄炎焱王凯生吴奎

摘 要:针对不确定态势下无人机群作战效能评估问题,构建了一套基于作战过程仿真的无人机群作战效能评估方法。首先,从作战环角度分析无人机群察打任务作战过程;其次,根据作战环的各个步骤设计战法计算,结合设计的参数设置、战场态势生成与记录、全局进度控制器、作战数据记录等模块形成完整的无人机群察打作战过程仿真系统;然后,依据获得的作战过程仿真结果数据,构建核心效能指标与辅助效能指标,给出各指标的计算与耦合方法;最后,通过案例实验,对采用不同编配方案的无人机群进行作战过程仿真,评估分析作战效能,验证了本文方法的可行性,可实现不确定态势下无人机群作战效能的有效评估。
关键词:无人机群;不确定态势;作战过程仿真;作战循环;作战效能
中图分类号:TP391.9 文献标志码:A DOI:10.3969/j.issn.1673-3819.2025.01.002
Evaluation of combat effectiveness of unmanned aerial
vehicle group in uncertain situations
SUN Pengyao HUANG Yanyan WANG Kaisheng WU Kui
(1. School of Automation, Nanjing University of Science and Technology, Nanjing 210014;
2. Jiangsu Automation Research Institute, Lianyungang 222061, China)
Abstract: A set of unmanned aerial vehicle (UAV) swarm combat effectiveness evaluation methods based on combat process simulation is constructed to address the issue of UAV swarm combat effectiveness evaluation in uncertain situations. Firstly, analyze the operational process of unmanned aerial vehicle (UAV) reconnaissance and strike missions from the perspective of closed-loop combat environment. Secondly, design a combat method calculation module based on the various steps of the closed-loop combat environment, and combine the designed parameter setting module, battlefield situation generation and recording module, global progress controller, and combat data recording module to form a complete simulation system for unmanned aerial vehicle group observation and combat process. Then, based on the available simulation data of the combat process, construct core effectiveness indicators and auxiliary effectiveness indicators, and provide a calculation and coupling method for each indicator. Finally, a scenario is set up to simulate the combat process of unmanned aerial vehicle swarms using different deployment schemes, evaluate and analyze the combat effectiveness, verify the feasibility of the proposed method, and achieve effective evaluation of the combat effectiveness of unmanned aerial vehicle swarms under uncertain situations.
Key words:unmanned aerial vehicle group; uncertain situation; combat process simulation; combat cycle; combat effectiveness
在以俄乌冲突为代表的近年战争中,无人机群承担的战场突击作用愈加凸显[1-2],无人机群协同作战正成为未来作战中备受关注的作战样式之一,有效评估无人机群作战效能是合理运用无人机群的重要前提[3]。所谓机群作战效能,即在某对抗态势情况下,多机通过作战策略将单机任务能力耦合从而涌现出的群体任务能力,作战效能的涌现是多因素耦合影响的结果,同时受单机性能、作战策略、任务强度等因素影响。目前对作战效能的评估方法主要包括模糊评判法[4-5]、层次分析法[6-7]、ADC法[8-9]等传统方法以及基于神经网络[10]、机器学习[11]等人工智能技术的相关方法[12]。上述方法各有特点,但在不确定态势情况下难以准确刻画无人机群各作战能力要素之间的耦合关系以及攻防对抗过程中的随机性,因此这些方法具有局限性。除此之外,现代作战的动态性、对抗性以及不确定性也影响了无人机群的作战效能。大量新质力量的产生,使得不能再通过单纯地叠加不同武器装备的作战能力来评估其整体效能。因此,本文面向战场态势不确定的情况,考虑作战中的对抗行动、战场态势等不确定因素,提出基于作战过程仿真的无人机群协同作战效能评估方法。首先结合OODA作战循环理论分析无人机群执行典型察打任务的过程;其次,基于作战环闭环过程建立无人机群作战过程仿真系统;再次,结合仿真系统中拟获取的结果数据设计核心效能指标与辅助效能指标,给出无人机群协同作战效能评估计算方法;最后,通过想定案例验证了评估方法的可行性,为不确定态势下无人机群协同作战效能评估提供了新的思路。
1 无人机群察打任务作战过程分析
要建立无人机群作战过程仿真系统,首先需要先对无人机群的作战过程进行分析。考虑协同察打任务是无人机群未来主要的作战任务之一,因此从协同察打任务入手进行分析。无人机群执行察打任务本质上就是机群通过各机搭载的装备设备,按照一定的战法策略,对目标实现侦察、识别、决策、打击这一OODA作战环闭环的过程,以求实现发现即摧毁的作战效果。
在无人机群协同作战中,由于协同机制的加入,目标侦察由单机侦察变为基于全局信息融合的系统侦察,各单机的任务目标序列也由战前筹划执行的行动方案转变成由全局任务协调来进行动态调整的方式。系统侦察提高了各无人机对目标实现有效侦察识别的概率,一方面降低了无人机侦察目标消耗的时间,提高了整体的作战效率,另一方面,也使得无人机对战场态势的感知更加精准正确,从而能够花费与目标态势相吻合的弹药资源以实现对目标的精确毁伤;统一任务协调通过协同策略对无人机的任务执行顺序进行优化,提高无人机打击资源的利用效率,一定程度上减少了整个编队的补给次数,实现无人机群同时对更多目标的打击毁伤,无人机群协同察打作战循环过程如图1所示。
通过上述分析可知,无人机群察打任务作战过程就是通过各单机作战循环链条的不断闭环,实现对指定目标的侦察打击,直到各无人机完成各自的察打任务,无人机群的整体作战效能其实是源自各无人机作战循环链闭环能力。除了无人机单机能力的影响,统一任务协调策略的优劣与全局信息融合方法的结果也进一步影响了作战循环链的闭环情况。因此,本文以无人机群作战闭环包含的侦察、识别、决策、打击这四个步骤为基础,设计面向不确定态势条件下无人机群执行协同察打任务的作战过程仿真系统。
2 无人机群察打作战过程仿真系统设计
无人机群作战仿真系统的本质功能在于依据某种全局推进策略,将作战全过程划分为多个节点,在输入无人机参数模型、战场态势模型后,通过设置的作战规则计算当前作战任务序列,按照全局推进的顺序对每一个节点处的无人机状态与战场敌方状态信息进行计算更新,在每个节点处,无人机会开始执行侦察、识别、决策、打击四类动作中的一个或多个动作,以实现对每个无人机的作战环闭合过程的逐步仿真,同时,敌方作战单元可能会执行反无人机动作,以实现战场的对抗过程仿真。因此,设计仿真系统的模块组成主要包括全局进度控制器、参数设置模块、战场态势数据库、作战数据库、作战规则与算法库。
2.1 参数设置模块
参数设置模块的功能是对战场环境参数、无人机群性能参数、目标分布与抗毁能力等进行预设,由于可能存在不确定的态势信息,因此,在本文设计的参数设置模块中,许多参数只需要设置其取值范围,仿真系统根据该范围进行随机取值,从而实现对不确定战场态势的有效模拟,本文对该模块中包含的参数类型设置如下。
CS=〈ZC,FC,GC,MC〉
ZC={zcx,zcy,zcr}
FC={jcx,jcy,fn,fv,fza,fzr,fzz,,fdn,fdr,fdz}
GC={gn,gkn,gfkn,gfka,gfkr,gfkz} (1)
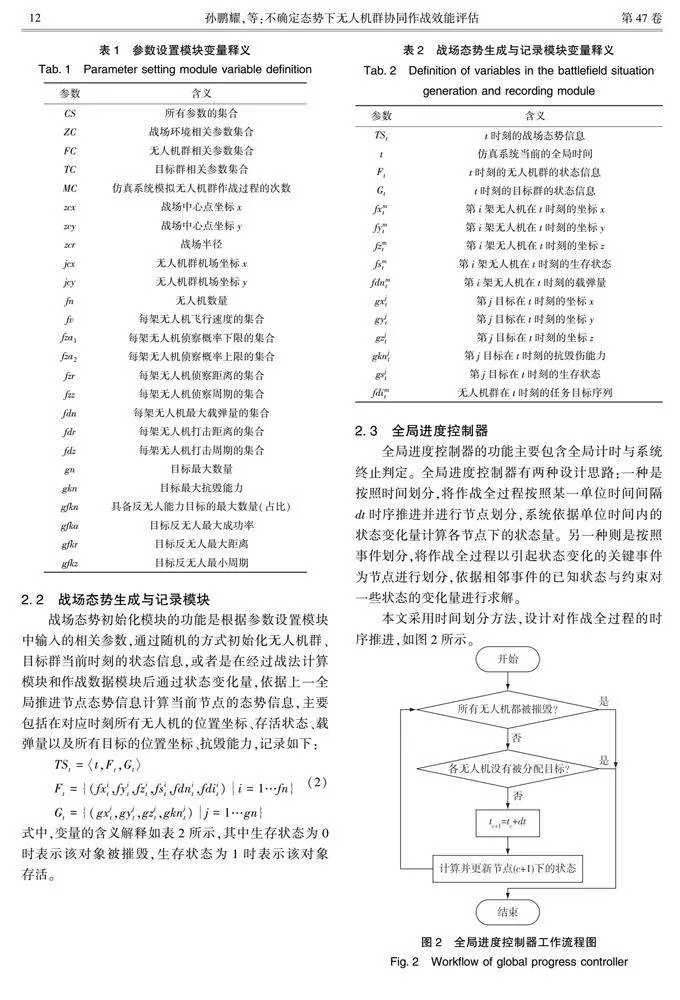
式中变量的含义解释如表1所示。
2.2 战场态势生成与记录模块
战场态势初始化模块的功能是根据参数设置模块中输入的相关参数,通过随机的方式初始化无人机群、目标群当前时刻的状态信息,或者是在经过战法计算模块和作战数据模块后通过状态变化量,依据上一全局推进节点态势信息计算当前节点的态势信息,主要包括在对应时刻所有无人机的位置坐标、存活状态、载弹量以及所有目标的位置坐标、抗毁能力,记录如下:
2.3 全局进度控制器
全局进度控制器的功能主要包含全局计时与系统终止判定。全局进度控制器有两种设计思路:一种是按照时间划分,将作战全过程按照某一单位时间间隔dt时序推进并进行节点划分,系统依据单位时间内的状态变化量计算各节点下的状态量。另一种则是按照事件划分,将作战全过程以引起状态变化的关键事件为节点进行划分,依据相邻事件的已知状态与约束对一些状态的变化量进行求解。
本文采用时间划分方法,设计对作战全过程的时序推进,如图2所示。
首先检测无人机的毁伤情况,如果无人机都被摧毁,则直接结束仿真流程,若存在可以作战的无人机,此时检测作战任务序列,若作战任务序列为空,表示作战任务已经全部完成,则终止系统;否则进入下一时序节点,进行下一节点的计算。
2.4 作战数据记录模块
2.5 战法计算模块
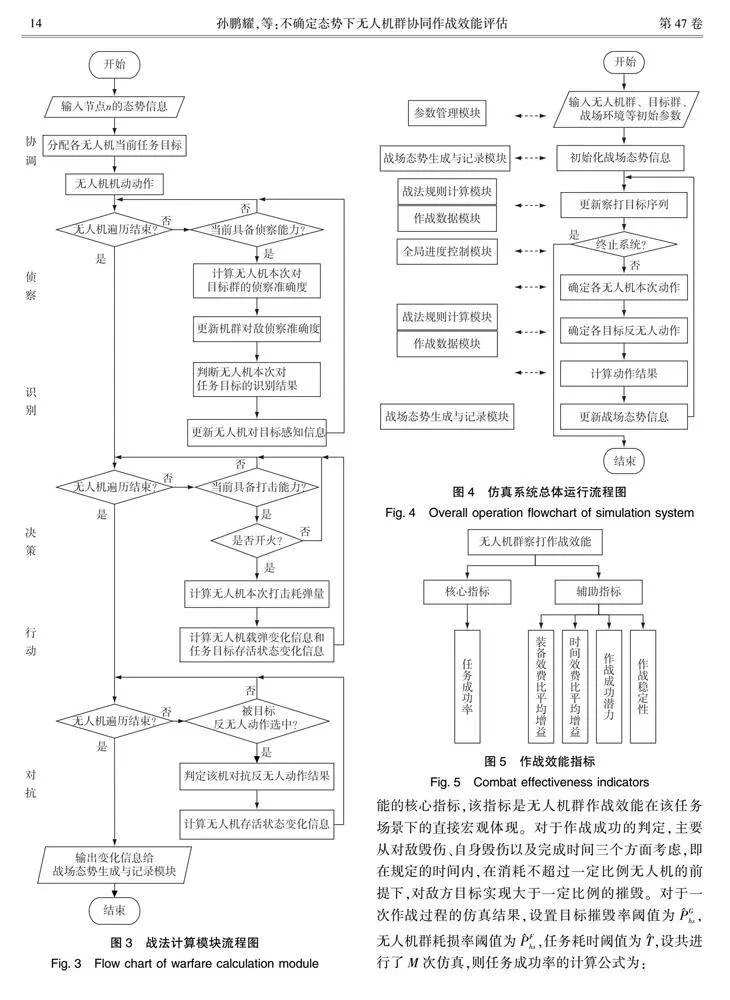
战法计算模块的核心是设计符合OODA作战环闭合过程的作战计算流程以及相应的计算方法,以此计算出作战数据模块中包含的相关作战过程数据,提供给战场态势生成与记录模块,更新并记录相关态势信息。作战计算模块主要由任务分配、机群侦察、对敌识别、开火决策、毁伤动作以及对抗反无人动作六个部分组成。设全局节点n的战场态势已生成,现需解算节点n+1时态势,各部分运行流程如图3所示。
任务分配和机群侦察是体现无人机群协同作战策略的主要部分,分别对应任务分配方法与机群侦察融合方法,通过配置不同任务分配和机群侦察方法,能够实现不同协同策略下的无人机作战过程仿真,模块化设计使得系统具有一定的可扩展性。对敌识别、开火决策、毁伤动作以及对抗反无人动作主要体现无人机或目标的自身能力,主要是通过判定以及执行动作使得无人机群与目标的状态发生变化。同时通过设置侦察识别概率,使得无人机群对目标的感知情况有可能与目标真实状态不相同,进而影响无人机的开火决策计算结果,这一设计更符合战场目标具有一定未知性的客观事实。
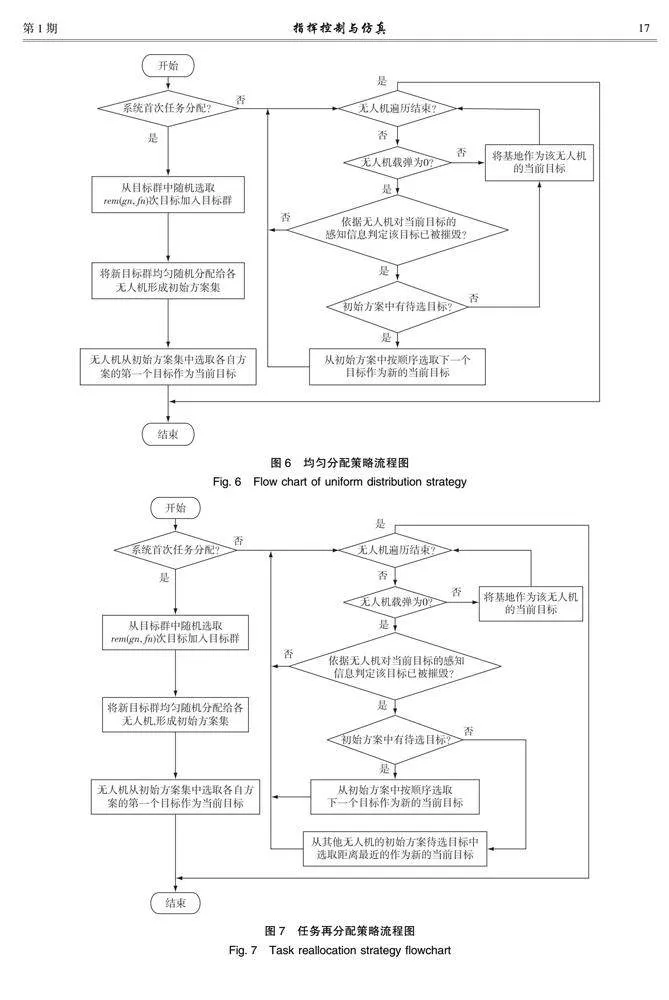
2.6 仿真系统运行流程
结合上文设计的各个模块,给出系统完整运行流程图,如图4所示。
完整的仿真系统被解耦为五个独立的模块,且其中的各个模块可根据实际仿真背景需求进行设计替换。模块化设计极大地提升了仿真系统的通用性与可扩展性。
3 无人机群作战效能评估模型
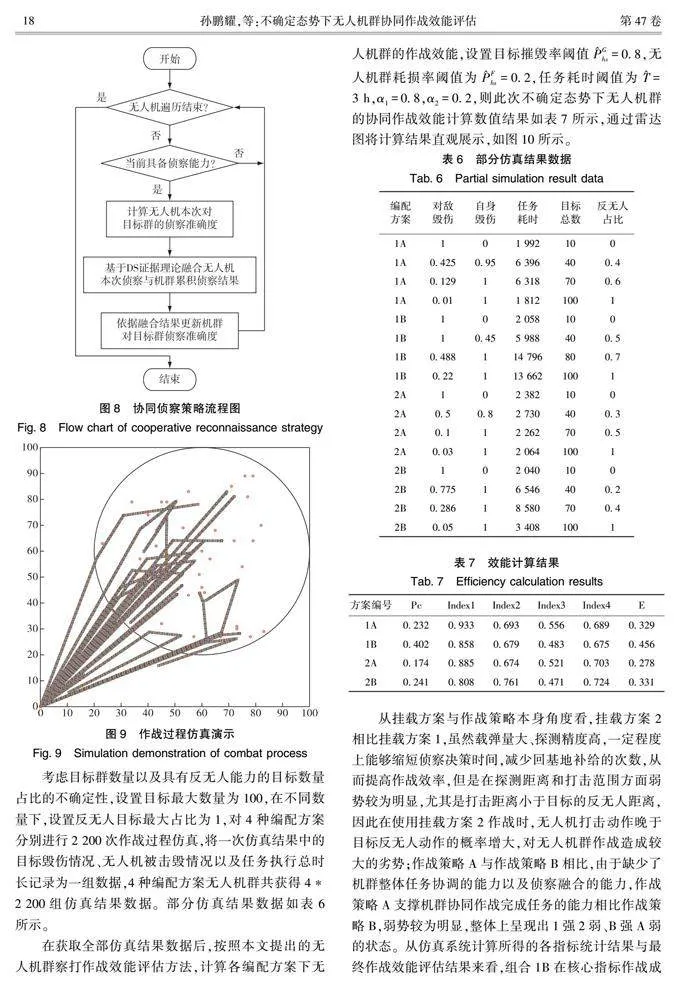
协同策略与无人单机的软硬结合实现了无人机群察打作战中的效能提升,作战结果是作战效能的最直接体现。运用仿真系统对无人机群进行作战仿真时,考虑战场态势的不确定性,每次仿真时,根据设置的战场态势参数,随机生成不同的战场态势信息,分别对采用不同力量-策略编配方案的无人机群进行作战过程仿真,记录得到作战结果仿真数据,通过统计分析处理,可以得到多组反映机群作战效能的指标评估参数,从而综合表征无人机群在相应不确定态势下的作战效能。本文设计的作战效能指标为作战成功率、装备效费比平均增益、时间效费比平均增益、作战成功潜力、作战稳定性,指标关系如图5所示。
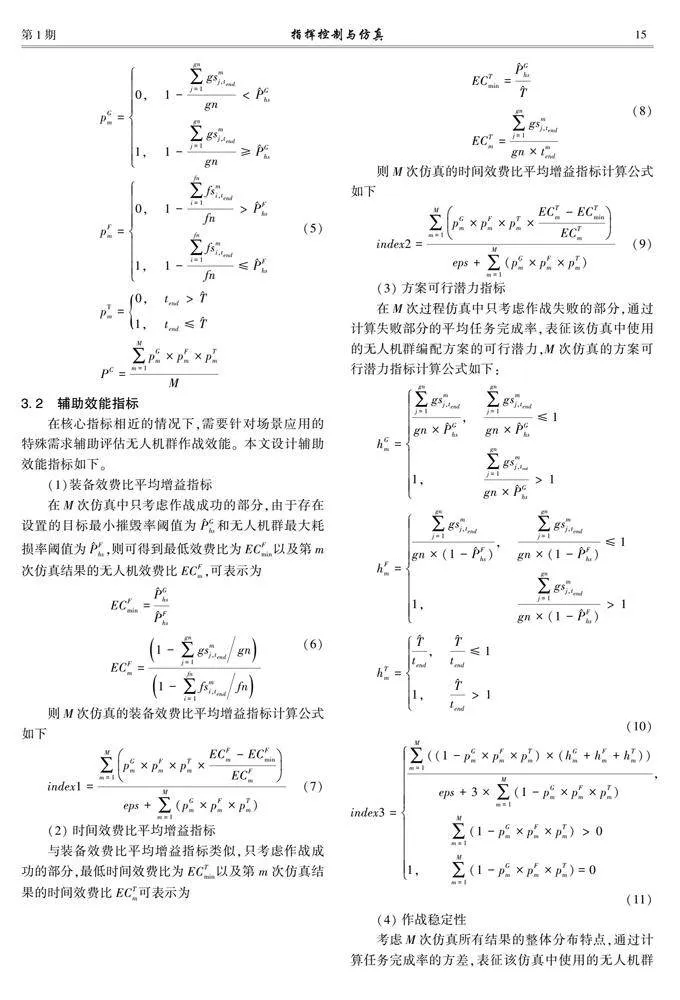
3.1 核心效能指标
3.2 辅助效能指标
评估结果可以通过结果清单或雷达图进行展示,指挥人员可以根据效能指标结果的对比选择合适的方案。
4 案例验证与结果分析
现设置具有态势不确定特点的无人机群察打任务作战想定案例,根据本文所提基于作战过程仿真的无人机群作战效能评估方法,对该作战案例中的无人机群作战效能进行评估分析。
4.1 想定概述
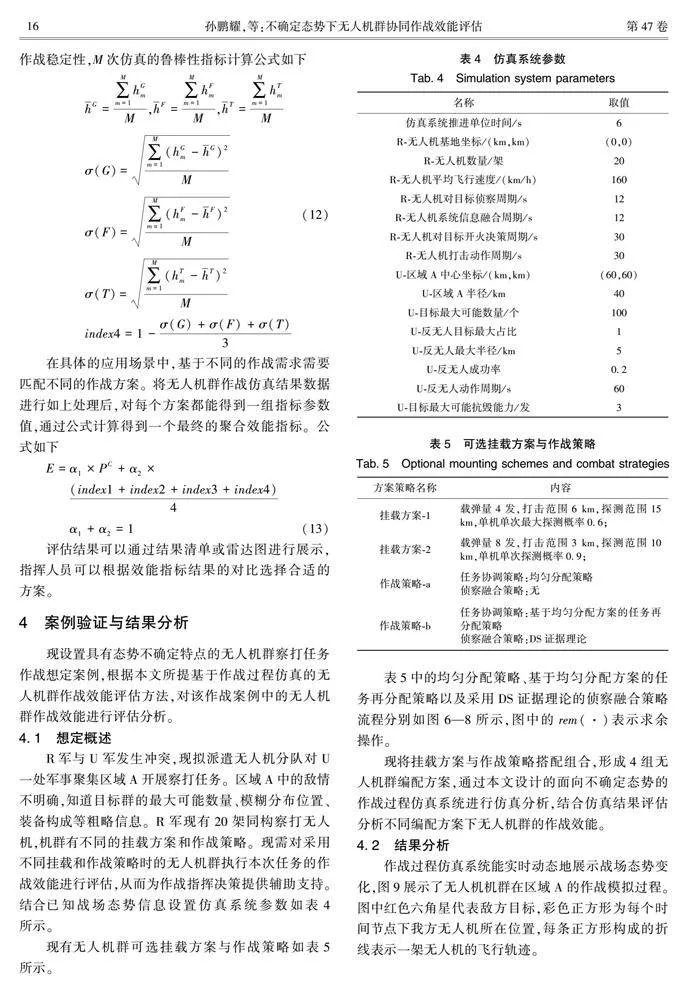
R军与U军发生冲突,现拟派遣无人机分队对U一处军事聚集区域A开展察打任务。区域A中的敌情不明确,知道目标群的最大可能数量、模糊分布位置、装备构成等粗略信息。R军现有20架同构察打无人机,机群有不同的挂载方案和作战策略。现需对采用不同挂载和作战策略时的无人机群执行本次任务的作战效能进行评估,从而为作战指挥决策提供辅助支持。结合已知战场态势信息设置仿真系统参数如表4所示。
现有无人机群可选挂载方案与作战策略如表5所示。
表5中的均匀分配策略、基于均匀分配方案的任务再分配策略以及采用DS证据理论的侦察融合策略流程分别如图6—8所示,图中的rem(·)表示求余操作。
现将挂载方案与作战策略搭配组合,形成4组无人机群编配方案,通过本文设计的面向不确定态势的作战过程仿真系统进行仿真分析,结合仿真结果评估分析不同编配方案下无人机群的作战效能。
4.2 结果分析
作战过程仿真系统能实时动态地展示战场态势变化,图9展示了无人机机群在区域A的作战模拟过程。图中红色六角星代表敌方目标,彩色正方形为每个时间节点下我方无人机所在位置,每条正方形构成的折线表示一架无人机的飞行轨迹。
考虑目标群数量以及具有反无人能力的目标数量占比的不确定性,设置目标最大数量为100,在不同数量下,设置反无人目标最大占比为1,对4种编配方案分别进行2 200次作战过程仿真,将一次仿真结果中的目标毁伤情况、无人机被击毁情况以及任务执行总时长记录为一组数据,4种编配方案无人机群共获得4*2 200组仿真结果数据。部分仿真结果数据如表6所示。
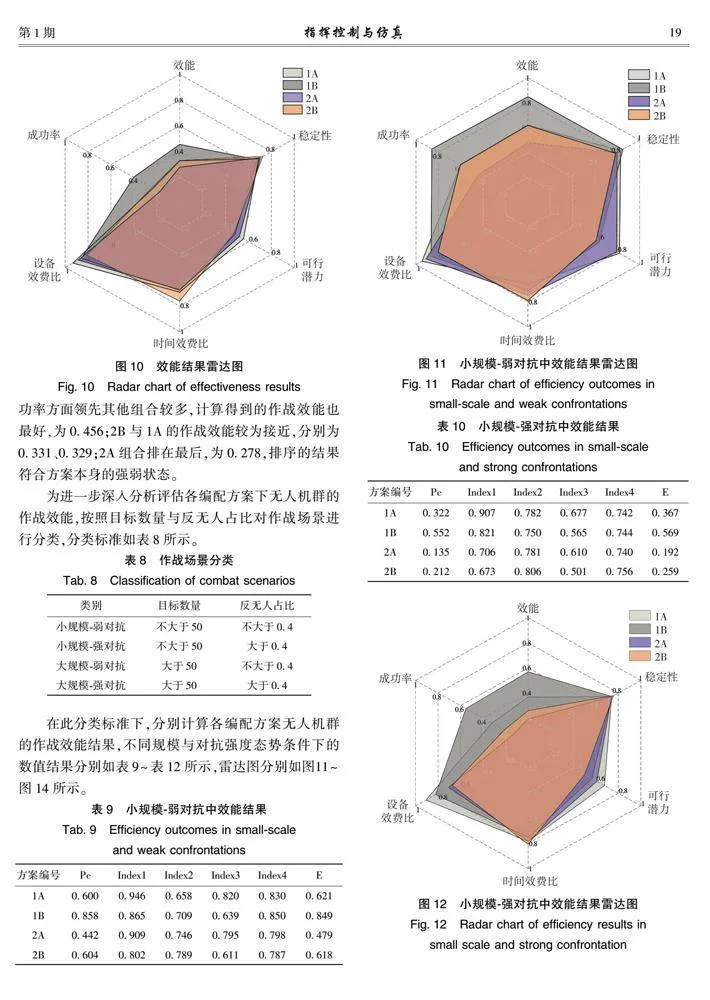
从挂载方案与作战策略本身角度看,挂载方案2相比挂载方案1,虽然载弹量大、探测精度高,一定程度上能够缩短侦察决策时间,减少回基地补给的次数,从而提高作战效率,但是在探测距离和打击范围方面弱势较为明显,尤其是打击距离小于目标的反无人距离,因此在使用挂载方案2作战时,无人机打击动作晚于目标反无人动作的概率增大,对无人机群作战造成较大的劣势;作战策略A与作战策略B相比,由于缺少了机群整体任务协调的能力以及侦察融合的能力,作战策略A支撑机群协同作战完成任务的能力相比作战策略B,弱势较为明显,整体上呈现出1强2弱、B强A弱的状态。从仿真系统计算所得的各指标统计结果与最终作战效能评估结果来看,组合1B在核心指标作战成功率方面领先其他组合较多,计算得到的作战效能也最好,为0.456;2B与1A的作战效能较为接近,分别为0.331、0.329;2A组合排在最后,为0.278,排序的结果符合方案本身的强弱状态。
为进一步深入分析评估各编配方案下无人机群的作战效能,按照目标数量与反无人占比对作战场景进行分类,分类标准如表8所示。
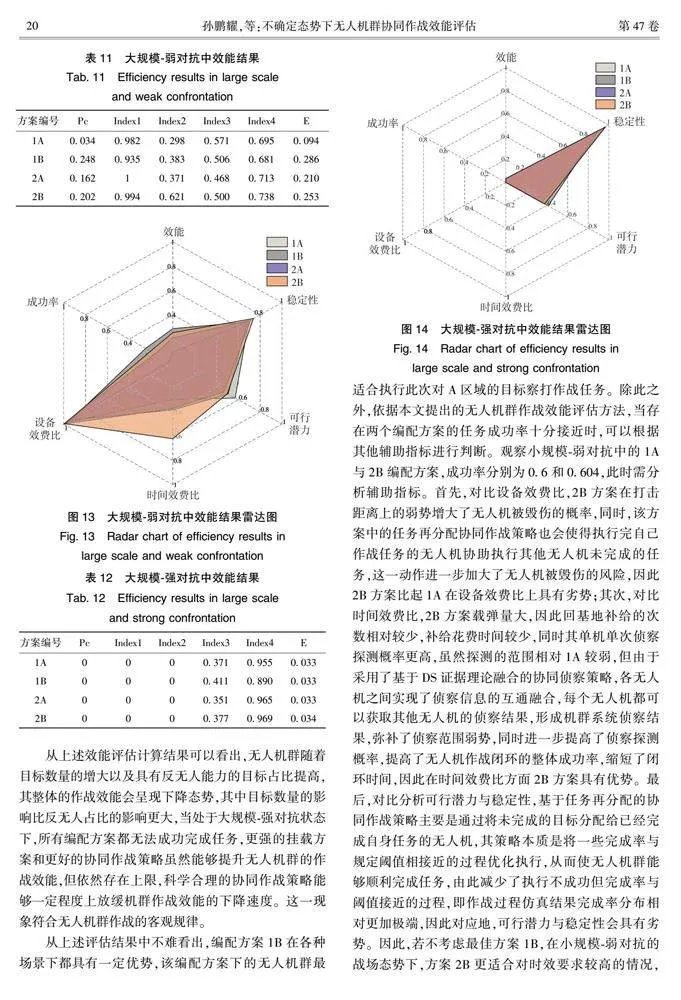
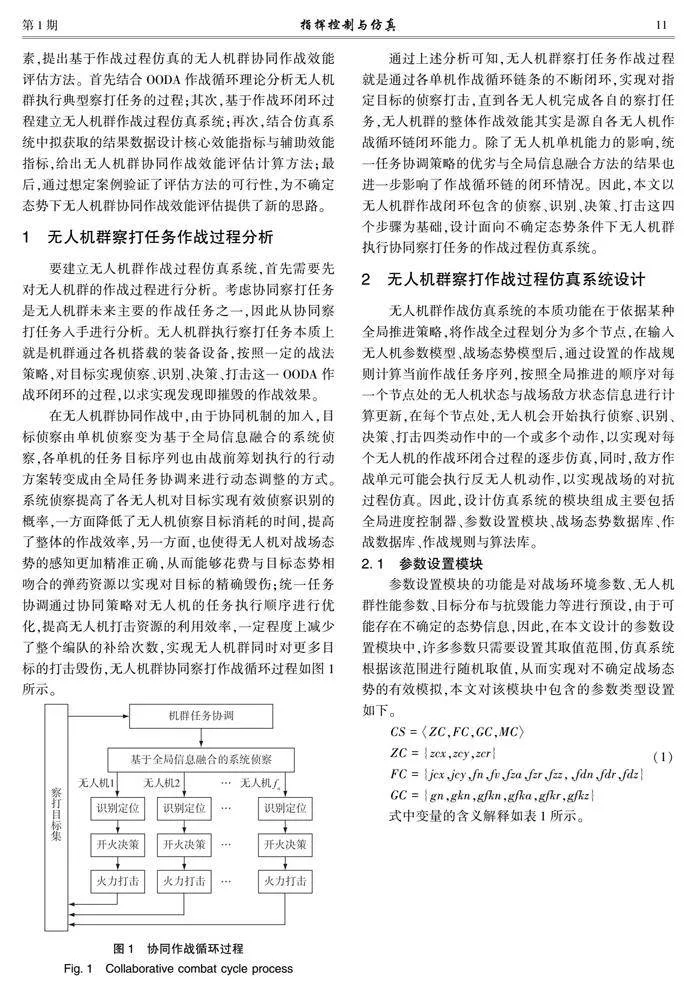
在此分类标准下,分别计算各编配方案无人机群的作战效能结果,不同规模与对抗强度态势条件下的数值结果分别如表9~表12所示,雷达图分别如图11~图14所示。
从上述效能评估计算结果可以看出,无人机群随着目标数量的增大以及具有反无人能力的目标占比提高,其整体的作战效能会呈现下降态势,其中目标数量的影响比反无人占比的影响更大,当处于大规模-强对抗状态下,所有编配方案都无法成功完成任务,更强的挂载方案和更好的协同作战策略虽然能够提升无人机群的作战效能,但依然存在上限,科学合理的协同作战策略能够一定程度上放缓机群作战效能的下降速度。这一现象符合无人机群作战的客观规律。
从上述评估结果中不难看出,编配方案1B在各种场景下都具有一定优势,该编配方案下的无人机群最适合执行此次对A区域的目标察打作战任务。除此之外,依据本文提出的无人机群作战效能评估方法,当存在两个编配方案的任务成功率十分接近时,可以根据其他辅助指标进行判断。观察小规模-弱对抗中的1A与2B编配方案,成功率分别为0.6和0.604,此时需分析辅助指标。首先,对比设备效费比,2B方案在打击距离上的弱势增大了无人机被毁伤的概率,同时,该方案中的任务再分配协同作战策略也会使得执行完自己作战任务的无人机协助执行其他无人机未完成的任务,这一动作进一步加大了无人机被毁伤的风险,因此2B方案比起1A在设备效费比上具有劣势;其次,对比时间效费比,2B方案载弹量大,因此回基地补给的次数相对较少,补给花费时间较少,同时其单机单次侦察探测概率更高,虽然探测的范围相对1A较弱,但由于采用了基于DS证据理论融合的协同侦察策略,各无人机之间实现了侦察信息的互通融合,每个无人机都可以获取其他无人机的侦察结果,形成机群系统侦察结果,弥补了侦察范围弱势,同时进一步提高了侦察探测概率,提高了无人机作战闭环的整体成功率,缩短了闭环时间,因此在时间效费比方面2B方案具有优势。最后,对比分析可行潜力与稳定性,基于任务再分配的协同作战策略主要是通过将未完成的目标分配给已经完成自身任务的无人机,其策略本质是将一些完成率与规定阈值相接近的过程优化执行,从而使无人机群能够顺利完成任务,由此减少了执行不成功但完成率与阈值接近的过程,即作战过程仿真结果完成率分布相对更加极端,因此对应地,可行潜力与稳定性会具有劣势。因此,若不考虑最佳方案1B,在小规模-弱对抗的战场态势下,方案2B更适合对时效要求较高的情况,在其他情况下方案1A更优。通过运用本文所提方法,能够在不确定的态势情况下,进行作战过程仿真从而实现对无人机群察打作战效能的有效评估,评估结果符合客观规律,能够为作战决策提供有力支撑。
4.3 结果对比
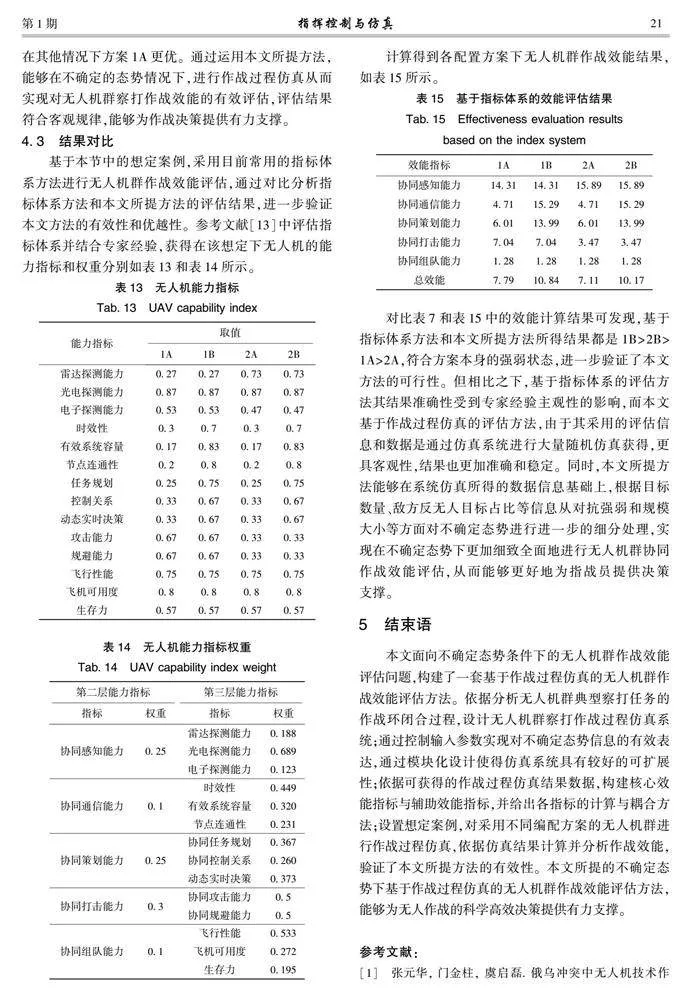
基于本节中的想定案例,采用目前常用的指标体系方法进行无人机群作战效能评估,通过对比分析指标体系方法和本文所提方法的评估结果,进一步验证本文方法的有效性和优越性。参考文献[13]中评估指标体系并结合专家经验,获得在该想定下无人机的能力指标和权重分别如表13和表14所示。
计算得到各配置方案下无人机群作战效能结果,如表15所示。
对比表7和表15中的效能计算结果可发现,基于指标体系方法和本文所提方法所得结果都是1Bgt;2Bgt;1Agt;2A,符合方案本身的强弱状态,进一步验证了本文方法的可行性。但相比之下,基于指标体系的评估方法其结果准确性受到专家经验主观性的影响,而本文基于作战过程仿真的评估方法,由于其采用的评估信息和数据是通过仿真系统进行大量随机仿真获得,更具客观性,结果也更加准确和稳定。同时,本文所提方法能够在系统仿真所得的数据信息基础上,根据目标数量、敌方反无人目标占比等信息从对抗强弱和规模大小等方面对不确定态势进行进一步的细分处理,实现在不确定态势下更加细致全面地进行无人机群协同作战效能评估,从而能够更好地为指战员提供决策支撑。
5 结束语
本文面向不确定态势条件下的无人机群作战效能评估问题,构建了一套基于作战过程仿真的无人机群作战效能评估方法。依据分析无人机群典型察打任务的作战环闭合过程,设计无人机群察打作战过程仿真系统;通过控制输入参数实现对不确定态势信息的有效表达,通过模块化设计使得仿真系统具有较好的可扩展性;依据可获得的作战过程仿真结果数据,构建核心效能指标与辅助效能指标,并给出各指标的计算与耦合方法;设置想定案例,对采用不同编配方案的无人机群进行作战过程仿真,依据仿真结果计算并分析作战效能,验证了本文所提方法的有效性。本文所提的不确定态势下基于作战过程仿真的无人机群作战效能评估方法,能够为无人作战的科学高效决策提供有力支撑。
参考文献:
[1] 张元华, 门金柱, 虞启磊. 俄乌冲突中无人机技术作战使用研究[J]. 科技与创新, 2023(9): 138-140, 143.ZHANG Y H, MEN J Z, YU Q L. "Research on operational use of UAV technology in Russia-Ukraine conflict[J]. Science and Technology & Innovation, 2023(9): 138-140, 143.
[2] 徐同乐, 刘方, 肖玉杰, 等. 国外无人机蜂群作战典型战例及发展趋势[J]. 中国电子科学研究院学报, 2023, 18(10): 946-951.XU T L, LIU F, XIAO Y J, et al. Operational application and technology development of foreign UAV swarm[J]. Journal of China Academy of Electronics and Information Technology, 2023, 18(10): 946-951.
[3] 武晓龙, 吴涛涛, 张震. 高端战争中低成本无人机集群作战研究[J]. 战术导弹技术, 2023(5): 157-163.WU X L, WU T T, ZHANG Z. Research on low cost drone cluster operations in high end warfare[J]. Tactical Missile Technology, 2023(5): 157-163.
[4] 王波, 于升涛, 孙凯华. 舰载无人机对海突击作战效能评估研究[J]. 无人系统技术, 2023, 6(1): 72-81.WANG B, YU S T, SUN K H. Research on the effectiveness evaluation of shipborne UAV in sea assault operations[J]. Unmanned Systems Technology, 2023, 6(1): 72-81.
[5] 丁元明, 龙志勇, 胡瑞祥, 等. 基于模糊层次分析和偏离度的无人机作战效能评估[J]. 火力与指挥控制, 2023, 48(7): 55-65, 73.DING Y M, LONG Z Y, HU R X, et al. UAV combat effectiveness evaluation based on fuzzy analytic hierarchy process and deviation degrees[J]. Fire Control & Command Control, 2023, 48(7): 55-65, 73.
[6] 曹冠平, 甄自清, 李坎. 基于灰色层次分析法的无人机蜂群作战能力评估[J]. 装甲兵学报, 2023, 2(4): 65-69,88.CAO G P, ZHEN Z Q, LI K. Evaluation of drone swarm combat capability based on grey analytic hierarchy process[J]. Journal of Armored Forces, 2023, 2(4): 65-69,88.
[7] 寇昆湖, 刘登攀, 钱峰, 等. 基于改进层次分析法的无人机作战效能评估方法研究[J]. 舰船电子工程, 2023, 43(2): 110-114.KOU K H, LIU D P, QIAN F, et al. Research on operational effectiveness evaluation of UAV based on improved analytic hierarchy process[J]. Ship Electronic Engineering, 2023, 43(2): 110-114.
[8] 邵明军, 刘树光, 严惊涛. 基于ADC-BP模型的对地攻击无人机自主作战效能评估[J]. 空军工程大学学报, 2023, 24(6): 112-119.SHAO M J, LIU S G, YAN J T. Evaluation of autonomous combat effectiveness of ground attack drones based on ADC-BP model[J]. Journal of Air Force Engineering University, 2023, 24(6): 112-119.
[9] 常会振, 秦大国, 孙盛智, 等. 基于ADC模型优化的海上无人机作战效能评估[J]. 兵器装备工程学报, 2023, 44(9): 58-68.CHANG H Z, QIN D G, SUN S Z, et al. Operational effectiveness evaluation of marine unmanned aerial vehicle based on ADC model optimization[J]. Journal of Ordnance Equipment Engineering, 2023, 44(9): 58-68.
[10]陈侠, 胡乃宽. 基于改进型小波神经网络的电子战无人机作战效能评估研究[J]. 电光与控制, 2018, 25(5): 64-67,91.CHEN X, HU N K. Operational effectiveness assessment for electronic warfare UAVs based on improved WNN[J]. Electronics Optics & Control, 2018, 25(5): 64-67,91.
[11]李小娟, 马兴民. 基于混沌遗传-支持向量机的空地攻击型无人机作战效能评估[J]. 数学的实践与认识, 2023, 53(2): 152-158.LI X J, MA X M. Operational effectiveness evaluation of electronic warfare UAV based on chaotic particle swarm optimization and support vector machine[J]. Journal of Mathematics in Practice and Theory, 2023, 53(2): 152-158.
[12]寇昆湖, 刘登攀, 鹿珂珂, 等. 无人机作战效能评估方法研究综述[J]. 兵工自动化, 2022, 41(11): 58-62, 76.KOU K H, LIU D P, LU K K, et al. Review of research on UAV operational effectiveness evaluation method[J]. Ordnance Industry Automation, 2022, 41(11): 58-62, 76.
[13]黄吉传, 周德云. 无人机协同作战效能评估指标体系设计与分析[J]. 西安工业大学学报, 2020, 40(1): 38-44.HUANG J C, ZHOU D Y. Design and analysis of an evaluation index system for UAV cooperative combat effectiveness[J]. Journal of Xian Technological University, 2020, 40(1): 38-44.
(责任编辑:许韦韦)
