基于机载激光雷达的复杂环境空间考古调查方法
2025-02-07田松林秦高敏乔保同王巍先怡衡于春


摘要 机载激光雷达作为一种主动遥感技术,可在复杂环境中有效感知地表或浅地表遗迹信息。然而因成本和技术因素,目前在大规模考古调查中仍不普及。基于棱镜式半固态机载激光雷达技术设计了一套涵盖数据采集、处理和考古分析的一站式激光雷达空间考古调查方法,在满足激光雷达数据精度要求的同时,降低了考古工作者学习和应用的难度,并以南阳地区古代城址调查为例,在各种复杂的遗迹赋存环境中进行了试验。实践表明,该方法能够高效、高质量地完成复杂赋存环境下的考古遗迹信息获取与感知,为考古调查和遗址保护监测等工作提供坚实的数据基础,进而推动机载激光雷达在考古调查中的普及应用。
关键词 机载激光雷达;空间考古;赋存环境;微地貌;数字考古
中图分类号:K854.1" DOI:10.16152/j.cnki.xdxbzr.2025-01-012
Spatial archaeological surface survey method in complex occurrence environment supported by airborne LiDAR
TIAN Songlin1, QIN Gaomin1, QIAO Baotong2, WANG Wei2,XIAN Yiheng1, YU Chun1
(1.School of Cultural Heritage, Northwest University, Xi’an 710127, China;
2.Nanyang Institute for the Preservation of Cultural Heritage, Nanyang 473000, China)
Abstract Airborne LiDAR, as an active remote sensing technology, effectively perceives surface or shallow subsurface relic information in complex environments. However, due to the cost and technical factors, it remains unpopular in large-scale archaeological survey. Based on prism semi-solid airborne LiDAR, we’ve designed a total spatial archaeological survey method encompassing data acquisition, processing, and archaeological analysis. This method not only meets the precision requirements of LiDAR data, but also reduces the learning and application difficulty for archaeologists. Taking the ancient city site survey in" Nanyang as an example, we tested this method across various cultural heritage occurrence environments, including vegetated areas, urban landscapes, and micro-topographical scenes. The results indicate that this method efficiently and effectively acquires and senses archaeological relic information in complex environments, providing a solid data foundation for archaeological surveys, site protection monitoring, and related endeavors. Consequently, this method advances the widespread application of airborne LiDAR in spatial archaeological surface survey.
Keywords Airborne LiDAR; space archaeology; occurrence environment; micro-topography; digital archaeology
三维数字化技术随着科技发展已成为考古调查和发掘的重要方法之一[1]。机载激光雷达因其主动遥感的技术原理,可以获取更丰富和精细的地面信息,在聚落考古调查与文物保护监测等领域发挥重要作用。考古人员通过激光雷达获取点云,并借助一系列可视化工具得到遗址的数字高程模型(digital elevation model, DEM)和数字特征模型(digital feature model, DFM),结合考古学理论对这些数据进行分析和解释,可深入开展聚落考古研究,拓展考古学研究的视野[2]。同时更精细的空间数据也为保护监测古代城址等不可移动文物提供了基础和依据[3]。
近年来,棱镜式半固态激光雷达在自动驾驶的发展下方兴未艾[4]。相较于机械式线扫描激光雷达,棱镜式半固态激光雷达结构紧凑、扫描模式多样且高度集成,可在多种复杂工况中稳定获取高精度数据。然而此方案在考古领域的应用相对较少,业界对其在复杂环境考古调查中获取遗迹数据的有效性、质量和效率方面尚不明确。研究基于机载棱镜式半固态激光雷达系统,在河南南阳对9个有着不同赋存环境的古代城址进行激光雷达扫描和可视化分析,旨在设计一套包含数据采集、处理、空间信息可视化与考古分析的一站式空间考古调查方法。该方法能在复杂的考古调查场景中更好地感知和识别古代城址结构,而且在低成本和便捷作业的前提下,可有效满足大规模、精细化的空间考古调查与数字化文物保护与监测需求。
1 南阳古代城址及赋存环境特征
南阳盆地地处河南省西南部,北抵伏牛山,西靠秦岭与大巴山,东为桐柏山。盆地内水系发达,自然条件优越,人文资源丰富,自古以来便是沟通南北交通的枢纽,也因此孕育了众多的古代城址,其赋存环境[5]也存在差异。受多因素影响,南阳古代城址景观变迁巨大:有些被植被覆盖,有些因土地平整导致残存遗迹被破坏,仅剩下微小的痕迹;更有一些城址与现代城市重合或者被包围。复杂的赋存环境,直接影响研究者对古代城址空间信息的获取与感知。传统的考古调查方法,如航空摄影[6]、全站仪测量[7]等工作在面对复杂的遗址赋存环境时,存在无法获取有效信息、工作效率低等问题。因此,激光雷达方案的出现,为解决类似问题带来了新的可能。
为配合南阳古代城址考古调查工作,对9个具有代表性的古代城址进行了激光雷达扫描作业。9个城址分布在南阳各地(见图1),赋存环境各不相同,主要包括植被覆盖场景、城市场景和微地貌场景3种类型,基本涵盖了城址考古调查中面临的场景,可有效验证棱镜式半固态激光雷达在不同环境下是否具备有效、高效获取考古空间信息的能力。
1.1 植被覆盖场景
古代城址受环境、社会等因素的影响,并非永续使用。一些古城被废弃后,容易引起植被覆盖,一些关键的遗迹,如城墙、城门等地面设施因此受到植被遮挡。南阳市以平原为主,降水丰富,植被相对茂密,相当一部分古代城址被植被覆盖,导致考古调查时难以通过常规手段获取有效信息。9个城址地点中,金汤寨遗址、博望故城和圣井寺古城3处属于该场景类型。
金汤寨遗址位于南阳市方城县金汤寨村(见图1,地点7),遗址核心区三面环水,构成一个相对独立的区域,既往的田野工作和研究表明,该遗址最早可追溯至新石器时代,商时期修筑城墙,城址存续至宋代。该遗址目前地表残存城墙年代最早可追溯到西汉,为夯土结构。古代墙体的上方有大量的植被覆盖,航空和卫星影像仅能通过城外的河流观察城址的大致边界,无法观察墙体结构和城址的详细空间信息。博望故城位于南阳市方城县博望镇(见图1,地点5)。西汉时期张骞被册封“博望侯”于此,行政区划归属南阳郡管辖,之后则长期作为县级地方单位使用。遗址当前环境和金汤寨相似,城墙和城址核心区均存在茂密的植被覆盖现象。圣井寺遗址位于南阳市方城县小史店镇(见图1,地点9)。城址整体年代为隋唐至元代,城址中央还有一座庙宇。相较于金汤寨和博望遗址,圣井寺遗址城墙整体保存较为完好,四面城墙均高于地表,但北部的墙体被大量植被覆盖,同样需要通过激光雷达获取植被下方的城墙结构数据,以便监测墙体当前保存状态,为文物保护提供依据。
1.2 城市场景
古代城市的选址往往是自然和人文条件优越的区域[8],因此很多沿用至今。一些古城的遗迹结构虽然得到保留,却难免被“淹没”在高楼大厦之间。在考古调查中,传统的摄影测量可能因为建筑物过于密集,难以有效测量古城遗迹结构的立体结构,同时因城市环境复杂难以开展贴近摄影测量作业。因此可以借助棱镜式半固态激光雷达在非重复扫描模式下能获取被测对象更多立体结构信息的特点,在建筑物密集的城市场景开展古城的高精度测量工作。激光雷达扫描的9个目标城址中,有3处位于城市中心。
方城遗址(见图1,地点6)位于南阳市方城县城市核心区。方城作为古代城址从汉代沿用至今,目前地表仅存西墙,墙体为夯土结构,带马面。这段墙体所处的位置东西两侧均为密集的现代建筑。阿婆城遗址(见图1,地点1)和靳岗遗址(见图1,地点4)的赋存环境与方城类似,均因城市建设导致古代城墙被现代建筑包围,其中阿婆城遗址仅存的墙体东西两侧距离建筑物不足5 m,且墙体周围还有植被覆盖,环境更加复杂。
1.3 微地貌场景
微地貌是地理学的概念,一般是指起伏微小的地表形态[9]。微地貌虽然特征不明显,但它往往揭示了潜在的地理趋势在地质灾害监测等领域广泛应用[10]。古代城址在长时间保存中难免会因各种原因被破坏。一些城址的墙体或建筑可能较为坚固,不一定完全被损毁,留下了细微痕迹。这些痕迹通常表现为微小的地形起伏,即“微地貌特征”。古代城址的微地形特征一方面起伏较小,特征不明显;另一方面由于农作物等低矮植被的遮挡,肉眼或者摄影测量更是难以察觉。在此研究中,同样有3处城址的主要结构表现为微地貌特征,分别是梁城遗址(见图1,地点8)、棘阳城遗址(见图1,地点3)和光武遗址(见图1,地点9)。其中梁城遗址(南阳市方城县)和棘阳城遗址(南阳市新野县)情况类似,两处遗址的核心范围为农田景观,墙体也位于农田中,地表观察基本无法判断是否具有墙体残留特征;而光武遗址通过航空摄影可大致观察残存的古城墙,但因墙体保存情况较差,仍然需要经过微地貌可视化处理才能更清晰显示目前墙体的保存状况和城址的空间特征。
2 机载激光雷达空间考古方法
2.1 机载棱镜式激光雷达技术
考古调查中常用的激光雷达包含地面式和机载式两大类[11]。地面式激光雷达主要通过车载、固定站等形式实现对目标物体的扫描,获取地面及周边一定高度内遗迹的高精度三维结构数据,可用于考古现场遗迹和遗物建模。但扫描面积小且视角较窄、架站难度大、数据高精度定位复杂等都是掣肘其进一步应用的因素。机载式激光雷达则是搭载于各类航空器平台执行扫描任务。早期机载激光雷达体积庞大,需要有人机作为飞行平台完成工作,操作复杂且成本高昂。近年来随着小型无人机和棱镜式半固态激光雷达技术的成熟,无人机载激光雷达为考古调查中应用此项技术提供了可行性方案[12]。相较于地面激光雷达,机载激光雷达扫描视角更大,可快速获取大范围遗址及其周邻赋存环境的高精度地貌模型,配合微地貌可视化、点云语义分割[13]和分类等分析方法,可有效感知遗址整体空间特征及其与赋存环境之间的关系,尤其是可有效获取植被下方的遗迹信息,为复杂环境下的考古调查提供更翔实、高精度的基础数据。
棱镜式激光雷达是一种通过内置旋转棱镜实现多角度激光扫描的半固态激光雷达解决方案[14]。紧凑的结构使其在无人机平台上得到了广泛地应用。与传统的机械式LiDAR相比,操作简单,维护成本低。同时在扫描精度上可以达到64线激光雷达的效果。此外,棱镜式半固态激光雷达支持非重复扫描模式,可获取更多的立面信息,方便获取遗迹的侧面视图。研究采用大疆M300RTK无人机挂载大疆Zenmuse L2机载激光雷达进行扫描。L2装备了LIVOX棱镜式半固态激光雷达模块,每秒可发射24万个激光点,接收5个回波。在机载RTK固定解模式下,L2获取的点云数据平面精度达5 cm,高程精度约3 cm,可在旁向重叠率仅25%时获取高精度地形数据。不仅如此,L2具有三轴云台,可以有效抵消无人机飞行产生的振动且支持墙面等垂直面场景的扫描,更加稳定地获取高精度、多视角数据。此外,L2支持后差分定位(post processing kinematic, PPK)功能,在无4G网络覆盖的区域,可通过后处理匹配云基站获取高精度差分定位[15],进一步拓宽了高精度激光雷达的作业场景。
2.2 点云数据采集和处理方法
为确保数据精度,外业工作均采用航线模式。首先在地面站上设置飞行区域,此区域以遗址区为核心,向东西南北4个方向外扩100~150 m规划一个矩形,确保激光雷达有效扫描面积大于遗址核心区,一方面是保证遗址边缘的扫描精度;另一方面也同步采集遗址周边景观的地形数据,反映遗址赋存环境特征。为保证数据分辨率一致性,9个城址的激光雷达数据采集参数设置为5回波模式,航高125~130 m,航速9~10 m/s,激光扫描旁向重叠率25%。在此参数下,点云密度控制在约247~250 pts/m2区间内,经地面点分类后得到的地面点云密度约为190~205 pts/m2,可满足制作分辨率为0.07 m的数字高程模型和数字特征模型[16]。
数据处理方面,L2采集的点云原始文件包含点云机内直出文件(LDR格式)、惯导数据、RTK数据和用于着色的照片,需经大疆智图软件的激光雷达点云模块完成数据的预处理,获得LAS格式的完整点云数据。预处理的核心为点云平滑和点云精度优化。其中点云平滑基于点云去噪算法[17],去除因环境干扰等因素采集的离散噪声点,降低点云厚度,进而清晰呈现局部特征,提升点云质量;点云精度优化主要利用航带平差[18]等方法,对多个架次和不同时段作业得到的点云数据进行优化,提升点云数据的一致性。这两种预处理方法进一步提高了L2原始点云数据精度,可满足后续点云分类、遗迹微观地貌单元可视化等空间考古分析。
大疆智图的点云预处理逻辑包含点云密度、点云处理和高级设置3个流程:点云密度主要是设置处理时的点云密度模式,可选择百分比模式或距离模式。在考古调查中,一般选用百分比模式并设为100%,后处理时所有的点云均参与计算,数据精度最高;点云处理模块则包括精度优化、点云平滑、地面点分类以及DEM和DFM制作。这里推荐开启精度优化和点云平滑,软件会对L2点云数据进行航带平差和去噪,让点云厚度更薄且拼接误差更小。
地面点分类方面,大疆智图预设了平地、缓坡和陡坡3种场景的地形场景,根据实际作业环境选择合适的地面点分类场景以达到良好的地面点分类效果[19]。调查中扫描的所有的城址均采用“缓坡”场景执行地面点计算,仅需将“最大建筑物对角线长度”按实际情况修改即可。DEM与DFM生成也较为简单,可直接设置分辨率或比例尺,本次研究中9个城址的DEM和DFM分辨率设置均为0.07 m,方便快捷处理的同时也具备较高的分辨率,可进行有效的遗迹细节特征判读。最后一步则是高级设置,这一块主要选择合适的大地坐标与投影坐标,以及选择是否需要合并多架次采集的点云。参考系设置按统一设置进行即可(WGS84/UTM49N),默认勾选点云合并选项以便生成完整的DEM。完成上述设置后,点击“开始重建”,大疆智图即可自动完成上述工作流,并输出可供第三方地理信息系统读取和分析的LAS点云和TIFF格式的DEM。需要注意的是,部分遗迹在点云分类时有可能被归入“未分类点”而不参与生成DEM,导致最终图像信息不完整,因此需要人工将其归入“地面点”后才能生成反映遗迹地貌信息的DEM,进而制作专门表现城址遗迹的DFM。
2.3 点云数据可视化与考古分析
在提取点云的有效考古信息中,空间可视化方法[20]至关重要。山体阴影和晕渲地貌是点云数据可视化的两种常见的技术方案。将采集的点云进行地面点分类和提取,再使用地面点数据集构建数字高程模型,插值方法为不规则三角网格[21],由此得到过滤了植被、地表人工建筑、车辆等信息的数字高程模型,经过山体阴影的方式,将古代城址遗迹结构清晰地还原出来并进行注记和解释,制成一张反映微地貌遗迹特征的DFM[22]。面对微地貌场景,可增强山体阴影参数设置中的Z因子倍数(通常是5倍)实现更加清晰的可视化结果。另外,DEM/DFM可在三维地理信息场景中基于三维地形生成2.5维模型,即一种固定三维模型某个观察方位输出的图像[23]。相较于真三维模型(如Mesh等),2.5维模型能反映遗址及其赋存环境地貌三维特征的同时支持探索性3D分析中的高程剖面分析,获取古代城址重要遗迹结构的剖面信息,并与平面结构相结合,更全面地完成古代城址的空间感知与分析研究[24],并且便于演示和出版。不仅如此,2.5维图的计算和生产所需的算力远小于真三维模型,可进一步降低数据可视化的算力门槛。
考古分析方面,可根据数字特征模型所显示的基础上,运用地理信息标注工具,对疑似遗迹的位置进行标记。一般城址可使用点要素标记城址中心点以及城内重要设施的位置、线要素标记墙体、面要素标记建筑区域和城内功能分区,甚至在进阶的三维地形分析中调用多面体要素进一步标记甚至重建古城内部的地面要素,如建筑、墙壁等[25]。完成标注后,即可结合地形分析工具和要素分析工具,对城址内部结构、城址与周边赋存环境进行量测、空间关系分析等研究。在此基础上可对目标城址的遗迹赋存环境情况、遗迹保存现状进行评估,同时确定引起地貌异常的区域,为后续的考古勘探、发掘等精细化研究工作提供准确、完善的前置信息,同时也能在一定程度上引导发掘方案,提升古代城址考古勘探和发掘的精细化程度[26]。
总之,基于机载激光雷达的空间考古方法可划分为前置工作、数据采集和处理、空间信息可视化、考古分析解译及实地验证5个环节:①前置工作的主要是适应无人机新规中关于空域申报的要求,结合遗址具体情况制定专业合法的工作计划[27];②数据采集和数据处理着眼于古代城址激光雷达数据的制作,目的在于得到可供主流地理信息系统所识别、感知和分析的通用数据;③空间可视化则是将离散点云数据转化为以栅格数据为代表的通用地理图资,如数字特征模型、数字高程模型,以便开展计算量更小,更便捷的栅格分析与计算;④考古分析和解译则注重激光雷达调查的考古导向,将考古学的理论和遗迹判断的方法应用于数据解译和分析,进而得出符合考古学和文物保护监测需要的相关信息;⑤验证与复查则是依据解译的空间信息,积极开展实地复查、验证,根据结果进一步优化可视化方案。通过要素标记、多源遥感数据对比、栅格和矢量叠加显示等方法,着重表现已确定的遗迹区域,进而更高效地掌握大遗址的各类信息,有条不紊地开展考古研究和文物保护工作。
3 数据成果与分析
通过上述方法完成了9个古代城址的激光雷达扫描工作,得到了对应的数字特征模型。从数据质量看,9座城址的点云数据质量基本一致。点密度为125~133 pts/m2,生成数字特征模型的分辨率为0.07 m,满足考古调查数据基本要求的同时保留更多遗迹细节。下面对棱镜式半固态激光雷达在3种常见的遗迹赋存环境下获取和解析遗迹形态的有效性进行讨论。
3.1 植被覆盖场景
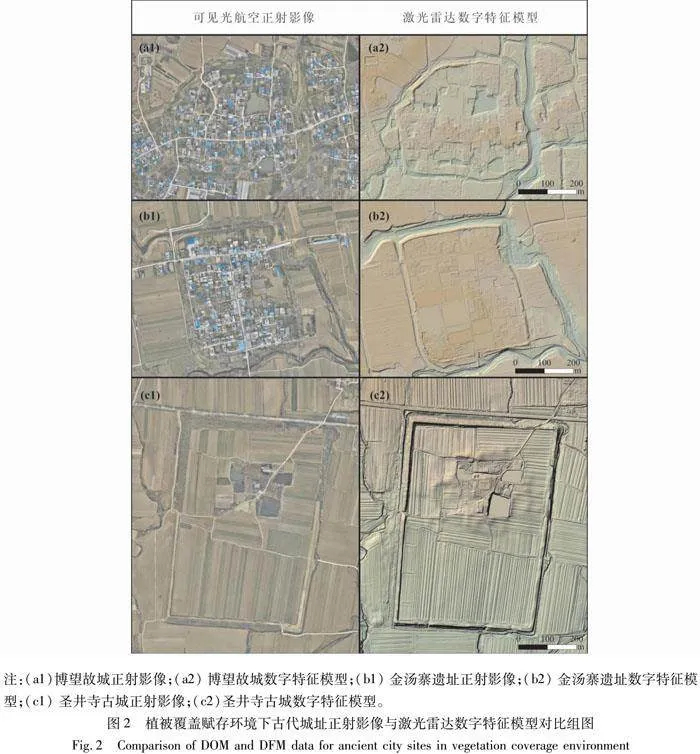
根据实际情况,L2在植被覆盖的场景下能有效获取地面信息,采集古城墙体的结构数据(见图2)。经过植被滤波后的数字特征模型显示了博望故城西北侧的墙体结构相对完好,但东部和南部基本不见城墙的结构特征〔见图2(a1)、(a2)〕,仅能通过故城四周的河道大致判断当时城址的最大范围;金汤寨的城墙虽然大部分被村庄周边的树木覆盖,但四周保存相对完好,可以准确识别出城址的范围〔见图2(b1)、(b2))〕,一些被茂密植被覆盖的墙体在激光雷达的支持下也能被完整记录,并经现场复查确认夯土城墙的存在;而在其东北角因河流侵蚀与现代建设,有部分墙体损毁。一些保存完好的古城,如本次调查的圣井寺古城,墙体上方有部分植被覆盖影响了整体城墙的结构记录,借助激光雷达的穿透性特征即可实现完整记录〔见图2(c1)、(c2)〕,无需人工地面全站仪打点测量林下遗迹高程,极大提升了城址考古调查的效率。
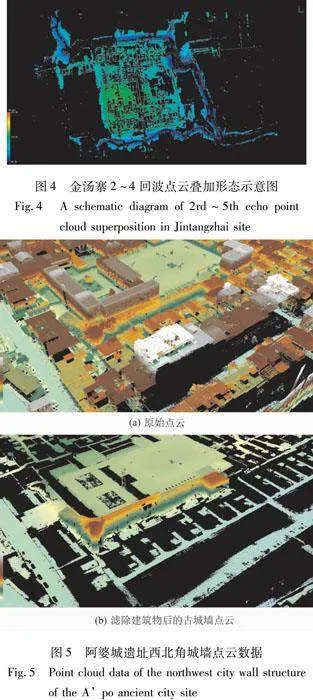
由于L2具有多回波特性,可接收最高5次回波。有效信息集中在哪几次回波,是判断棱镜式半固态激光雷达在林下场景获取考古信息能力的重要参考。以金汤寨城址整体点云〔见图3(a)〕为例:首次回波〔见图3(b)〕点云总数最多,但大部分点为植被最顶部的冠层表面和一些无植被覆盖遗迹结构,林下墙体信息较少;第2〔见图3(c)〕和第3次回波〔见图3(d)〕主要采集树木中间的冠层和部分地面信息,有部分墙体因上方植被相对稀疏,在2、3回波的点云中也包含它们的信息;第4次回波〔见图3(e)〕基本上为地面点,记录了大部分植被下方墙体信息。第5次回波〔见图3(f)〕点云总数最少,单纯依靠第5回波的信息无法建立有效的数字特征模型。综合博望故城和圣井寺遗址的情况,L2在植被茂密的考古遗迹赋存环境下,遗址主体空间信息集中在1~2回波。而林下遗迹信息大部分包含在3~4回波中(见图4),第5回波虽然点数较少,但在高密度植被场景中可以进一步感知林下信息,提升林下地面点数量,进而生成更高分辨率的DFM。表明5回波模式下可满足大部分植被覆盖场景下的考古遗址信息获取和处理。
3.2 城市场景
城市场景在古代城址考古调查中较为常见。一般情况下城市场景中古代城址有两种赋存情况。一种是古代城址的大部分结构位于现代都会区地下;另一种则是古城的一些重要的结构, 如城墙、 马面、敌楼,因城市建设发展被现代建筑包围。 棱镜式半固态雷达无法获取第1种情况下的遗迹信息, 而对于第2种, 则可以发挥非重复扫描的特征优势,配合点云分类实现遗迹的准确提取和标记。 对阿婆城、 靳岗遗址和方城遗址3处古代城址进行扫描, 3处城址虽然均位于市区, 但具体情况有所差异。 阿婆城遗址残存墙体和马面位于城址核心区的西北角, 其残存墙体四周不到2 m的范围内有着密集的建筑物〔见图5(a)〕,对墙体的侧面形成遮挡。使用L2的非重复扫描模式,获取了阿婆城西北角城墙和马面的点云,并通过大疆智图滤波后,点云数据清晰地展现了阿婆城西北侧城墙和马面结构〔见图5(b)〕。
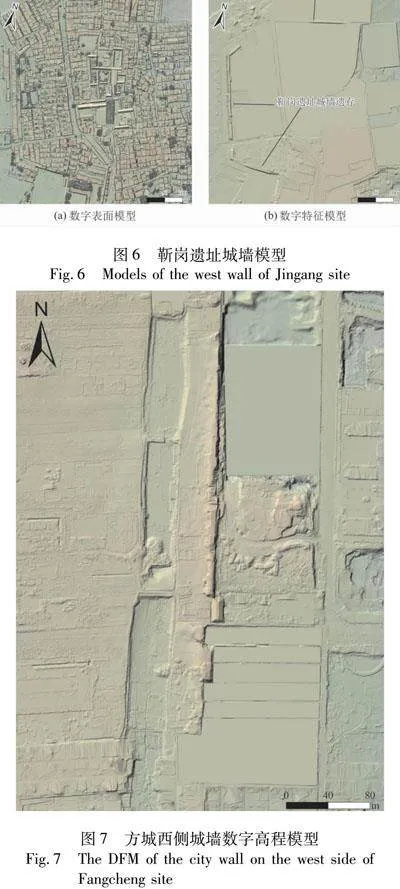
靳岗遗址的情况与阿婆城类似,残存墙体分布在城址核心区西侧,墙体东西两侧均为密集的居民区。数字表面模型因为同时显示了古城墙、现代街道和建筑物等多种地物信息〔见图6(a)〕而难以突出重点;而基于激光雷达扫描和点云分类提取后生成的DFM〔见图6(b)〕则清晰地展示了靳岗遗址目前地表保存的古代城墙及其拐角的空间特征。最后,方城遗址的情况(见图7)在过滤现代建筑物后也能清晰显示残存的西墙及其马面。
3.3 微地貌场景
微地貌对考古调查而言是发现潜在遗迹的线索之一,但它在观测和识别上具有相当的难度。由遗迹引起的微地貌特征,其形成原因有两点:一是遗迹结构埋藏深度较浅,仅顶部部分出露地表;另一点则是遗迹结构大部分遭到破坏,仅剩下细微的痕迹。在研究案例中,光武遗址属于第1种情况;而梁城遗址和棘阳城遗址结合现场踏查看,属于第2种情况。
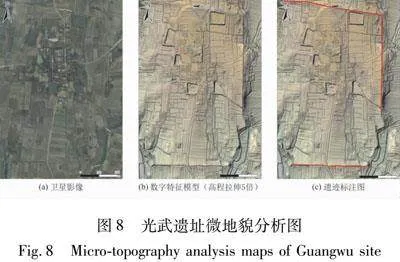
光武遗址城墙保存情况较好,地表可依稀观察古城墙的夯土结构〔见图8(a)〕,但墙基埋在地下,地表露头不明显。激光雷达扫描的DFM〔见图8(b)〕可以观察到北、东、南3个方向有类似城墙的结构,可视化效果也不理想。采用山体阴影配合高程增强显示后,得到了图8(c)的结果。该图清晰显示了光武古城的北墙、东墙和南墙保存完好且墙体基本闭合,仅西墙和东墙南段有缺失。根据DFM可视化结果,可以复原光武古城的城墙构造,并大致推算其城内面积。
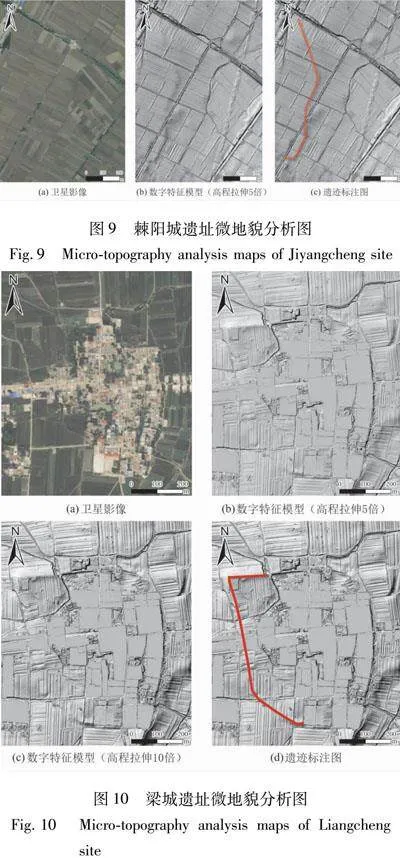
相较于光武遗址,棘阳城遗址和梁城遗址的情况更为特殊。受机械化农耕影响,城址结构破坏较为严重。传统踏查难以发现墙体的位置、结构等空间信息,因此采用山体阴影增强可视化方法对城墙可能分布的区域进行了解析制图可有效感知残存的遗迹特征。首先是棘阳城,文献记载中表明西汉时期棘阳城设立于此,考古踏查也能发现大量的汉代砖瓦、陶片等遗物,但地表不见任何城墙结构〔见图9(a)〕。使用L2对这一区域扫描后,经计算机后处理过滤了地表低矮植被(农作物)并使用山体阴影配合Z因子倍增对原始高程数据进行增强〔见图9(b)〕,显示了一处疑似墙体的微地貌特征〔见图9(c)〕。从走向看,该结构有可能是此前第二次文物普查时所记载的棘阳城残存城墙。梁城的情况与之类似,从卫星影像上可观察梁城遗址仅西北角有一处残存的古城墙结构〔见图10(a)〕,而经过HSD增强5倍高程显示时〔见图10(b)〕,可观察到疑似为西墙的微地貌结构顺着梁城城墙西北角向南延伸,然后向东拐,而在山体阴影模式中 Z因子增强10倍后,此现象更为明显〔见图10(c)〕。根据微地貌数据结果考古专家可对疑似墙体进行标注〔见图10(d)〕,引导后续实地勘探和踏查。
需注意,并非所有的微地貌特征都是因遗迹埋藏产生。因此对激光雷达数据反映的微地貌特征还需要结合实地踏查、考古研究和遗迹形态理论框架,经人工解译才能得到相对可信的解释。
3.4 小结
以L2为代表的棱镜式半固态激光雷达性能良好,操作简便,面对植被场景,它可接收5次回波信号,有效克服植被遮挡获取遗迹信息。在城市场景中,可使用非重复扫描模式向更多方向发射激光束,进而在高楼间隙中更有效获取遗迹的立面结构,配合点云分类可更直观地制作考古遗迹专题图。而面对因遭受破坏或浅埋藏引起的遗迹微地貌特征,棱镜式半固态激光雷达也可以有效捕捉微小的地形结构,经增强可视化计算后即可重建考古遗迹空间特征。上述场景基本涵盖了大部分考古调查中面临的遗迹赋存环境,而本研究的实践证明这种低成本的机载激光雷达方法应用于大规模、日常化的考古调查工作以及周期性的不可移动文物点保护监测具有现实意义。
需注意,激光雷达在聚落考古调查中的优势建立在遗址地表存在相关遗迹现象或微观地貌特征之上,对于深埋地下的遗迹现象仍然无法有效感知,也无法作为判断遗迹的年代属性的依据。因此,需要结合地面踏查和遗物采集,空地信息协同才能高效且准确地把握遗址内涵,准确、深入地认识文化遗产。
4 结语
早在30年前激光雷达就已引入考古学领域,成为继航空可见光遥感后又一场革命[28]。在探索前沿的同时,更应关注如何将激光雷达方案广泛应用于空间考古调查和文化遗产监测保护工作[29]。南阳古代城址调查的实践证明了棱镜式半固态激光雷达空间考古调查方法的潜力。面对植被遮挡、城市以及微地貌等多种赋存环境,棱镜式半固态激光雷达都能有效获取考古遗迹信息,基于点云数据生成的DFM清晰显示了目标城址遗迹的细致结构,让那些沉寂在荒烟蔓草中的古代城址重出天日,唤醒大众对文化遗产的共同记忆。不仅如此,该方法将进一步降低激光雷达考古调查的技术准入门槛,让更多非测绘专业出身的考古人员能够快速应用,同时也能进一步提升考古调查数据获取和解析能力,为正在开展的第四次全国文物普查工作提供更为坚实的技术保障。
除了制作反映裸土地表信息的高精度DEM/DFM外,激光雷达点云还可与机器学习、图像识别等人工智能结合,构建考古遗迹识别模型,进而实现对同一类遗迹的自动识别,并由此探讨遗迹空间结构特征的量化表达方法[30],从而探讨其中的文化因素、思考文明的产生和发展,让激光雷达数据不仅作为考古成果展示载体,更成为空间考古研究和深度数字化分析的重要材料。事实证明,棱镜式半固态激光雷达技术在现代考古调查、研究与城址类文化遗产保护中具有广阔的应用前景,对其研究和实践应该持续不断深入推进,并探索激光雷达技术与考古学的融合,以推动多源遥感空间考古不断发展。
参考文献
[1] 黄晓娟,严静,范娟娟,等.陕西周原贺家遗址出土车马器工艺调查及数字化复原[J].西北大学学报(自然科学版),2021,51(5):797-806.
HUANG X J, YAN J, FAN J J, et al.Technical investigation and digital restoration of chariot in the Western Zhou Dynasty unearthed at the Hejia site in Zhouyuan, Shaanxi[J].Journal of Northwest University (Natural Science Edition),2021,51(5):797-806.
[2] RENFREW C, BAHN P.Archaeology: Theories, methods, and practice[M].London: Thames amp; Hudson, 2020:86-88.
[3] 文化部文化资产局.文化资产场域3D雷射扫描记录[M].台北:台北科技大学防灾工程科技中心, 2020:10-14.
[4] 曾昊旻,李松,张智宇,等.车载激光雷达Risley棱镜光束扫描系统[J].光学精密工程,2019,27(7):1444-1450.
ZENG H M,LI S,ZHANG Z Y,et al. Risley-prism-based beam scanning system for mobile lidar[J].Optics and precision Engineering,2019,27(7):1444-1450.
[5] 王心源,郭华东.空间考古学:对象、性质、方法及任务[J].中国科学院院刊,2015,30(3):360-367.
Wang X Y,GUO H D.Space archaeology: Disciplinary attribute, research object, method and tasks[J].Bulletin of the Chinese Academy of Sciences,2015,30(3):360-367.
[6] 李松阳,王藏博,徐怡涛.以小型低成本无人机进行大型考古遗址航测的新探索:以赤峰辽中京遗址为例[J].遗产与保护研究,2018,3(11):124-132.
LI S Y, WANG C B, XU Y T.A new exploration of aerial photogrammetry in large archaeological sites with small and low-cost unmanned aircraft: Taking the Liaozhongjing Site in Chifeng as an example[J].Research on Heritages and Preservation,2018,3(11):124-132.
[7] 秦岭,张海.电子全站仪在田野考古中的应用[J].考古,2006(6):73-78.
QIN L, ZHANG H.The Application of Electronic Total Stations in Field Archaeology[J].Archaeology,2006(6):73-78.
[8] 任冠,魏坚.城市考古研究中空间分析的理论与实践:基于遥感与地理信息系统[J].河南大学学报(社会科学版),2021, 61(1): 77-82.
REN G, WEI J.Theory and practice of spatial analysis in urban archaeology research: Based on remote sensing and geographical information on system[J].Journal of Henan University(Social Sciences),2021, 61(1): 77-82.
[9] 黄德华:福建山区机载LiDAR微地貌识别最优点密度研究[J].测绘与空间地理信息,2023,46(10):132-136.
HUANG D H. Study on the optimal density of airborne LiDAR micro landform recognition in mountainous areas of Fujian Province[J].Geomatics amp; Spatial Inofrmation Technology,2023,46(10):132-136.
[10]赵晓东,杨华,王曦阅.三维点云数据微地形特征量的提取及应用研究[J].测绘科学,2024,49(5):133-142.
ZHAO X D, YANG H, WANG X Y.Study on extraction of micro-terrain features from 3D point clouds and its application[J].Science of Surveying and Mapping,2024,49(5):133-142.
[11]王成,习晓环,杨学博,等.激光雷达导论[M].北京:高等教育出版社,2022:3-5.
[12]PRUFER K M,THOMPSON A E, KENNETT D J.Evaluating airborne LiDAR for detecting settlements and modified landscapes in disturbed tropical environments at Uxbenká, Belize[J].Journal of Archaeological Science,2015(57):1-13.
[13]袁立成,魏振华.三维点云语义分割方法[J].现代电子技术,2024,47(22):51-56.
YUAN L C, WEI Z H.Method of three-dimensional point cloud semantic segmentation[J].Modern Electronics Technique,2024,47(22):51-56.
[14]LI A H, LIU X S, SUN J F, et al.Risley-prism-based multi-beam scanning LiDAR for high-resolution three-dimensional imaging[J].Optics and Lasers in Engineering,2022,150: 106836.
[15]王晶,王朝阳,张峰,等:北斗PPK技术辅助无人机航空摄影测量精度分析[J].测绘通报,2022,(12):64-69.
WANG J, WANG C Y, ZHANG F, et al. Precision analysis of aerial photogrammetry assisted by Beidou PPK technology[J].Bulletin of Surveying and Mapping,2022,(12):64-69.
[16]FRACHETTI M D, BERNER J, LIU X Y, et al. Large-scale medieval urbanism traced by" UAV-iDAR in highland Central Asia[J].Nature,2024, 634(8036):1118-1124.
[17]刘一萍,周明全,寇姣姣,等.基于无监督网络框架的文物点云模型去噪[J].激光与光电子学进展,2022,59(12):362-371.
LIU Y P, ZHOU M Q, KOU J J, et al. Denoising of cultural relics point cloud model based on unsupervised network framework[J].Laser amp; Optoelectronics Progress,2022,59(12):362-371.
[18]王丽英,宋伟东,孙贵博.机载LiDAR数据航带平差研究进展[J].遥感信息,2012(2):120-128.
WANG L Y, SONG W D, SUN G B.A survey of researches on strip adjustment of Airborne LiDAR data[J].Remote Sensing Information,2012(2):120-128.
[19]黄江雄,曹骞,胡向,等.轻小型机载激光雷达点云处理关键技术[J].测绘通报,2024(5):115-120.
HUANG J X, CAO Q, HU X, et al.Key technologies of Point cloud processing for light and small airborne LiDAR[J].Bulletin of Surveying and Mapping,2024(5):115-120.
[20]朱军,朱庆,艾廷华,等. 空间信息可视化[M].北京:科学出版社,2023:15-17.
[21]徐巍,孙志鹏,徐朋,等.基于LiDAR点云数据插值方法研究[J].工程地球物理学报,2012,9(3):365-370.
XU W, SUN Z P, XU P, et al.Interpolation Method Based on the Point Cloud Data LiDAR[J].Chinese Journal of Engineering Geophysics,2012,9(3):365-370.
[22]TULAR B, EICHERT S, LOZIC E.Airborne LiDAR point cloud processing for archaeology: Pipeline and QGIS toolbox[J].Remote Sensing, 2021, 13(16):3225.
[23]文伯聪,张彤.一种用于导航的2.5维地图的构建[J].计算机工程与科学,2011,33(4):110-114.
WEN B C, ZHANG T. A 2.5dimension map building for navigation[J].Computer Engineering amp; Science,2011,33(4):110-114.
[24]张海.GIS与考古学空间分析[M].北京:北京大学出版社,2014:272-275.
[25]DELL’UNTO N, LANDESCHI G.Archaeological 3D GIS[M].London: Routledge, 2022:72-74.
[26]任冠,魏坚.遥感与地理信息系统在城市考古中的实践[J].江汉考古,2020(4):102-111.
REN G, WEI J. Application of remote sensing and geographical information system to urban archaeology[J].Jianghan Archaeology,2020(4):102-111.
[27]李宇奇,王紫玉.无人机考古调查方法初论[J].华夏考古,2023(3):128-138.
LI Y Q, WANG Z Y.An initial exploration of archaeological survey methods using UAV[J].Huaxia Archaeology,2023(3):128-138.
[28]LUO L, WANG X Y, GUO H D, et al. Airborne and spaceborne remote sensing for archaeological and cultural heritage applications: A review of the century (1907—2017)[J].Remote Sensing of Environment,2019(232):111280.
[29]孙满利,张景科.文物保护学的理论探讨[J].西北大学学报(自然科学版),2022,52(2):192-198.
SUN M L, ZHANG J K.Theoretical discussion on conservation of cultural heritages[J].Journal of Northwest University (Natural Science Edition),2022,52(2):192-198.
[30]WANG S L, HU Q W, WANG S H, et al. Archaeological site segmentation of ancient city walls based on deep learning and LiDAR remote sensing[J].Journal of Cultural Heritage,2024(66):117-131.
(编 辑 邵 煜)
基金项目:国家科技基础资源调查专项(2022FY101503)
第一作者:田松林,男,从事激光雷达遥感考古和数字化考古研究,MU2323XIAN@163.com。
通信作者:于春,女,教授,博士生导师,从事田野考古研究,yuchun@nwu.edu.cn。
