基于邻域点集稠密度的古陶瓷碎片轮廓线提取算法
2025-02-07王莹刘鹏欢陈雅鑫王旭粲李巍周强罗宏杰


摘要 古陶瓷碎片轮廓线特征作为文物数字化修复的主要依据之一,能够直接影响文物原真性复原的质量和效率。针对古陶瓷碎片胎体较薄、形状不规则且点云数据量大而导致轮廓线提取的精度低、耗时长等问题,提出了一种基于邻域点集稠密度的古陶瓷碎片轮廓线提取算法。首先,采用有向包围盒(OBB)中心平面平行切平面方式,将碎片进行切片处理,实现对点云的分层处理和数据简化;其次,根据轮廓点和非轮廓点处邻域点集稠密度不同这个规律,将邻域点集稠密度特征与随机采样一致性(RANSAC)算法相结合,实现对碎片轮廓线的精确和快速提取;最后,构造空间分类平面,并依据空间位置的约束关系,实现对碎片断裂面和非断裂面轮廓线的分类。实验结果表明,在百万级数据规模的古陶瓷碎片轮廓线提取方面,算法运行时间可控制在15~25 s,并且轮廓线提取的准确性可达78.3%,具有较高的准确性和完整性,能够为古陶瓷文物数字化修复提供技术依据。
关键词 古陶瓷碎片轮廓线;点云切片;邻域点集稠密度;随机采样一致性算法
中图分类号:TP391" DOI:10.16152/j.cnki.xdxbzr.2025-01-010
Contour extraction algorithm of ancient ceramic fragmentsbased on the density of neighborhood point set
WANG Ying1,2, LIU Penghuan3, CHEN Yaxin3, WANG Xucan3, LI Wei3, ZHOU Qiang3, LUO Hongjie4
(1.School of Materials Science and Engineering (School of Conservation Science & Technologyfor Cultural Heritage), Shaanxi University of Science & Technology, Xi’an 710021, China;
2.Key Laboratory of Materials & Technology for Underground Cultural Heritage Conservation,Ministry of Education, Shaanxi University of Science & Technology, Xi’an 710021, China;
3.School of Electrical and Control Engineering, Shaanxi University of Science & Technology, Xi’an 710021, China;
4.Key Laboratory of Silicate Cultural Relics Conservation, Ministry of Education, Shanghai University, Shanghai 200444, China)
Abstract The contour features of ancient ceramic fragments can directly affect the quality and efficiency of the restoration of cultural relics. In order to solve the problems of low precision and time-consuming in contour extraction due to the thin body, irregular shape and large amount of point cloud data of ancient ceramic fragments, a contour extraction algorithm of ancient ceramic fragments based on the density of neighborhood point set is proposed. Firstly, the Oriented Bounding Box (OBB) center plane parallel cutting plane is used to slice the fragments for realizing the layered processing and data simplification of the point cloud. Secondly, according to the law that the density of neighborhood points at contour points and non-contour points is different, the density feature of neighborhood point set is combined with the Random Sampling Consensus (RANSAC) algorithm to achieve accurate and fast extraction of fragment contours. Finally, construct the space classification plane and classify the fracture surface and non-fracture surface contours based on spatial positional constraints. The experimental results show that the running time of the algorithm can be controlled within 15~25 seconds, and the accuracy of contour extraction can reach 78.3%, with high accuracy and integrity, which can provide technical basis for digital restoration of ancient ceramic cultural relics.
Keywords contours of ancient ceramic fragments; point cloud slices; the density of neighborhood point set; random sample consensus algorithm
古陶瓷文物是人类文明和世界文化宝库的重要组成部分,其历经万年而不变其性,重现于世又因其脆性而难全其型,尤其是窑址出土的大量残片和遭受盗扰的墓葬,造成了修复工作量大、耗时长、难度高等问题[1]。随着计算机技术的发展,利用数字化手段实现文物碎片的自动拼接和虚拟修复,进而为文物实体修复的“最小干预性”和“可逆性”提供技术支持,已经成为了文物修复领域的研究热点[2]。当前,文物数字化修复根据文物的厚度特征可以分为两大类:一类是针对兵马俑、石碑等非薄壁类文物的修复,主要以其断裂面、轮廓线和表面纹理等特征为依据进行修复[3-4];另一类是针对陶器、瓷器和壁画等薄壁类文物的修复,主要以其轮廓线,特别是断裂面轮廓线作为修复依据[5-6]。因此,文物轮廓线作为数字化修复的主要依据之一,能够直接影响文物原真性复原的质量和效率,尤其对于古陶瓷这类胎体较薄、形状随机且大小不一的陶瓷类文物修复来说,轮廓线显得更为重要。
轮廓线作为物体的几何特征,能直接反映物体的形状和大小。其提取方法主要可分为3类:基于曲面拟合的方法、基于二维图像边缘检测的方法和基于点云特征的方法。
基于曲面拟合的方法是根据三维曲线可视为两个三维平面交线这个原理来获取轮廓线[7]。Moghadam等从点云中通过平面相交来提取三维线段,并与其对应的二维线段相结合来获取轮廓线[8]。曲面拟合法一般适用于数据量少、形状规则或直线段较多的物体中,但由于古陶瓷碎片的点云数据量较大且形状大小不一,导致该方法的曲面拟合难度大,拟合效率与精度都难以满足修复要求。
基于二维图像边缘检测的方法将点云数据投影为二维图像,利用边缘检测算法在图像上提取二维线段,再将其重新投影到三维点云上,得到最终的轮廓线[9-11]。刘建兴等先对已分类的建筑物点云进行栅格化得到二值图,再对二值图进行膨胀和腐蚀操作,最后利用直线段检测算法获取规则的轮廓线[12]。二维图像边缘检测法使用高效且简便,但由于多次投影,导致该方法提取到的轮廓线误差较大。
基于点云特征的方法是通过设计特征分类器, 利用设计好的特征分类器来区分轮廓点和非轮廓点, 进而得到轮廓线[13-16]。 惠振阳等采用随机采样一致性(random sample consensus, RANSAC)算法筛选由Alpha-shapes算法提取的初始轮廓点,再用道格拉斯普克(Douglas-Pucker,DP)算法确定关键轮廓点,最后通过强制正交优化提取准确的轮廓线[17]。李帅等利用法线估计获取候选轮廓点,再通过三维DP算法进行抽稀,然后利用主成分分析选取基面,最后通过点到基面的距离来判断轮廓点[18]。韩玉川等通过计算种子点邻域内点的边缘系数来选择新的种子边缘点,并通过搜索视角来控制点云搜索的方向,最终提取出闭合的点云轮廓[19]。杨振清等将每个截面数据中非连续特征曲线点集分割为若干个连续特征曲线点集,随后利用点云密度作为阈值对不同的连续特征曲线点集进行二次分割,从而获取点云轮廓线[20]。点云特征法在特征分类器设计良好的情况下,轮廓线提取效果好。
因此,针对古陶瓷碎片胎体较薄、形状不规则且点云数据量大而导致的轮廓线提取算法精度低、耗时长等问题,本研究在点云特征法的基础上加以改进,以百万级规模的古陶瓷碎片点云数据作为研究对象,提出了一种基于切片邻域点集稠密度的古陶瓷碎片轮廓线提取算法,旨在精确且快速地实现古陶瓷碎片轮廓线的提取与分类。
1 本研究方法的思路
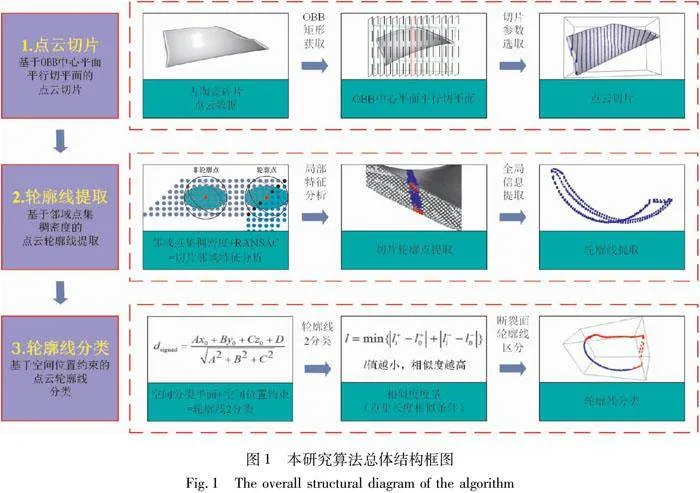
为了实现对古陶瓷碎片轮廓线快速且精确的提取和分类,本研究算法分为点云切片、轮廓线提取和轮廓线分类3个部分,其总体结构框图如图1所示。
1)点云切片。采用基于OBB(Oriented Bounding Box)中心平面平行切平面的方式,将古陶瓷碎片点云进行切片处理,提高后续轮廓线提取的效率。
2)轮廓线提取。根据轮廓点和非轮廓点处的邻域点集稠密度不同这个规律,使用基于邻域点集稠密度的点云轮廓线提取方法,将邻域点集稠密度特征与RANSAC算法相结合,实现对切片轮廓点和非轮廓点的分类和快速提取,进而得到整个古陶瓷碎片的轮廓线。
3)轮廓线分类。通过基于空间位置约束的点云轮廓线分类方法,根据空间位置约束,构造用于区分断裂面轮廓线和非断裂面轮廓线的空间分类平面,计算轮廓点与分类平面的有符号距离,实现对古陶瓷碎片断裂面和非断裂面轮廓线的分类,进而实现对碎片中不同部分之间关系的精确描述,为进一步的数字化修复提供更加准确的数据支撑。
2 古陶瓷碎片轮廓线提取算法
2.1 点云切片
采用基于OBB中心平面平行切平面的方法,通过计算古陶瓷碎片点云的OBB最小外接矩形和中心平面平行切平面,实现对碎片点云的切片处理,有效减少后续轮廓线提取的数据量,进而提高算法的效率。
2.1.1 OBB最小外接矩形
为了获取古陶瓷碎片点云的OBB盒,即OBB最小外接矩形[21],首先,计算碎片点云的协方差矩阵及其协方差矩阵的特征值和特征向量,实现对点云形状特征的提取;其次,选择最小特征值对应的特征向量所在方向作为OBB盒的主轴方向,再计算点云的均值作为矩形的中心;最后,计算矩形的宽度和高度,得到OBB最小外接矩形。
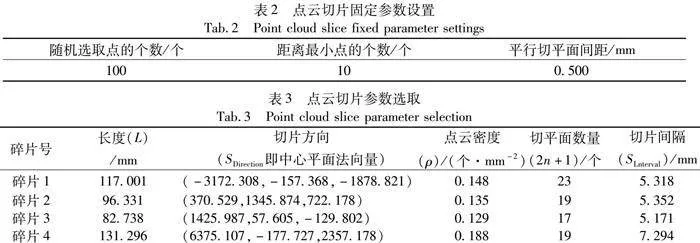
2.1.2 切片参数选取
首先,选取OBB最小外接矩形的长(L)、宽(b)、高(h)3个参数中长的方向作为切片方向SDirection,确保切片方向与碎片点云的主轴方向一致;其次,通过OBB的L来确定切片数量(2n)和切平面数量(2n+1),得到切片间隔即SInterval=L/2n,从而灵活地控制切片的密度和数量。同时,切片间隔(SInterval)、点云密度(ρ)必须满足如下公式,确保切片周围存在点云:
SIntervalgt;ρ。(1)
其中,点云密度ρ的计算方法如下:在原始点云中随机选取nr个点,对每一个点gi(i=0,1,…,nr)在点云内找出与其距离最小的m个点,计算出这些点与点gi的距离Di,对所有Di求平均值得到点云密度ρ。
2.1.3 点云切片
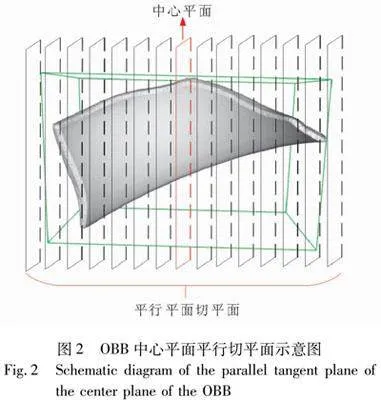
在选取切片参数后,提出一种基于OBB中心平面平行切平面的古陶瓷碎片点云切片算法,实现对整个点云的切片操作[22](见图2)。首先,通过OBB的中心和切片方向SDirection确定中心平面位置,为后续的中心平面平行切平面提供基准平面。其次,利用切平面数量和切片间隔来确定中心平面的平行切平面,实现对碎片点数据云的划分。最后,提取到平行切平面距离小于且等于d的点云作为切片点云,将碎片点云分割为多个切片,从而提高后续轮廓线提取的效率。
2.2 轮廓线提取
采用基于邻域点集稠密度的古陶瓷碎片点云轮廓线提取方法,将邻域点集稠密度特征与RANSAC算法相结合,可以有效且快速地识别出碎片点云的轮廓线,为后续的形状分析和轮廓线分类提供重要依据[23]。
2.2.1 邻域点集稠密度
通过对古陶瓷碎片点云数据进行深入研究和分析,发现其具有以下规律:如图3所示,任意选取古陶瓷碎片点云中某一点作为目标点,并以该点为中心建立半径为r的邻域空间,得到该点的邻域点集,以轮廓点为目标点和以非轮廓点为目标点处的邻域点集稠密度是不同的。若目标点为非轮廓点,则该邻域空间内点云分布较为均匀,该点的邻域点集较为稠密;当使用某一空间平面对该邻域空间内的点进行拟合时,拟合点较多。若目标点为轮廓点,则该邻域空间内点云分布相对不均匀,该点的邻域点集较为稀疏;当使用同一空间平面对该邻域空间内的点进行拟合时,拟合点较少。通过这一规律可以区分出轮廓点和非轮廓点,为后续的轮廓线提取提供了重要的理论依据。
2.2.2 点云轮廓线提取
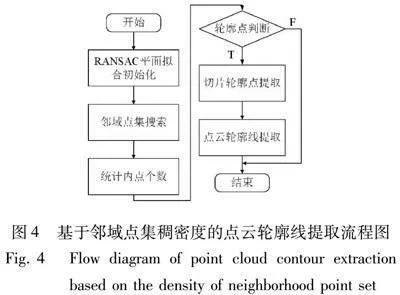
根据上述邻域点集稠密度规律,提出一种基于邻域点集稠密度的古陶瓷碎片点云轮廓线提取算法,将邻域点集稠密度特征和RANSAC算法相结合,实现对点云局部特征的分析和全局形状信息的提取,能够有效地识别出古陶瓷碎片点云中的轮廓线。同时,通过对RANSAC算法的应用,既能保证拟合精度,又能提高算法的鲁棒性和效率。该算法的流程如图4所示。
1)RANSAC平面拟合初始化:设定距离阈值DThreshold,最小采样集大小nRANSAC。
2)邻域点集搜索:对切片内的任一目标点执行k近邻搜索,将邻域半径r内的所有点作为邻域点集G,且邻域点集个数LGgt;3。
3)RANSAC平面拟合:对邻域点集G进行RANSAC平面拟合,识别出切片内的空间平面结构。
4)统计内点个数:计算拟合平面内点的个数,即内点个数LRANSAC。
5)轮廓点判断:设定百分比阈值PThreshold,通过判断内点个数是否满足预设的百分比阈值PThreshold来确定切片的轮廓点,其公式为:
f(LRANSAC)=" True,LRANSAClt;PThreshold×LGFalse,LRANSACgt;=PThreshold×LG (2)
式中:f(LRANSAC)表示目标点是否为轮廓点,若f(LRANSAC)为True,则目标点为轮廓点;若f(LRANSAC)为False,则目标点为非轮廓点。
若内点个数小于阈值,则认为该点为轮廓点;否则认为该点为非轮廓点。
6)切片轮廓点提取:遍历整个切片点云,重复上述步骤,得到切片的轮廓点。
7)点云轮廓线提取:提取所有切片的点云轮廓点,得到碎片点云的轮廓线。
2.3 轮廓线分类
提出一种基于空间位置约束的古陶瓷碎片点云轮廓线分类方法,通过获取轮廓点到空间平面的有符号距离[24],能够有效且快速地实现对断裂面轮廓线和非断裂面轮廓线的准确分类[25]。同时,可以利用不同类别轮廓线进行古陶瓷文物的拼接修复,既可以减少特征匹配的数据量,又能增加修复的约束条件,从而提高修复效率和精度。
2.3.1 空间分类平面构造
为了实现轮廓线的分类,需要获取用于区分断裂面轮廓线和非断裂面轮廓线的空间分类平面。首先,获取OOB盒的8个顶点、8个中点和碎片到OBB盒6个平面的最邻近点。其次,采用3个点确定一个平面的方法构造空间平面。最后,通过去掉3个点全属于顶点或中点的情况进行筛选,去除错误的分类平面,进而得到可能的空间分类平面。
2.3.2 空间位置约束
采用点到平面的有符号距离来作为空间位置约束,即轮廓点相对于空间分类平面的距离,该距离具有方向性,可以是正值、负值或零,取决于点相对于平面的位置。
设某一轮廓点为P0(x0,y0,z0),空间分类平面Π方程为:Ax+By+Cz+D=0,则点P0到平面Π的有符号距离公式为
dSigned=Ax0+By0+Cz0+D[]A2+B2+C2(3)
由于轮廓线分类结果只与dSigned的正负有关,因此,为提高计算机运算效率,将公式(3)简化为
dSigned=Ax0+By0+Cz0+D(4)
式中,dSigned为轮廓点P0到空间分类平面Π的有符号距离。若dSigned为正值,则表示点在平面的上方;若dSigned为负值,则表示点在平面的下方;若dSigned为零,则表示点在平面上。
2.3.3 点云轮廓线分类
在2.3.1和2.3.2小节的基础上,提出一种基于空间位置约束的古陶瓷碎片点云轮廓线分类算法:首先,根据顶点、中点和最邻近点构造多个空间分类平面;其次,对于2.2节提取到的点云轮廓线,根据空间位置约束关系,实现轮廓线的2分类;最后,采用点集长度相似度条件,通过对2分类轮廓线的数据量大小进行度量,实现对断裂面和非断裂面轮廓线的分类。该算法的实现步骤如下。
1)可能的空间分类平面构造。任意选取顶点、中点和最邻近点中的3个点,并除去全属于顶点或中点的情况,通过3点确定平面法构造可能的空间分类平面。
2)轮廓线2分类。对于每个可能的空间分类平面,遍历整个点云轮廓线,计算每个点Pi到空间分类平面的有符号距离,形成有符号距离集合GSigned。对于每一个有符号距离集合,从有符号距离集合GSigned中选取所有有符号距离大于且等于零的点,组成正类轮廓线集合G+Signed;选取所有有符号距离小于且等于零的点,组成负类轮廓线G-Signed。
3)相似度度量。根据使用Cloud Compare软件标注好的断裂面和非断裂面轮廓线,采用如下公式所示的点集长度相似度条件,对多组正类轮廓线集合和负类轮廓线集合进行度量,最终选取相似度最高的2分类轮廓线作为断裂面和非断裂面轮廓线。
l=min{|l+i-l+0 |+|l-i-l-0 |}(5)
式中:i表示正反组,取1或0;当i=1时,表示正组,即l+i为正类轮廓线集合长度且l-i为负类轮廓线集合长度;当i=0时,表示负组,即l+i为负类轮廓线集合长度且l-i为正类轮廓线集合长度;l+0为标注的断裂面轮廓线长度;l-0为标注的非断裂面轮廓线长度;l为点集长度相似度值,值越小相似度越高。
4)断裂面和非断裂面轮廓线区分。根据非断裂面轮廓线一般为圆弧这一特点,将相似度最高的2分类轮廓线分为断裂面和非断裂面轮廓线。
3 实验仿真及结果分析
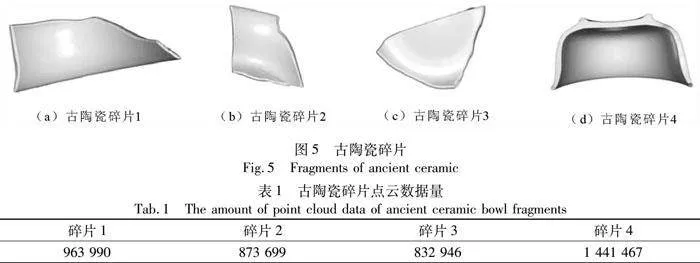
本实验在Windows 10环境和Pycharm 2022开发平台下,使用Python语言结合Open3d库进行实现。实验设备为一台标准PC,具有CPU Inter Core i7 2.70 GHz处理器和8 GiB内存。选取了通过EinScan-SP 3D扫描仪获取的一组古陶瓷碎片作为实验数据,其样式和数据量分别如图5和表1所示。通过对图5中的4个古陶瓷碎片进行实验仿真,对本算法的性能进行充分评估和分析,从而验证本算法在古陶瓷碎片轮廓线提取中的实际效果和可行性。
3.1 实验仿真
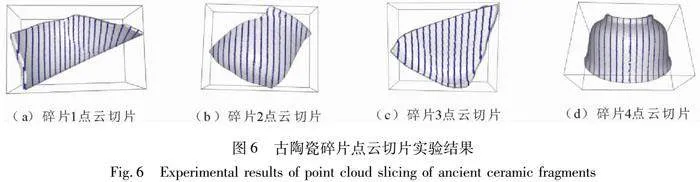
3.1.1 点云切片实验
在点云切片实验中,不同碎片的切片参数选取分别如表2和表3所示。图6为当选取切平面数量为L/5时,点云切片步骤的实验结果。从图6可以发现,通过点云切片步骤可以对整个古陶瓷碎片进行切片,已经实现了对碎片点云的分层处理和数据简化。
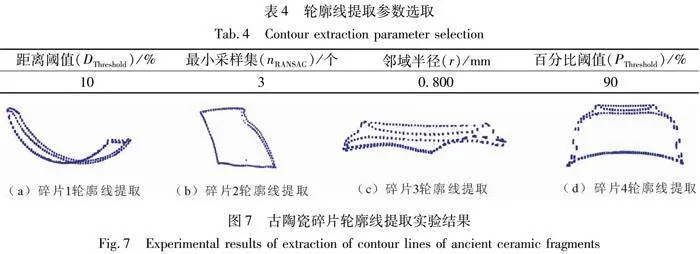
3.1.2 轮廓线提取实验
在轮廓线提取实验中,轮廓线提取实验参数选取和实验结果分别如表4和图7所示。从图7可以发现,该步骤可以有效地识别出碎片点云的轮廓线,且具有较高的准确性和完整性。
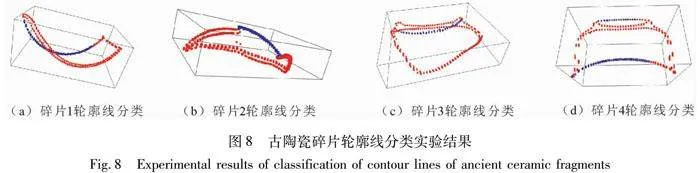
3.1.3 轮廓线分类实验
在轮廓线分类实验中,不同碎片的轮廓线分类实验结果如图8所示。从图8可以发现,该步骤可以有效且快速地实现对断裂面和非断裂面轮廓线的分类。
3.2 实验结果分析
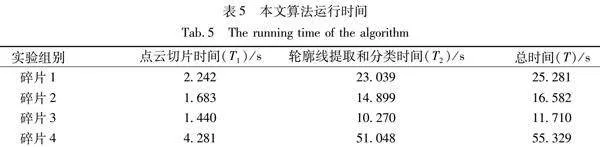
3.2.1 算法运行时间
本算法针对古陶瓷碎片的运行时间如表5所示。其中,T为本算法运行总时间,包括点云切片时间T1、轮廓线提取和分类时间T2两个部分。
3.2.2 算法效果分析
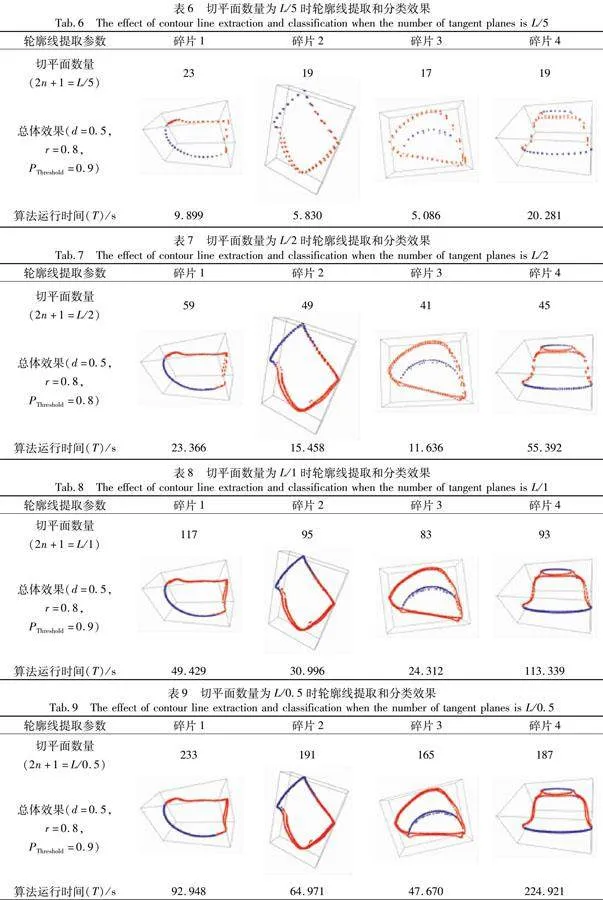
为了研究切平面数量对本算法的影响,在实验环境、实验对象恒定的条件下,保持除切平面数量以外的实验参数不变,只改变切平面数量,分别取切平面数量为L/5、L/2、L/1和L/0.5,探究切平面数量对轮廓线提取效果和算法运行时间的影响,其实验结果分别如表6、表7、表8和表9所示。
实验结果表明,随着切平面数量的增加,轮廓线提取效果逐渐增强,但算法运行时间也相应增加。当切平面数量设置为长度的1/5时,切片数量过少,虽然算法运行时间较短,但轮廓线提取效果较差;当切平面数量设置为长度的全长或全长的两倍时,切片数量太多,虽然轮廓线提取效果显著改善,但算法运行时间过长;仅当切平面数量设置为长度的1/2时,切片数量适中,轮廓线提取效果和算法运行时间均达到较为理想的平衡点。
为了进一步量化评估本算法的轮廓线提取精度,对提取到的古陶瓷碎片轮廓线进行定量评价,使用CloudCompare软件的标记工具,标记出了碎片点云的轮廓线,并对真实点云轮廓线数据进行保存。采用精确率(Precision)、召回率(Recall)、F1分数(F1 Score)作为评价指标定量分析提取结果,其公式分别为:
P=TP[]TP+FP,(6)
R=TP[]TP+FN,(7)
F1=2×P×R[]P+R=2TP[]2TP+FP+FN,(8)
式中,TP为识别正确的轮廓点个数;FP为识别错误的轮廓点个数;FN为漏计的轮廓点个数;P为精确率,表示轮廓线提取的正确性;R为召回率,表示轮廓线提取的完备性;F1为F1 Score,表示同时考虑正确性和完备性。
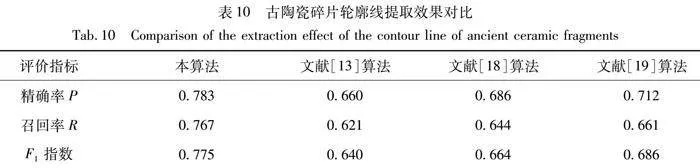
同时,将本文算法与文献[13]、文献[18]、文献[19]中的算法进行比较,其对比结果如表10所示。
经过分析发现:文献[13]的算法,由于采用多次投影造成数据丢失而导致算法精度较低;文献[18]的算法,由于采用传统法线估计方法而导致精度不足;文献[19]的算法,由于古陶瓷碎片边缘不完全尖锐而导致算法精度不理想;本算法可以避免上述问题进而改善算法性能。
同时,实验结果表明,本算法在古陶瓷碎片轮廓线提取方面取得了较好的效果,其准确率、召回率和F1分数分别为78.3%,76.7%和77.5%。与文献[13]、[18]、[19]的算法相比,本算法的准确率提高了18.64%,14.14%和9.97%,召回率提高了23.51%,19.10%和16.04%,F1分数提高了21.09%,16.72%和12.97%,具有更优的古陶瓷碎片轮廓线提取效果。
4 结语
本研究针对古陶瓷碎片胎体较薄、形状不规则且点云数据量大而导致其轮廓线提取精度较差、时间过长等问题,提出了一种基于切片邻域点集稠密度的古陶瓷碎片轮廓线提取算法,解决了古陶瓷碎片轮廓线的精确和快速提取及分类问题。实验结果表明,在百万级点云数量的古陶瓷碎片轮廓线提取方面,本算法运行时间可控制在15~25 s,并且所提取到的轮廓线的准确性可达78.3%,具有较高的准确性和完整性,可以为后续古陶瓷数字化修复工作提供依据。在后续的工作中,进一步提高轮廓线分类算法的精度将是一个重要的研究方向。
参考文献
[1] 兰静.考古文物绘图轮廓线提取及绘图流程研究[J].文物鉴定与鉴赏,2022,230(11):174-177.
LAN J.Research on the extraction of contour lines and drawing process of archaeological artifacts[J].Identification and Appreciation to Cultural Relics,2022,230(11):174-177.
[2] 侯妙乐,赵思仲,杨溯,等.文物三维模型虚拟修复研究进展、挑战与发展趋势[J].遗产与保护研究,2018,3(10):1-10.
HOU M L,ZHAO S Z,YANG S,et al.Research progress,challenges and development trends of virtual restoration of 3D model of cultural relics[J].Heritage and Protection Research,2018,3(10):1-10.
[3] 耿国华,张鹏飞,刘雨萌,等.基于断裂面邻域特征的文物碎片拼接[J].光学精密工程,2021,29(5):1169-1179.
GENG G H,ZHANG P F,LIU Y M,et al.Reassembly method of cultural relic fragments based on theneighborhood characteristics of fracture surface[J].Optics and Precision Engineering,2021,29(5):1169-1179.
[4] 王飘,耿国华,杨稳,等.结合表面纹理与断裂轮廓的碎片拼接方法[J].计算机工程,2019,45(2):315-320.
WANG P,GENG G H,YANG W,et al.Fragment splicing method combined with surface texture and fracture contour[J].Computer Engineering,2019,45(2):315-320.
[5] 尚冲,曹利钢,冯浩,等.基于形状度量的陶瓷碎片二维拼接算法研究[J].陶瓷学报,2021,42(2):320-324.
SHANG C,CAO L G,FENG H,et al.Two-dimensional stitching algorithm of potsherd based on shape constraint[J].Journal of Ceramics,2021,42(2):320-324.
[6] DERECH N,TAL A,SHIMSHONI I.Solving archaeological puzzles[J].Pattern Recognition,2021,119:108065.
[7] SAMPATH A,SHAN J.Segmentation and reconstruction of polyhedral building roofs from aerial lidar point clouds[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(3/2): 1554-1567.
[8] MOGHADAM P,BOSSE M,ZLOT R.Line-based extrinsic calibration of range and image sensors[C]∥IEEE International Conference on Robotics and Automation.Karlsruhe: Germany, 2013: 3685-3691.
[9] TIAN P J,HUA X H,TAO W Y,et al.Robust extraction of 3D line segment features from unorganized building point clouds[J].Remote Sensing, 2022, 14(14): 32-79.
[10]程效军,方芳.基于形态学的散乱点云轮廓特征线提取[J].同济大学学报(自然科学版),2014,42(11):1738-1743.
CHENG X J,FANG F.Morphology-based scattered point cloud contour extraction[J].Journal of Tongji University(Natural Science),2014,42(11):1738-1743.
[11]YU B,HU J L,DONG X J,et al.A robust automatic method to extract building facade maps from 3D point cloud data[J].Remote Sensing,2022,14(16):38-48.
[12]刘建兴,胡全一,乐美燕,等.直线段检测算法在机载LiDAR建筑物轮廓线提取中的应用[J].测绘通报,2023(10):145-149.
LIU J X,HU Q Y,LE M Y,et al.Application of line segment detector algorithm in extracting buildingcontour lines from airborne LiDAR[J].Bulletin of Surveying and Mapping,2023(10):145-149.
[13]徐锦芳,罗小龙,蒋卫东,等.顾及局部特征的三维点云建筑物轮廓精确化提取[J].测绘通报,2023(8):51-56.
XU J F,LUO X L,JIANG W D,et al.Extracting accurate building outlines from 3D point clouds consideringlocal features[J].Bulletin of Surveying and Mapping,2023(8):51-56.
[14]于微波,钱柏竹,杨宏韬,等.基于轮廓点的三维点云配准[J].组合机床与自动化加工技术,2022(12):1-5.
YU W B,QIAN B Z,YANG H T,et al.3D point cloud registration based on contour points[J].Modular Machine Tool & Automatic Manufacturing Technique,2022(12):1-5.
[15]ZHANG W N,CHEN L W,XIONG Z Y,et al.Large-scale point cloud contour extraction via 3D guided multi-conditional generative adversarial network[J].ISPRS Journal of Photogrammetry and Remote Sensing,2020,164:97-105.
[16]ZHENG S Y,HUANG R Y,LI J,et al.Reassembling 3D thin fragments of unknown geometry in cultural heritage[J].ISPRS Annals of Photogrammetry,Remote Sensing and Spatial Information Sciences, 2014, 5(1): 393-399.
[17]惠振阳,胡海瑛,李娜,等.改进的Alpha-shapes建筑物轮廓线提取算法[J].激光与光电子学进展,2022,59(10):447-455.
HUI Z Y,HU H Y,LI N,et al.Improved alpha-shapes building profile extraction algorithm[J].Laser & Optoelectronics Progress,2022,59(10):447-455.
[18]李帅,杜玉红.基于改进3RDP算法的法线估计散乱点云轮廓提取[J].激光与光电子学进展,2021,58(16):297-305.
LI S,DU Y H.Boundary extraction of scattered point cloud with normal estimation based on improved 3RDP algorithm[J].Laser & Optoelectronics Progress,2021,58(16):297-305.
[19]韩玉川,侯贺,白云瑞,等.一种基于边缘系数的闭合点云边缘提取算法[J].激光与光电子学进展,2018,55(11):161-166.
HAN Y C,HOU H,BAI Y R,et al.A closed point cloud edge extraction algorithm using edge coefficient[J].Laser & Optoelectronics Progress,2018,55(11):161-166.
[20]杨振清,雍永磊.基于点云切片的边界提取[J].计算机应用与软件,2014,31(1):222-224.
YANG Z Q,YONG Y L.Boundary extraction based on point cloud slices[J].Computer Applications and Software,2014,31(1):222-224.
[21]王玉文,李珊君,杨赟秀,等.基于有向包围盒的尺度点云配准算法[J].激光杂志,2022,43(1):12-18.
WANG Y W,LI S J,YANG Y X,et al.Scale point cloud registration algorithm based on oriented bounding[J].Laser Journal,2022,43(1):12-18.
[22]刘金锦,李浩军.基于点云切片改进法的不规则物体体积测量[J].光学学报,2021,41(23):133-145.
LIU J J,LI H J.Volume measurement of irregular objects based on improved point cloud slicing method[J].Acta Optica Sinica, 2021, 41(23): 133-145.
[23]赵传,郭海涛,卢俊,等.结合区域增长与RANSAC的机载LiDAR点云屋顶面分割[J].测绘学报,2021,50(5):621-633.
ZHAO C,GUO H T,LU J,et al.Roof segmentation from airborne LiDAR by combining region growing with random sample consensus[J].Acta Geodaetica et Cartographica Sinica,2021,50(5):621-633.
[24]陈朋,周大伟.点到平面距离的点云数据压缩方法[J].测绘科学,2015,40(8):117-120.
CHEN P,ZHOU D W.A point cloud data compression based on the point to plane distance[J].Science of Surveying and Mapping,2015,40(8):117-120.
[25]袁虎强,孙豪.点云分割方法性能评价与对比分析[J].测绘科学,2021,46(9):130-135.
YUAN H Q,SUN H.Performance evaluation and comparison analysis of point cloud segmentation method[J].Science of Surveying and Mapping,2021,46(9):130-135.
(编 辑 雷雁林)
基金项目:国家自然科学基金(201012279);硅酸盐质文物保护教育部重点实验室(上海大学)开放课题(SCRC2024KF04TS);陕西省地下文物保护利用协同创新中心项目(22JY008)。
第一作者:王莹,女,副教授,从事文物数字化保护与修复研究,wangying@sust.edu.cn。
通信作者:刘鹏欢,男,从事文物数字化保护研究,liu13484509947@163.com。
