无人机空中交通管理体系架构研究
2025-01-24何志凯舒振杰王晓华等
关键词:无人机;空中交通管理;体系架构;标准
DOI编码:10.3969/j.issn.1674-5698.2025.01.014
0 引言
近年来,无人机应用已由消费娱乐逐步遍布物流运输、农林植保、电力巡检、国土测绘、安防、消防等各个领域,并开始载人运输初步尝试[1]。根据中国民航局发布数据显示,截至2023年底,我国注册无人机共126万架。虽然无人机的生产及应用已相对成熟,处于世界领先地位,但我国民用无人机产业的发展并不顺利,在管理上遇到了一系列问题和瓶颈,最为突出的是飞行安全和空中交通管理问题。
无人机大量无序的低空飞行会对地面设施、公共安全、空中载人飞行器等带来巨大危害[2]。造成这种现状的原因来自多个方面:(1)低空运行的无人机数量多,体积小,执行任务复杂多样,不好监管;(2)现行民用航空是传统的窄带通信技术,无法满足大量的无人机更大的带宽通信需求;低空无人机的导航技术需要结合基站定位、视觉导航等新兴技术;现有民航的监视技术也难以满足低空轻小无人机的监视需求;(3)无人机缺乏有效的信息获取手段,难以全面、及时感知规避障碍物,导致空中碰撞的风险增加[3]。
此外,现有的空中交通管理仍然是20世纪30年代发展起来的管理方式,走的是辅助飞行员驾驶的技术途径;而无人机的驾驶员在地面,所以针对无人机空中交通管理(UTM),需结合现有物联网以及信息化技术等,实现更加智能和自动化的交通管理。这些变化对空中交通管理(ATM)体系带来整体性冲击,尤其是对体系架构与标准的影响巨大。因此,有必要针对无人机空中交通管理开展体系架构研究,构建适用于我国国情的无人机空中交通管理体系架构及标准,推动我国无人机产业和低空经济发展[4]。
1 无人机空中交通体系架构层级及管理方式
1.1 无人机空中交通管理体系架构层级
无人机空中交通管理的最终目标是基于不同的地理条件和不同的应用目的推动具有不同能力的无人机在低空空域有序飞行,并进一步拓展到载人航空器等[5]。
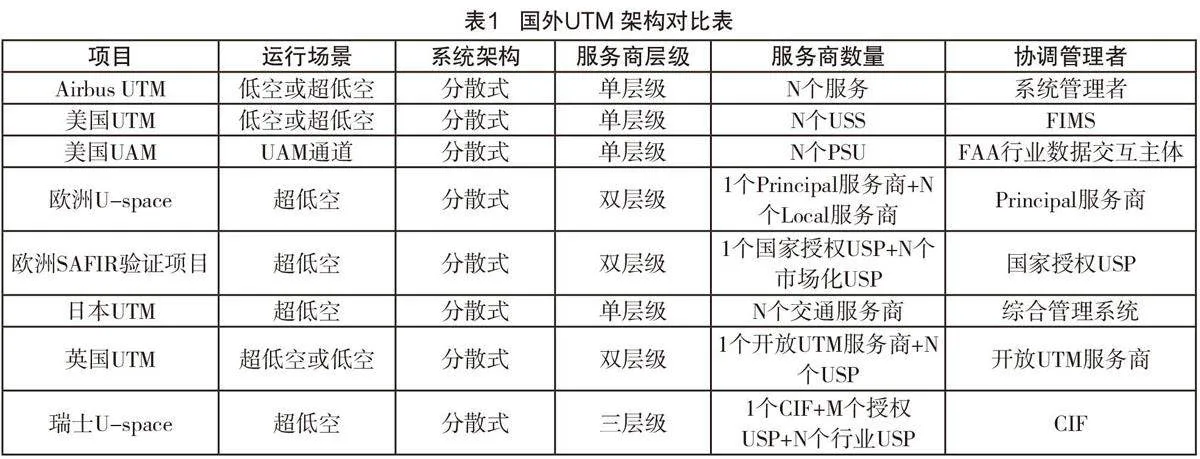
从国外无人机空中交通管理体系架构来看(见表1),无人机空中交通管理体系架构分为集中式管理和分散式管理两种[6]。
(1)集中式管理:将全国所有的无人机交通信息集中到由民航局授权的一个交通服务商UTM系统中,授权唯一的交通服务商统筹管理所有的无人机飞行活动。UTM 架构通常为单层级。
(2)分散式管理:将全国所有的无人机交通信息分散到多个交通服务商中,服务商建立自身的UTM系统,系统间信息共享,形成服务网络,为无人机运行人提供服务。UTM架构通常为单层级、双层级、三层级。当UTM为单层级架构时,所有的无人机空中交通服务均由N个市场化服务商提供服务。当UTM为双层级架构时,有两种情况。一种是根据服务范围划分,即由1个全国性服务商和N个区域性服务商提供服务;另外一种是根据服务类型划分,即由1个共同信息服务商和N个市场化服务商提供服务。当UTM为三层级架构时,根据服务的类型差异,由1个共同信息服务商、M个国家服务商、N个市场化服务商提供服务。
1.2 无人机空中交通管理方式
针对不同的无人机空管体系架构,空管系统中解决冲突的方式有中心化管理和去中心化管理两种方式。
(1)中心化管理
将所有的交通信息集中到无人机交通服务商的UTM系统中,由系统指令每一个航空器的飞行动作,所有航空器按照指令执行。中心化管理方式可以最大程度地避免无人机空中可能的冲突,并通过指挥中心调配好每一架无人机的飞行线路和时间,可以在大飞行量下保证空域的安全运行。但此种冲突管理方式将需要考虑无人机的反应速度以及相应的余度,从而增大相互间隔而导致空域利用效率下降[7]。
(2)去中心化管理
无人机交通服务商提供信息共享,鼓励无人机操作员按照管理机构设立好的规则,共享了解相互间的意图并避免可能的冲突。去中心化管理的主要理念是根据所在区域的流量采用相应的管控方式。无人机操作员可以通过交通服务提供商获取空中交通相关的共享信息,并通过无人机交通服务商进行时间以及飞行区域的相互协调,达到战略上冲突解除以及基于设定好的规则战术上解除冲突,以达到最大程度的空域利用。但基于自主冲突解除的管理方式将无法应用于大飞行量空域,且需要无人机具有良好的安全意识[8]。
2 无人机空中交通管理体系架构设计
2.1 基本原则
无人机空管体系架构设计遵循以下基本原则:
(1)服务主导:基于不同交通管理服务需要,满足不同运行或管理需求。
(2)安全聚焦:以保证飞行安全为底线,不影响现行有人航空的正常运行。
(3)市场开放:满足市场多元化应用需求,鼓励服务商提供定制化的增值服务。
(4)标准统一:统一的数据交互规则和标准,提供规范化的数据服务。
(5)场景导向:满足不同运行场景的需求,衔接无人机与有人机融合空域的运行。
(6)全球互联:兼容国内外通用的无人机管理规则,建立全球互联的体系。
遵循上述基本原则,结合目前的无人机管理现状,以构建一个网络化、可协调的、全球可互用的民用无人机空管运行管理体系为目标,提出3种UTM架构,即集中式UTM架构、分散式1+N双层级UTM架构、分散式1+M+N三层级UTM架构。
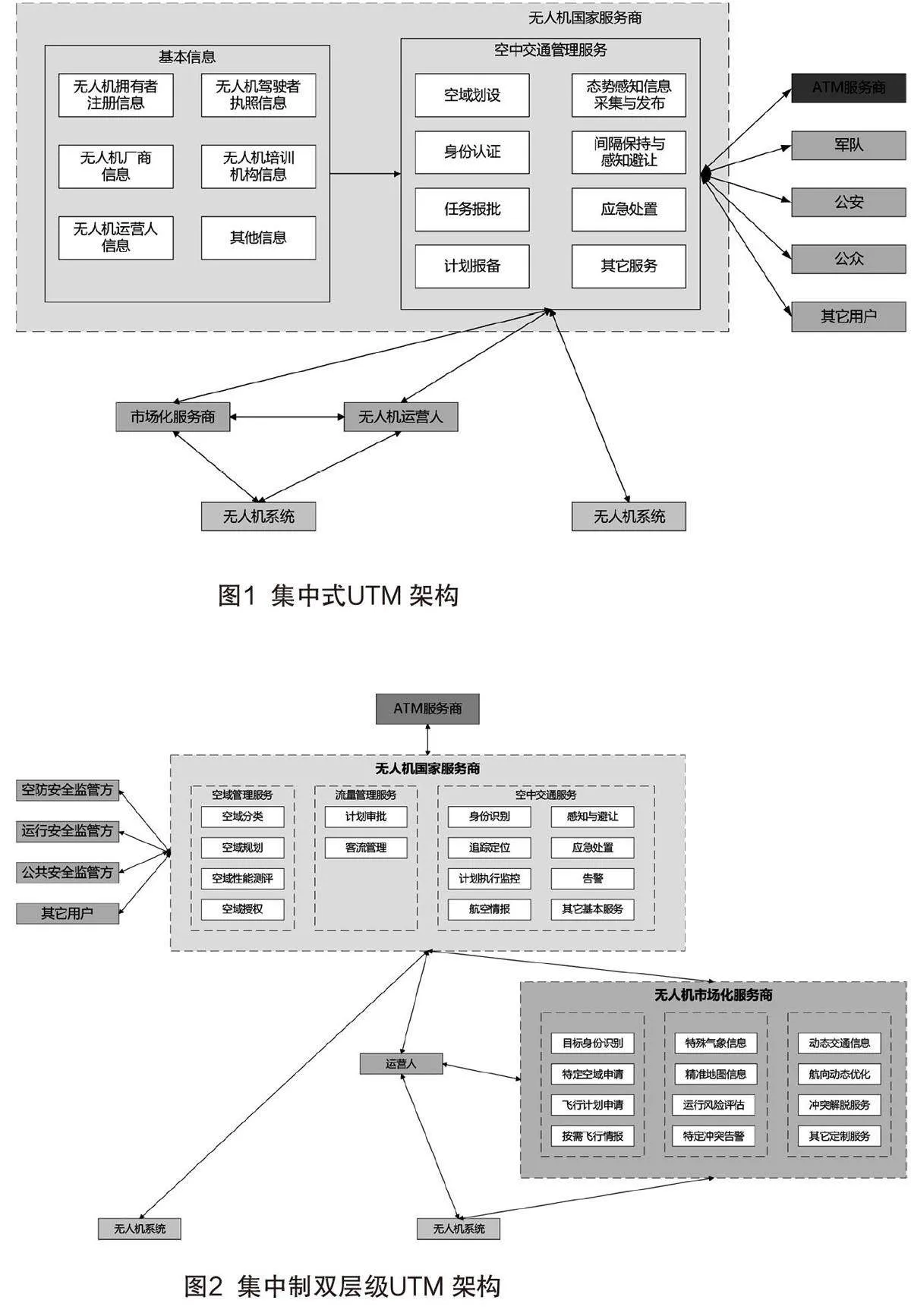
2.2 集中式UTM架构
集中式UTM架构是指由民航局授权或设立一个无人机国家服务商提供无人机空中交通服务,通过集中式无人机运行管理系统(CUOMS)进行管理。CUMOS统一受理所有的无人机飞行计划,调配每一架无人机的飞行线路和时间。此时的无人机国家服务商是综合型SUSP。
ATM服务商为有人机提供空管服务的单位,与无人机国家服务商协调涉及管制空域无人机的飞行活动,必要时与无人机建立通信联系。
CUMO S提供的服务主要包含基础数据管理服务、空中交通管理服务。其中,基础数据管理服务针对注册、适航、驾驶员执照、维修等进行的管理。空中交通管理服务则考虑了无人机空管与传统有人机空管的综合ATM体系。
在信息交互上,无人机可以直接向CUOMS传输数据,也可通过无人机市场化服务商、运营人等进行中转传输。军队、公安、公众等用户可以与CUOMS交互诸如:飞行动态数据、飞行计划、适飞空域、气象信息、飞行通知公告等。
虽然集中式UTM架构存在无人机市场化服务商,但无人机市场化服务商是作为无人机或无人机运营人与无人机国家服务商的数据中转枢纽,本身不具备直接为无人机提供空管服务的能力。所有的空管信息均需要从无人机国家服务商获取。
2.3 分散式1+N双层级UTM架构
分散式1+N双层级UTM系统架构存在集中制双层架构和竞争制双层架构两种类型。
(1)集中制双层UTM架构
集中制双层UTM架构是指我国无人机由一个综合型无人机国家服务商和若干个无人机市场化服务商共同提供无人机空中交通管理服务,形成1+N体系架构。当同一个空域涉及多个运行人飞行冲突时,此时只能通过国家服务商进行集中调配。
其中,无人机国家服务商提供空域管理、流量管理、空中交通服务等基础性公共交通服务,是一个综合型SUSP;无人机市场化服务商根据地区或行业的需求提供特殊气象信息、按需飞行情报、动态交通信息、运行风险评估等定制交通服务。无人机市场化服务商可分为区域型无人机市场化服务商或行业型无人机市场化服务商。
无人机国家服务商与空防安全监管方、运行安全监管方交互业务所需的信息。其中,空防安全监管方发布空域划设与授权数据,运行安全监管方提供注册登记、航空器适航管理、空中交通管理规范等基础数据服务。
ATM服务商为有人机提供空管服务的单位,与无人机国家服务商协调涉及管制空域无人机的飞行活动,必要时与无人机建立通信联系。
公共安全监管方等用户可以与无人机国家服务商进行数据交互,例如:包括飞行动态数据、飞行计划、适飞空域、飞行通知公告等。无人机系统可以直接通过无人机国家服务商获得基础性空中交通服务信息,也可通过无人机市场化服务商进行中转获得所需的空中交通服务信息。
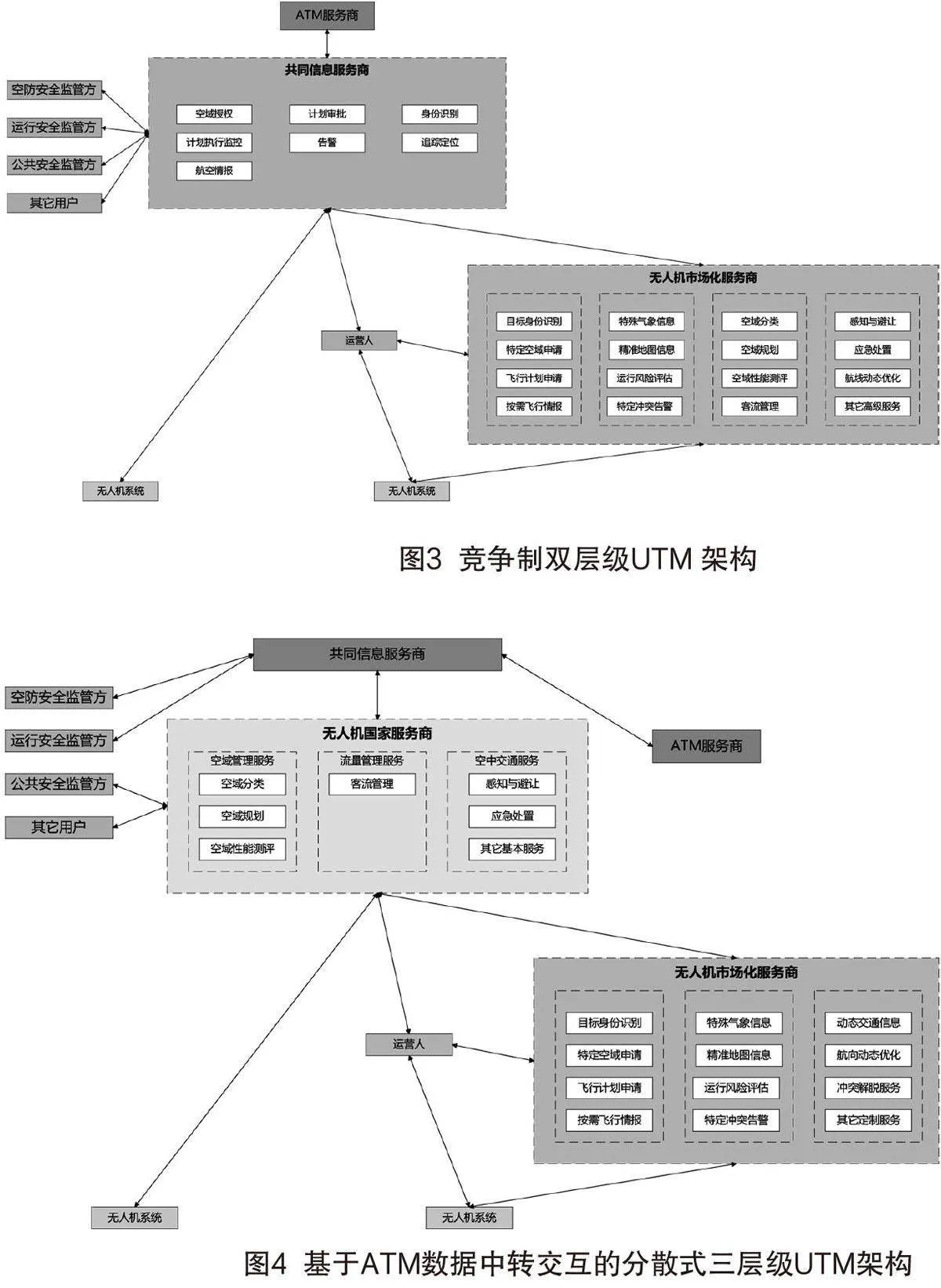
(2)竞争制双层UTM架构
竞争制双层UTM架构是指我国无人机由一个基本型无人机国家服务商(称为共同信息服务商)和若干个无人机市场化服务商共同提供无人机空中交通管理服务,形成1+N体系架构。当一个空域涉及多个运行人飞行冲突时,由属地化的市场化服务商进行调配,国家服务商仅提供基本态势信息,不提供实时流量管理功能。
其中,共同信息服务商提供的服务包括空域授权、计划审批、身份识别、追踪定位、飞行计划监控、航空情报、告警等基本空中交通服务,是一个基本型SUSP;无人机市场化服务商为授权的区域型服务商,除了根据地区需求提供特殊气象信息、按需飞行情报、动态交通信息、运行风险评估等定制交通服务,还提供国家服务提供商涉及的高级空中交通服务,包括空域分类、空域规划、空域性能评估、容流管理、感知与避让、应急处置等服务。
共同信息服务商与空防安全监管方、运行安全监管方交互业务所需的信息。其中,空防安全监管方发布空域划设与授权数据,运行安全监管方提供注册登记、航空器适航管理、空中交通管理规范等基础数据服务。
ATM服务商为有人机提供空管服务的单位,与共同信息服务商、无人机市场化服务商协调涉及管制空域无人机的飞行活动,必要时与无人机建立通信联系。
公共安全监管方等用户可以与共同信息服务商进行数据交互,例如:包括飞行动态数据、飞行计划、适飞空域、飞行通知公告等。无人机系统可以直接通过共同信息服务商获得基础性空中交通服务信息,也可通过无人机市场化服务商进行中转获得所需的空中交通服务信息。
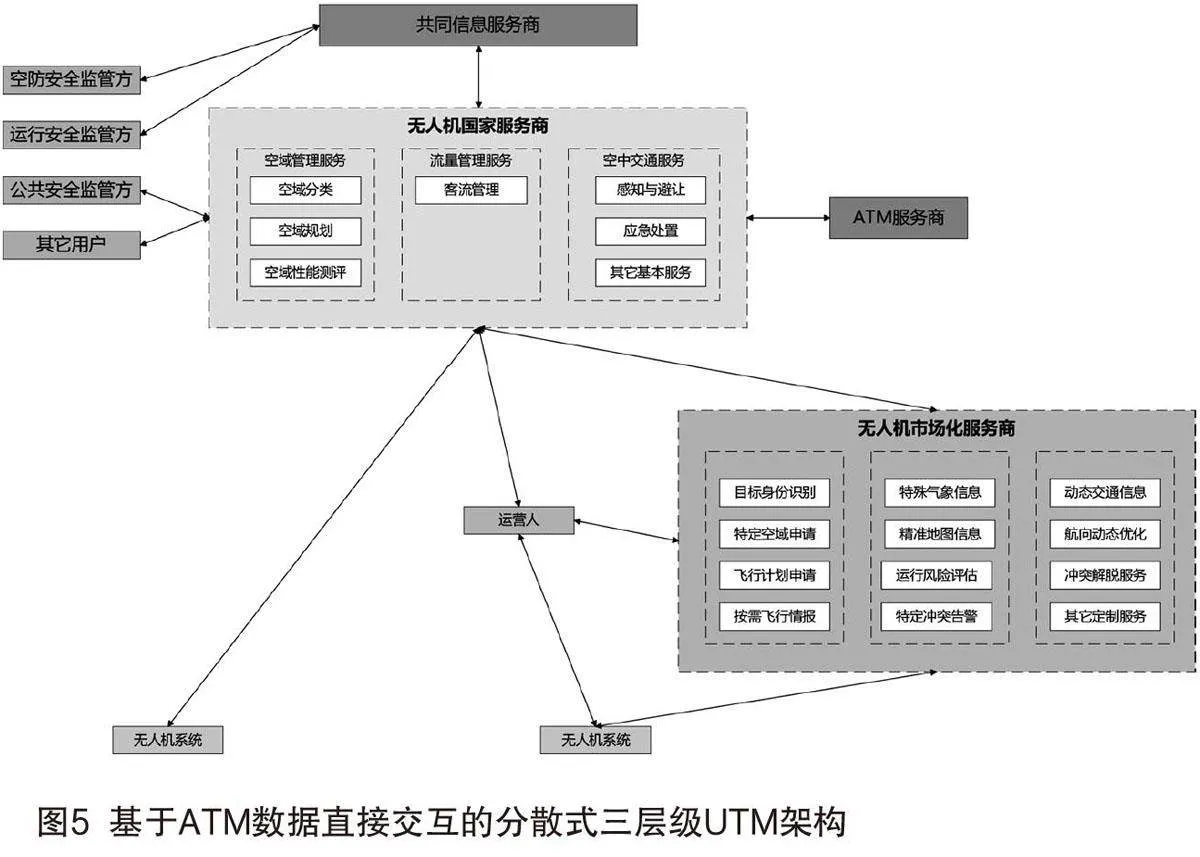
2.4分散式1+M+N三层级UTM架构
分散式三层级U TM系统架构是指我国无人机由一个共同信息服务商、若干个无人机国家服务商和若干个无人机市场化服务商共同提供无人机空中交通管理服务,形成1+M+N体系架构。
其中,共同信息服务商主要提供无人机基础性公共交通服务中基本信息服务,其角色定位为全国无人机公共性基础数据的采集平台,建立飞行计划数据库和飞行信息数据库,实现运行信息的实时采集与可视化监管,提供的服务包括空域授权、计划审批、身份识别、追踪定位、飞行计划监控、航空情报、告警等,其本质是基本型SUSP;无人机国家服务商提供空域管理、流量管理、空中交通服务等基础性公共交通服务的高级功能,其角色定位是为流量管理决策的中枢,提供的服务包括空域分类、空域规划、空域性能评估、容流管理、感知与避让、应急处置等服务,其本质是高级型SUSP;无人机市场化服务商提供特殊气象信息、按需飞行情报、动态交通信息、运行风险评估等定制交通服务。通常无人机国家服务商按照不同区域设置,即为区域型无人机国家服务商,其为区域中运行的无人机提供流量管理服务。
ATM服务商为有人机提供空管服务的单位,与无人机国家服务商或共同信息服务商协调涉及管制空域无人机的飞行活动,必要时与无人机建立通信联系。
共同信息服务商与空防安全监管方、运行安全监管方交互业务所需的信息。空防安全监管方发布空域划设与授权数据,运行安全监管方提供注册登记、航空器适航管理、空中交通管理规范等基础数据服务。
公共安全监管方等用户可以与无人机国家服务商进行数据交互,例如:包括飞行动态数据、飞行计划、适飞空域、飞行通知公告等。无人机系统可以直接通过无人机国家服务商获得基础性空中交通服务信息,也可通过无人机市场化服务商进行中转获得所需的空中交通服务信息。
考虑到无人机国家服务商与ATM服务商存在两种交互的情况:(1)与通过共同信息服务商中转交互;(2)无人机国家服务商与ATM服务商直接交互,分别设计两种分散式三层级UTM架构。
3 民用无人机飞行动态传输模式
在民用无人机飞行动态传输模式上,民航管理部门作为统一动态数据接收方,其他各管理部门之间的数据共享。并且根据参与组织实施民用无人机飞行活动的各相关方设计飞行动态传输的多种路径,保证数据源的唯一性。
民航管理服务部门统一收到民用无人机飞行动态之后,转发至其他相关部门,如:空域管理部门(军方)、公共安全管理部门(公安机关)、农林植保管理部门(农业、林业部门)、应急管理部门(应急管理部)等。
设计4 类主要飞行动态数据传输路径。(1)从无人机系统(机载系统或者地面控制站)直接发送飞行动态数据;(2)由无人机系统将数据发送至相应的飞行活动运营人(类似航空公司),之后由运营人转发至民航管理部门;(3)结合民用无人机管理存在引入市场化服务商(如:无人机云系统)的现状提出由无人机系统——市场化服务商——民航管理部门的路径;(4)针对极少数非协作式无人机,提供重点区域部署的地面探测设备报送其获取的飞行动态途径。需要说明的是,由于无人机市场化服务商应当为其覆盖的区域内提供包括飞行安全在内的相关服务,其必须掌握该区域内所有无人机的飞行动态。因此,无人机市场化服务商和民航管理服务方之间的飞行动态数据流是双向的。
4 结论
本文总结分析了国外无人机空中交通管理方式及体系架构层级,并结合我国无人机空中交通管理特点,归纳了无人机空中交通管理体系架构设计的基本原则[9],提出了集中式UTM架构、分散式集中制双层级架构、分散式竞争制双层级架构和分散式三层级架构,并给出民用无人机飞行动态传输模式和加快UTM标准建议,推动我国无人机产业和低空经济发展。
