带目标恢复的无人机长期白适应相关滤波跟踪算法
2025-01-22马浩然黄鹤林国庆高涛王会峰张科



关键词:目标跟踪,外观融合模型,正则化,通道可靠性,目标恢复
中图分类号:TP391. 4 文献标志码:A
随着无人航行器[1-2]技术的迅速发展,其对地面目标的跟踪技术成为目前的研究热点. Bol⁃me et al[3]首次将相关滤波引入到目标跟踪中,Henriques et al[4]在此基础上提出了CSK (Ex⁃ploiting the Circulant Structure of Tracking⁃by⁃De⁃tection with Kernels)算法,加入正则项来解决过拟合问题. KCF(Kernel Correlation Filter)算法[5]基于HOG[6]特征,进一步提高了目标跟踪的精确度. 在跟踪过程中,由于相机运动产生尺度问题,DSST (Discriminative Scale Space Tracking)算法[7]增加了尺度滤波器. SAMF (Scale Adaptivewith Multiple Features)算法提出一种多尺度方法,定义七个固定尺度的尺度池来确定目标尺度大小. SRDCF (Spatially Regularized Discrimina⁃tiv Correlation Filters)算法[8]引入空间正则化来解决边界效应的影响,但算法的速度受到限制.Staple (Complementary Learners for Real ⁃ Time Tracking)算法[9]将颜色直方图特征与HOG 特征融合来提高跟踪效果. BACF (Learning Back⁃ground ⁃ Aware Correlation Filters for VisualTracking)算法[10]对于背景的区分能力很强,但对于目标遮挡等复杂场景的效果不佳. STRCF(Earning Spatial ⁃ Temporal Regularized Correla⁃tion Filters for Visual" Tracking)算法[11]引入时间正则化来限制滤波器的更新,TLD (Tracking" ⁃Learning⁃Detection)算法[12]通过跟踪、学习、检测相结合来处理一些跟踪难题. Ma et al[13]提出一种基于分类器的LCT (Long ⁃ term CorrelationTracking)算法,用于目标丢失后对其再次检测,但跟踪精确度有待提高. 2020 年Li et al[14]提出一种在线自动自适应学习时空正则化项的新方法AutoTrack,目标跟踪技术广泛应用在工业和生活中. 当无人机跟踪地面运动目标时,面临着目标场景遮挡、光照变化等复杂情况,导致滤波模型性能下降. 为了解决该问题,本文提出一种无人机对地面目标的稳定实时跟踪算法,通过外观融合模型、自适应局部正则化限制滤波器和目标恢复三个方面进行改进,有效提升了滤波器性能,提高了目标跟踪的成功率和精确度,与其他算法相比,成功应对了目标移出视野、被遮挡等复杂场景下的跟踪挑战.
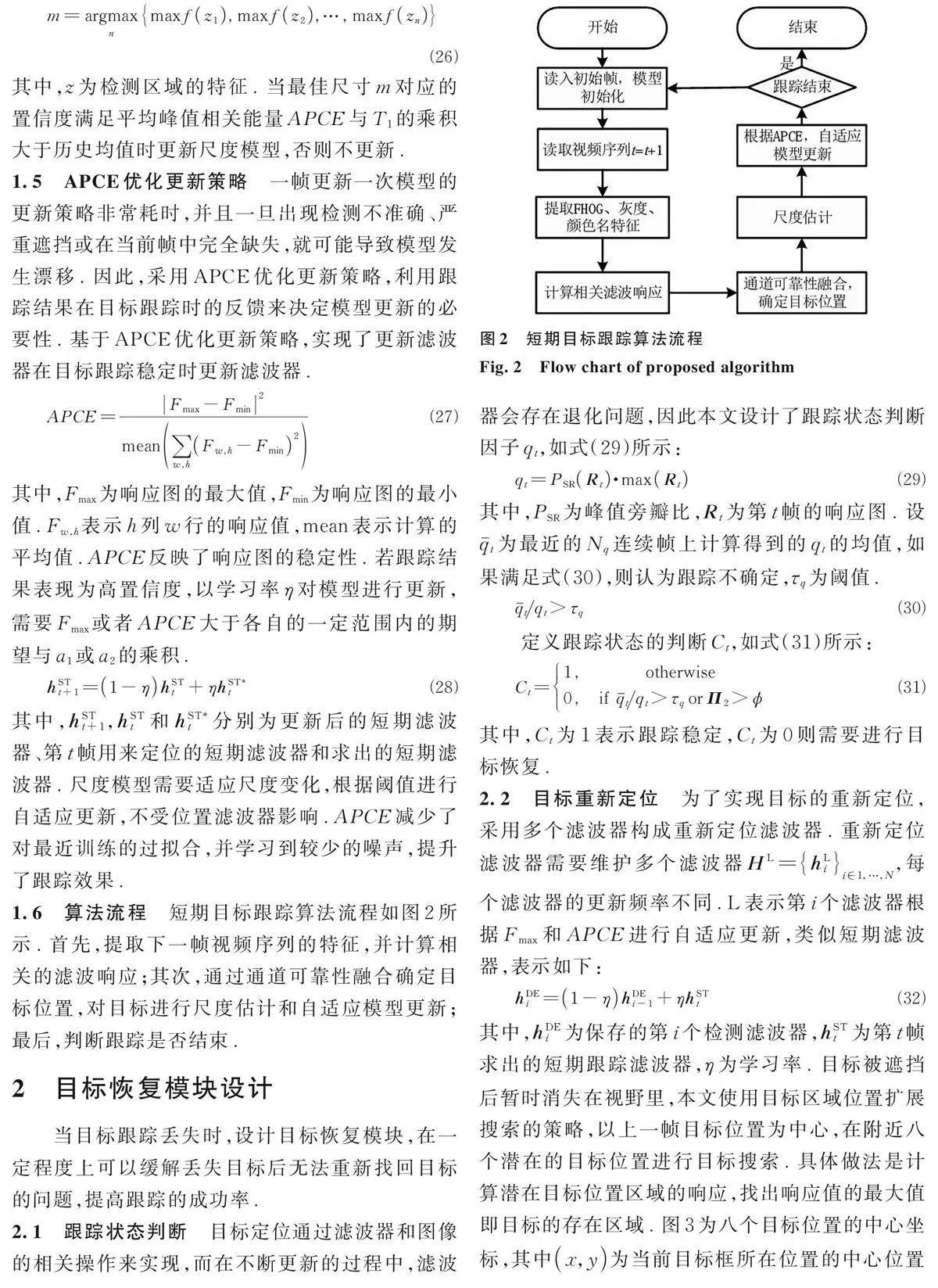
1改进算法
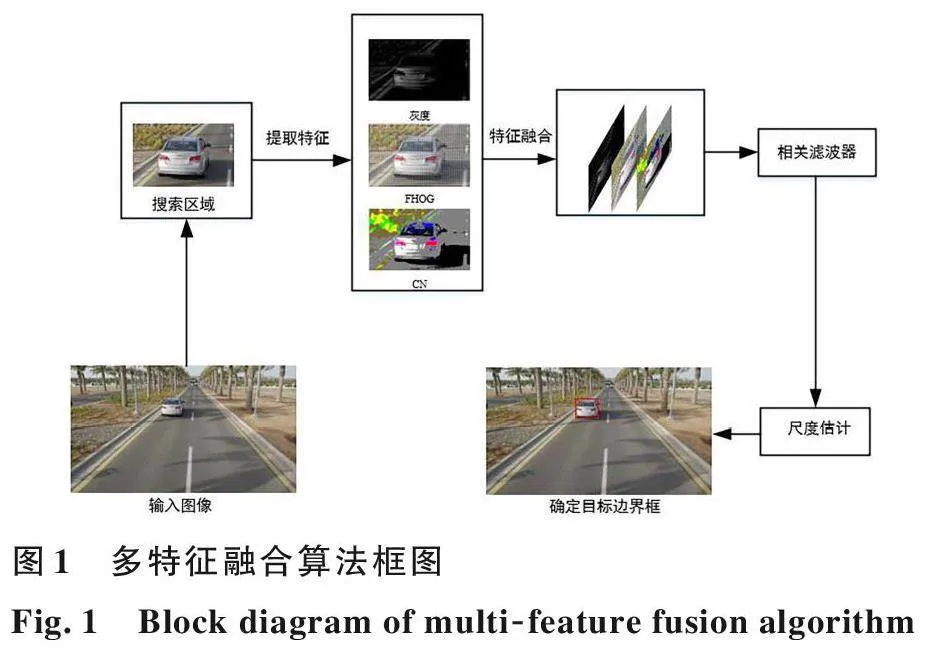
1. 1多特征融合 结合FHOG、灰度和CN 等特征构建外观融合模型,从三个不同的角度关注图像特征信息,流程如图1所示.
1. 2自适应局部时空正则化
1. 2. 1拟解决的问题 边界效应严重限制了跟踪性能,为了减少不合理样本引入了余弦窗,但余弦窗影响了对背景信息的学习,并且当目标移动到区域边缘时,余弦窗会导致目标的部分信息被去除,导致跟踪结果不佳甚至跟踪失败. 滤波器的更新影响目标跟踪的效果,在光照变化、遮挡和目标形变等复杂环境下,如果每帧更新滤波器,会导致滤波器跟踪效果不好以至跟踪失败. 大多数算法采用扩大搜索来应对复杂场景,但扩大搜索会带来大量的背景信息,从而影响滤波器的稳定性,使滤波器发生退化.
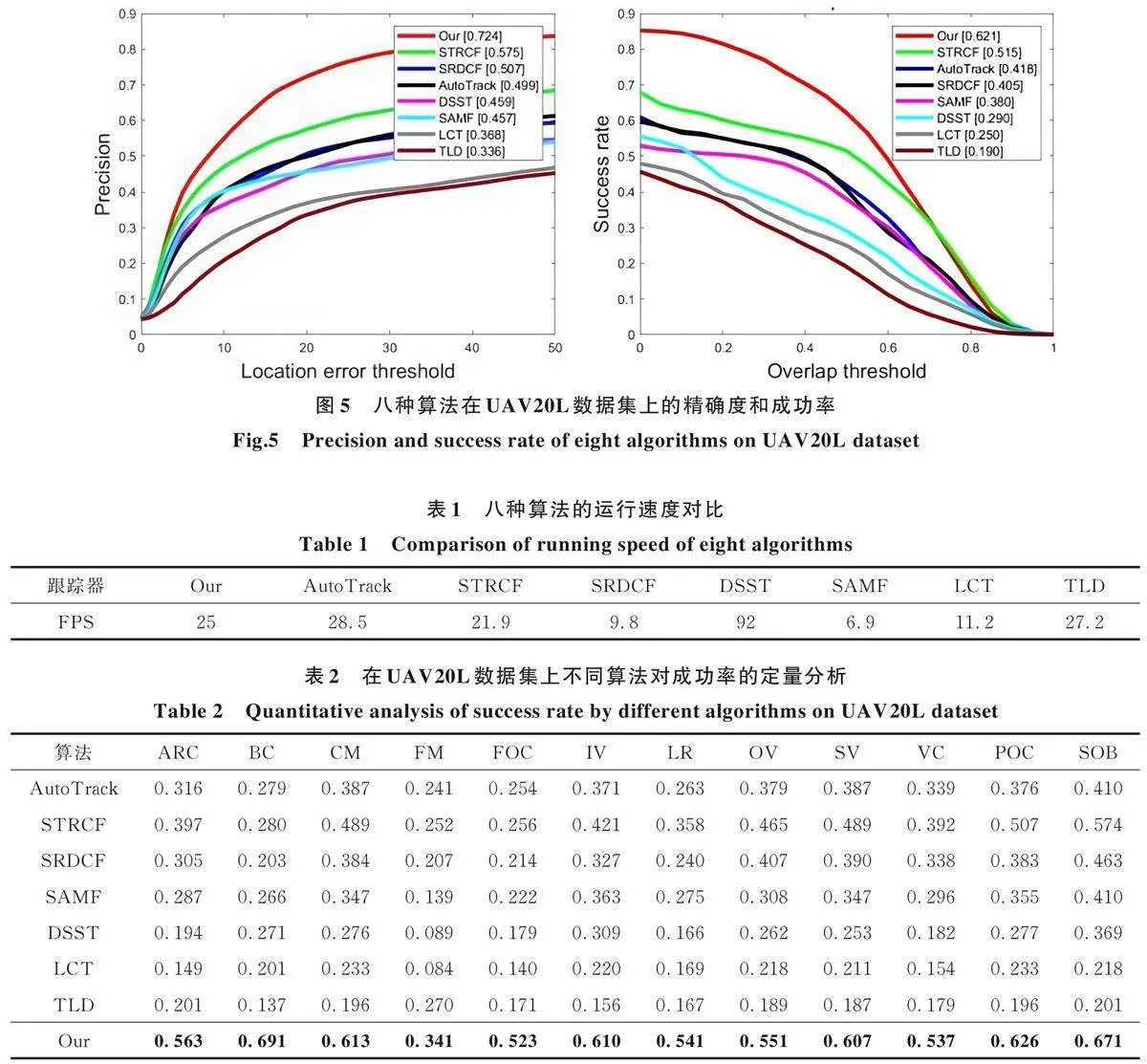
3. 3. 1总体性能评估 图5展示了八种算法在UAV20L 数据集上的精确度和成功率,由图可见,本文提出的算法精确度为0. 724,成功率为0. 621.与其他算法相比,本文提出的算法总体性能最优.由UAV20L 数据集上的测试结果可见,本文算法比STRCF,SRDCF,AutoTrack,DSST,SAMF,LCT 和TLD 算法精确度分别提高了0. 149,0. 217,0. 225,0. 265,0. 267,0. 365 和0. 388,成功率分别提高了0. 106,0. 203,0. 216,0. 241,0. 331,0. 371 和0. 431.表1 展示了八种算法运行速度的对比结果,由表可见,本文提出的算法的运行速度达25 FPS,满足实时性.
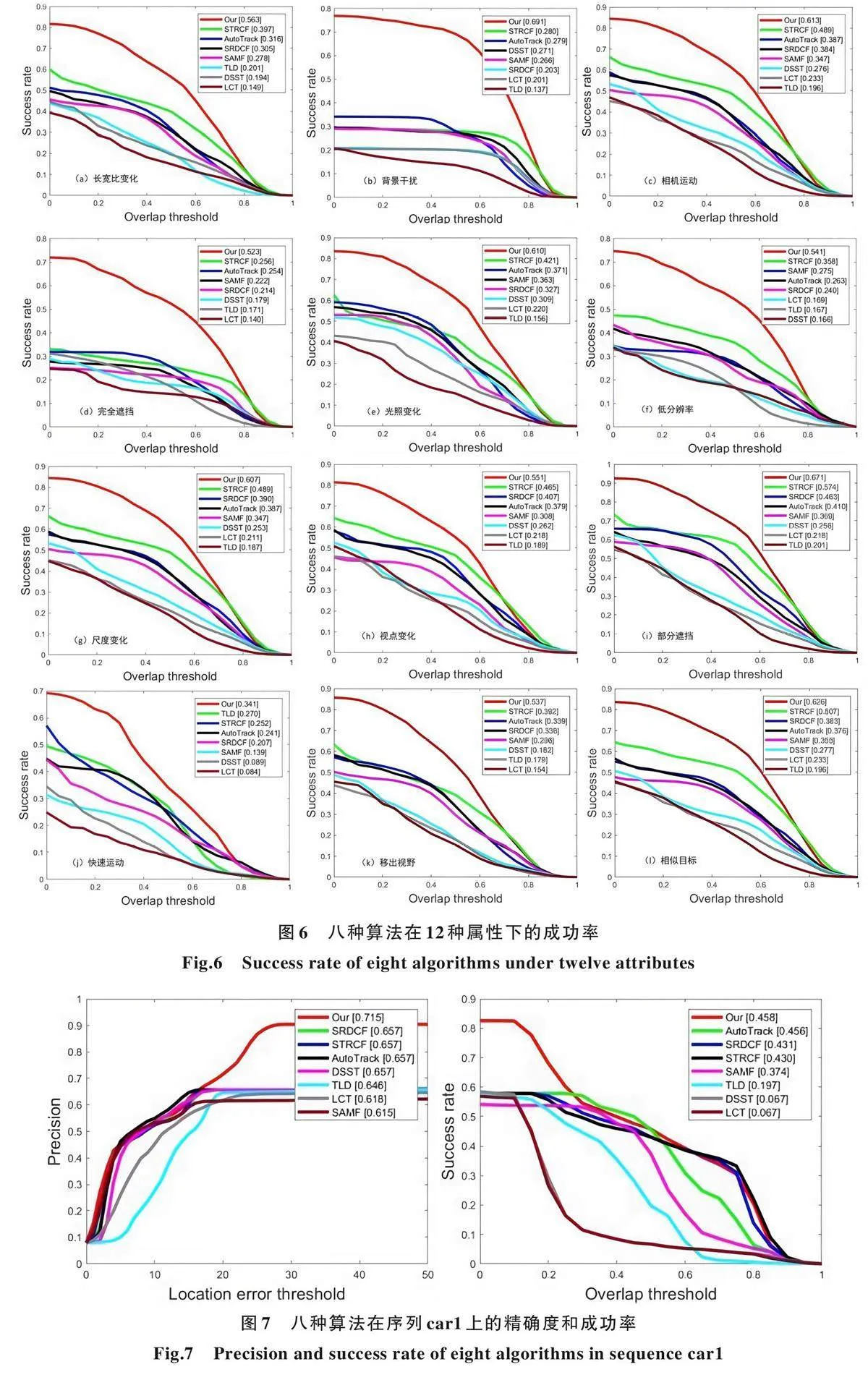
3. 3. 2属性性能分析 本文提出的算法在长宽比变化(ARC)、背景干扰(BC)、相机运动(CM)、快速运动(FM)、完全遮挡(FOC)、光照变化(IV)、低分辨率(LR)、移出视野(OV)、尺度变化(SV)、视点变化(VC)、相似目标(POC)、部分遮挡(SOB)12 种复杂场景下的定量分析结果如表2 所示,表中黑体字表示结果最优,跟踪效果对比如图6 所示.结果表明与其他算法相比,本文提出的算法在复杂场景下的适用性更优,跟踪效果更好.
3. 3. 3部分序列性能评估
3. 3. 3. 1 car1序列性能评估 图7 展示了八种算法在序列car1上的精确度和成功率,从定量方面分析,由图可见,在遮挡、形变等复杂场景的序列car1上,本文算法比STRCF,SRDCF,AutoTrack,DSST,SAMF,LCT 和TLD的精确度分别提高了0. 058,0. 058,0. 058,0. 058,0. 1,0. 097 和0. 069,成功率提高了0. 028,0. 027,0. 002,0. 391,0. 084,0. 391 和0. 261.
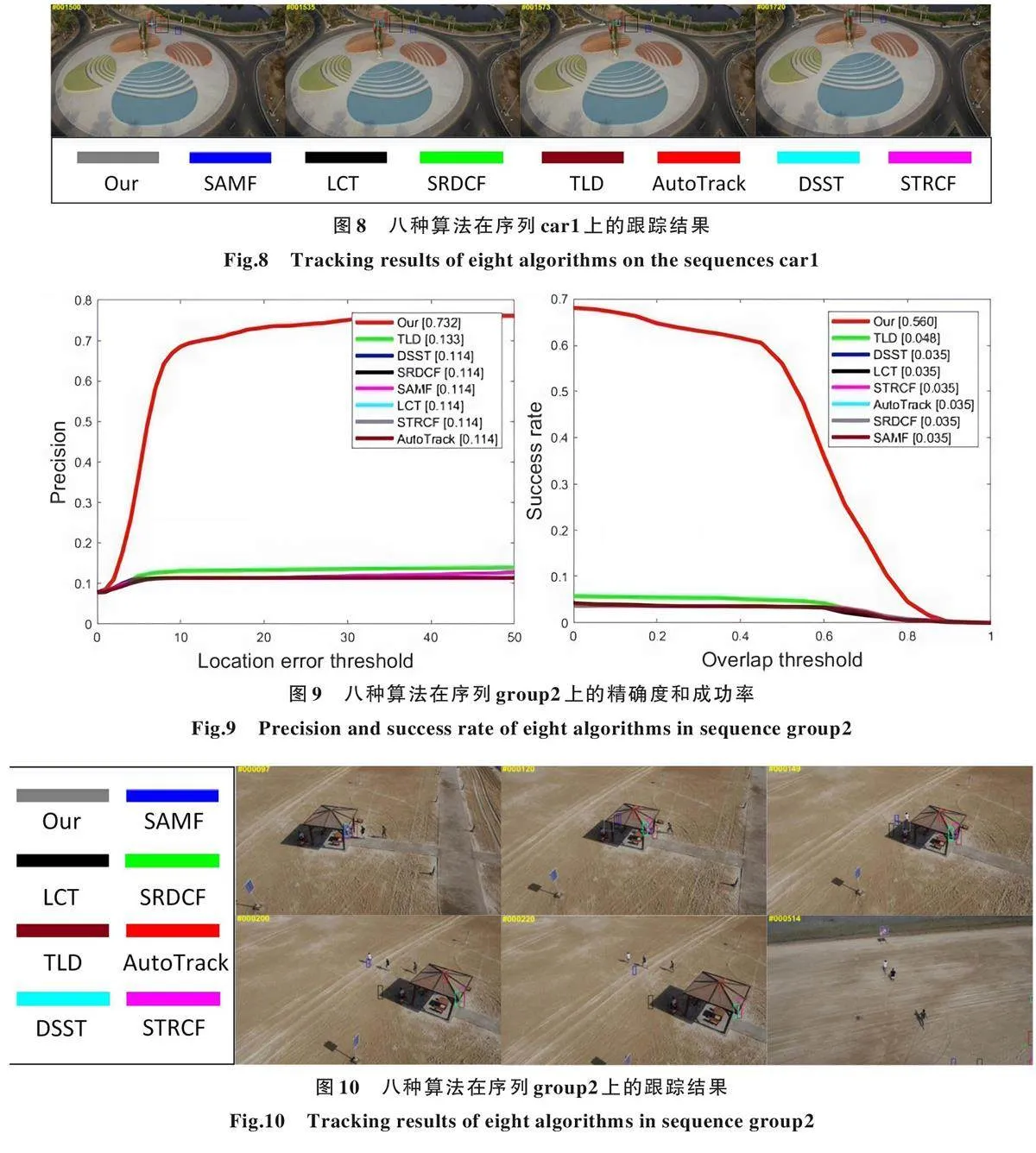
从定性方面分析,图8 展示了八种算法在序列car1上的跟踪结果,在序列car1第1500帧时,目标发生剧烈形变,SAMF 和LCT 算法已经跟踪失败,滤波器完全退化,DSST算法跟踪状况不佳,勉强实现定位. 第1535帧时目标在视野中消失,第1573帧时重新出现,只有本文提出的算法跟踪成功,第1720帧时依然只有本文提出的算法成功跟踪目标. 结果表明本文提出的算法在发生完全遮挡、丢失目标后可以成功找回目标,能适应复杂的场景.
3. 3. 3. 2 group2序列性能评估 图9 展示了八种算法在序列group2上的精确度和成功率,从定量方面分析,在序列group2 部分遮挡、光照变化、完全遮挡和移出视野等复杂场景中,本文提出的算法均排名第一,精确度分别比STRCF,SRDCF,Au⁃toTrack,DSST,SAMF,LCT 和TLD 提高了0. 618,0. 618,0. 618,0. 618,0. 618,0. 618 和0. 599,成功率分别提高了0. 525,0. 525,0. 525,0. 525,0. 525,0. 525 和0. 512.
图10展示了八种算法在序列group2上的跟踪结果,从定性方面分析,在序列group2第97帧时,TLD 算法跟踪失败,滤波器完全退化,其他算法不受小范围的遮挡影响,依然能跟踪成功. 第120 帧时目标在视野中消失,第149 帧时目标重新出现在视野里,此时目标经历了严重的光照变化,只有本文提出的算法跟踪成功. 第200帧时目标经历了快速运动、光照变化,此时只有本文算法和SAMF算法跟踪成功,但SAMF 算法跟踪状况不佳,精确度不高. 第220 帧时只有本文算法跟踪成功,在经历快速运动和运动形变后的第514帧时,只有本文提出的算法跟踪成功. 在发生光照变化、快速运动和剧烈形变等无人机复杂场景下,本文提出的算法可实现目标的成功跟踪,并且在发生遮挡、丢失目标后可以成功找回目标.
3. 3. 3. 3 person17序列性能评估 图11展示了八种算法在序列person17上的精确度和成功率,从定量方面分析,在场景相对简单的person17序列中,AutoTrack精确度排名第一,精确度为0. 997.本文提出的算法精确度为0. 995,排名第三,与Au⁃toTrack只相差0. 002. STRCF 算法的成功率以0. 968 排名第一,本文提出的算法以0. 960 排名第二,只与STRCF 相差0. 008. 综合精确度和成功率,本文提出的算法在person17序列中表现优秀,在普通的简单场景中跟踪效果依然稳定.
图12展示了八种算法在序列person17上的跟踪结果,从定性方面分析,在序列person17 中大部分算法都能实现稳定和准确地跟踪目标.
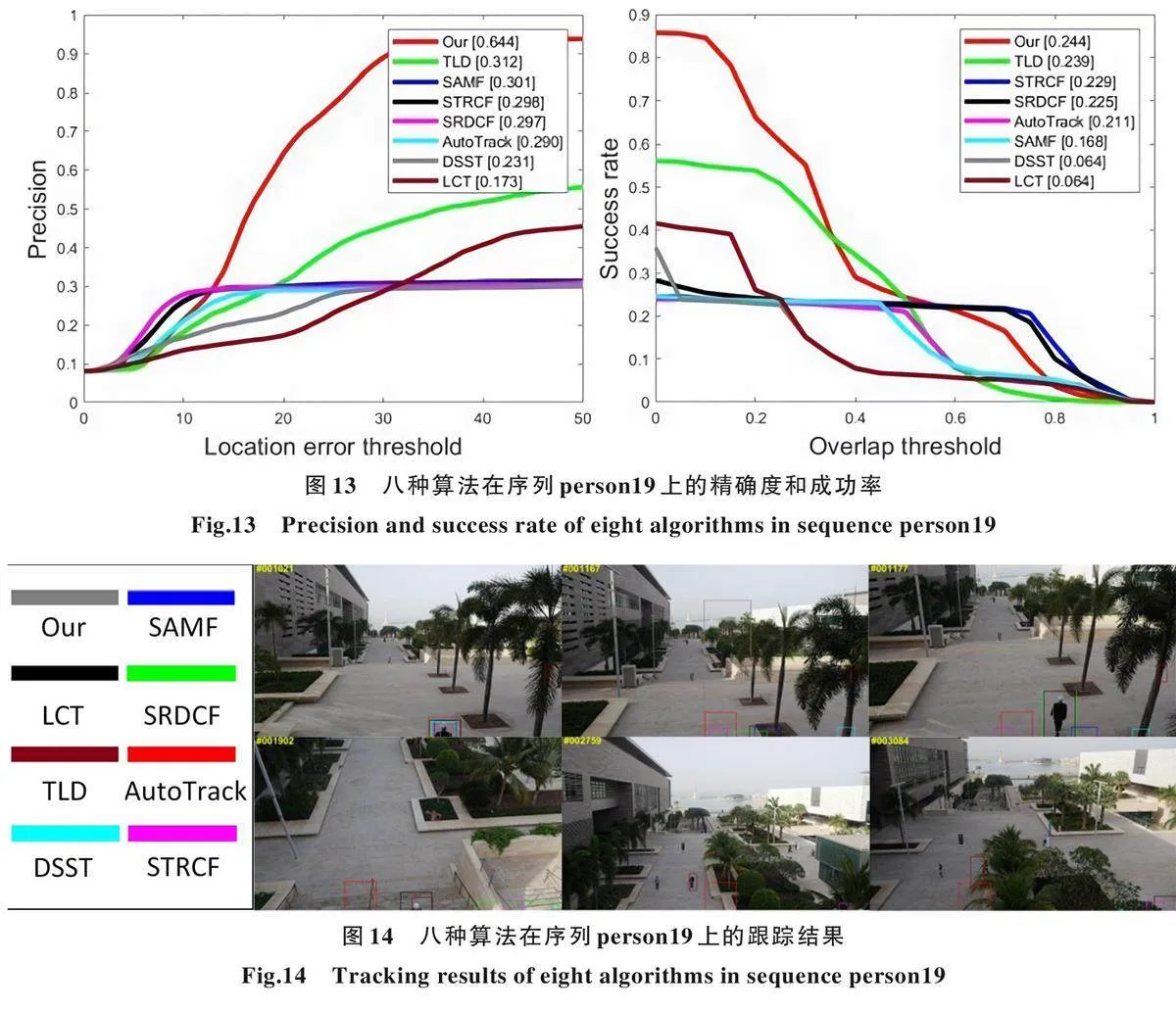
3. 3. 3. 4 person19 序列性能评估 图13为八种算法在序列person19 上的精确度和成功率,从定量方面分析,在序列person19 上本文提出的算法排名第一,比STRCF,SRDCF,AutoTrack,DSST,SAMF,LCT 和TLD精确度分别提高了0. 346,0. 347,0. 354,0. 413,0. 343,0. 471 和0. 332,成功率分别提高了0. 015,0. 019,0. 033,0. 18,0. 076,0. 18 和0. 005.
图14 为八种算法在序列person19上的跟踪结果,从定性方面分析,在序列person19第1021 帧时目标发生了部分遮挡,所有算法都跟踪成功. 目标在第1167帧时消失,第1177帧时重新出现,此时只有LCT,SRDCF和本文提出的算法跟踪成功,其中本文提出的算法跟踪效果最好. 第1902 帧时目标部分消失在视野里,出现部分遮挡,此时只有TLD,LCT和本文提出的算法跟踪成功,其他滤波器均已完全退化. 第1759帧时只有TLD和本文提出的算法跟踪成功. 第3084 帧时出现部分遮挡,只有本文提出的算法稳定地成功跟踪. 结果表明本文提出的算法在经历多次目标在视野中消失后重新出现,仍能稳定地成功跟踪.
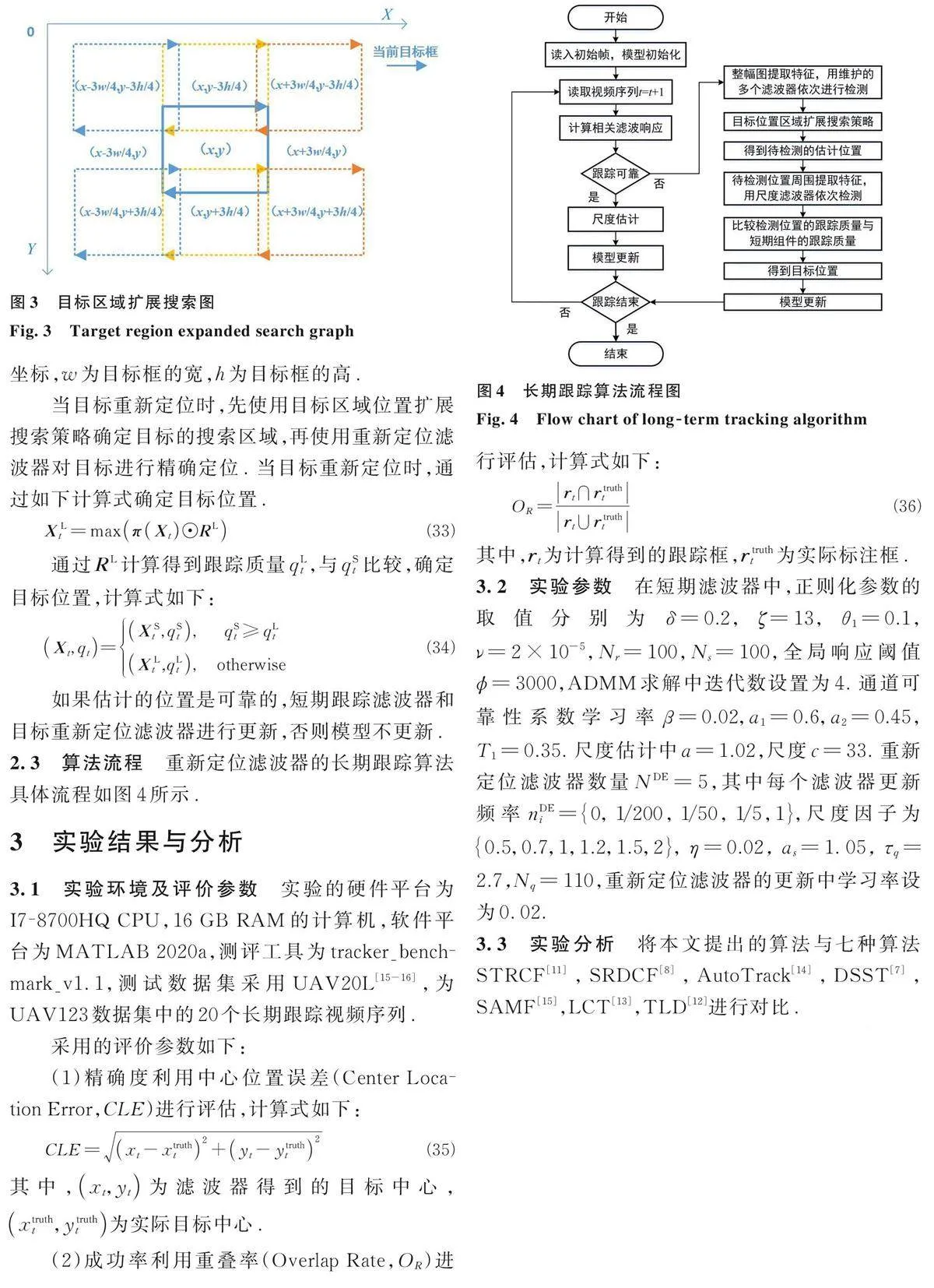
4结论
本文提出一种小型无人机场景下运动目标的相关滤波跟踪算法,从外观融合模型、正则化限制滤波器和目标恢复三个方面进行改进,提升了跟踪精确度,解决了移出视野、遮挡等复杂场景下的跟踪问题. 实验结果表明,本文提出的算法在目标出现光照变化、严重遮挡、快速运动等复杂场景时,跟踪效果稳定,并且具有实时性能. 在工程应用方面仍面临很多复杂情况,未来需要对滤波器模型继续研究.
(责任编辑 高善露)
