基于人工智能算法的田间农机作业无人化管理系统设计
2024-12-31吴晓伟骆庭宝

摘要" 本研究以农田田块为管理对象,设计一套智能化管理系统,以掌握田间农机作业的具体情况,包括作业农机类型、对应农事活动和作业时间等信息。具体而言,以人工智能算法为基础,通过机器视觉方法,自动捕捉并识别田间农机,从而获取准确的田块作业农机类型及其所关联的生产信息。整个系统集成了感知设备、人工智能算法和应用软件平台,其构成简单,环境通用性强,可以为农场的无人化管理提供有效工具,为生产管理模式提供参考。
关键词" 人工智能算法;机器视觉;农业机械识别;农机作业
中图分类号" S24" " " "文献标识码" A" " " "文章编号" 1007-7731(2024)17-0096-05
DOI号" 10.16377/j.cnki.issn1007-7731.2024.17.023
Design of unmanned management system for field agricultural machinery operations based on artificial intelligence algorithms
WU Xiaowei" " LUO Tingbao
(Anhui Zhongke Intelligent Sense Technology Co., Ltd., Wuhu 241000, China)
Abstract" The farmland was taken as management object, and an intelligent management system was designed to grasp the specific situation of agricultural technology operations in the field, including the type of agricultural machinery, corresponding agricultural activities, and operation time. Specifically, based on artificial intelligence algorithms, machine vision methods were used to automatically capture and agricultural machinery were recognized in the field, thereby obtaining accurate types of agricultural machinery for field operations and their associated production information. The entire system integrated sensing devices, artificial intelligence algorithms, and application software platforms, with simple composition and strong environmental universality, which could provide effective tools for unmanned management of farms, and provide references for new production management models.
Keywords" artificial intelligence algorithms; machine vision; agricultural machinery identification; machinery operation
大田农业种植生产过程中,农业机械作业的管理是贯穿种植周期的重要环节之一。智慧农业采用智能化装备和系统,对农业基础设施进行现代化改造,极大提升了农业生产管理的效率。罗锡文等[1]以植物生产为例,介绍了智能农机的智能感知、自动导航、精准作业和智慧管理等功能,分析了集成相关智能农机创建水稻无人农场的实践和无人农场的特点,包括耕种管收生产环节全覆盖、机库田间转移作业全自动、自动避障异况停车保安全、作物生产过程实时全监控和智能决策精准作业全无人化。胡健[2]研究认为,大田农业生产正逐步向自动化、智能化演进。在农业土地大规模、跨区域流转和种植托管模式不断发展的背景下,大田农业种植生产中的农业机械作业成为农业管理的重要一环,如农机的具体作业范围、作业面积、在不同地块的作业时间以及作业效率等,均是生产管理的重要组成部分。孙梦遥等[3]示范推广了集物联网、大数据应用为一体的农机深松整地作业远程监测技术,结合田间试验进行校验,农机作业管理通过为每台农机装配专用传感器和物联网设备,收集农机的具体位置数据,掌握特定农机的作业面积和作业质量。结果表明,该技术为深松整地作业补贴提供了科学量化依据。实践中,由于大量农机跨区域作业,或暂未配置监测设备,种植者难以有效掌握农机在田间的具体作业时间和作业情况。此外,种植者的农田生产种植计划通常以每个地块为单位,单个农机的作业数据很难与具体的农田地块信息相匹配,管理需求有待得到进一步满足,农场的无人化管理有待更新更加匹配的监测技术手段[4]。
本研究以农田地块为管理核心,利用人工智能算法开发了一套农机图像识别技术,使用固定式摄像机作为数据采集工具,实现了田间农机作业的无人化管理。该识别技术能够自动辨识农机的类型,结合系统可以进一步获取农机作业的类型、农事活动的开始和结束时间等信息,并判断这些信息是否与农事计划相符,从而实现高度自动化田间管理。
1 系统架构与业务构成分析
整体系统采用了分层架构策略,分为感知层、平台层和应用层(图1),以优化农业管理流程和提高系统的可维护性。感知层由固定式摄像机组成,摄像机配备了1/1.8、约400万像素的互补金属氧化物半导体(Complementary metal oxide semiconductor,CMOS)图像传感器,并安装于5.5 m高的立杆上,以覆盖农田的监测需求。通过宽带网络,摄像机将捕获的图像数据实时传输至互联网平台,实现与系统软件平台的数据对接。平台层的核心功能为农机识别算法,负责对摄像机视野内的视频图像进行连续识别、处理与数据存储。应用层则面向用户,提供了一套田间农机作业无人化管理软件,为农田种植管理设计并实现监测农机活动、统计农事信息等功能。
2 系统业务实现方案分析
该系统的业务实现分为以下关键步骤。首先,调整田间配置摄像机的角度和视野范围,精确设定摄像机所需监测的农田区域,确保摄像机可以不间断地采集视频数据,实时捕捉目标田块的图像信息。其次,平台层的农机识别算法对所捕获的视频图像进行连续处理和分析。当算法识别出目标对象时,会将识别结果及相关信息(如出现时间、农机类型和摄像机编号等)传递给应用层软件,并继续执行识别分析任务。若未发现目标农机对象,算法将持续进行识别分析。最后,应用层软件根据所接收的农机识别结果及附加信息,自动记录农机进入和离开特定农田区块的时间,并计算目标农机在特定区块的准确作业时长。这与王登辉等[5]利用车载路由器组建播种监测终端和车载计算机之间的局域网,实现对播种数据与导航数据的融合同步,并通过网络连接传输给云平台进行数据存储与实时展示有相似之处。此外,该应用层软件还可根据农机类型的识别结果自动生成相应的农事作业记录,并与农事计划进行自动对照,从而辅助管理人员落实和确认农事计划的执行情况。例如,收获机对应收获作业,插秧机对应插秧作业等。为保证识别时效性,平台层的识别算法会直接读取摄像机视频流数据,并进行动态识别分析,将时间延迟控制在50 ms以内。
3 系统农机识别算法实现分析
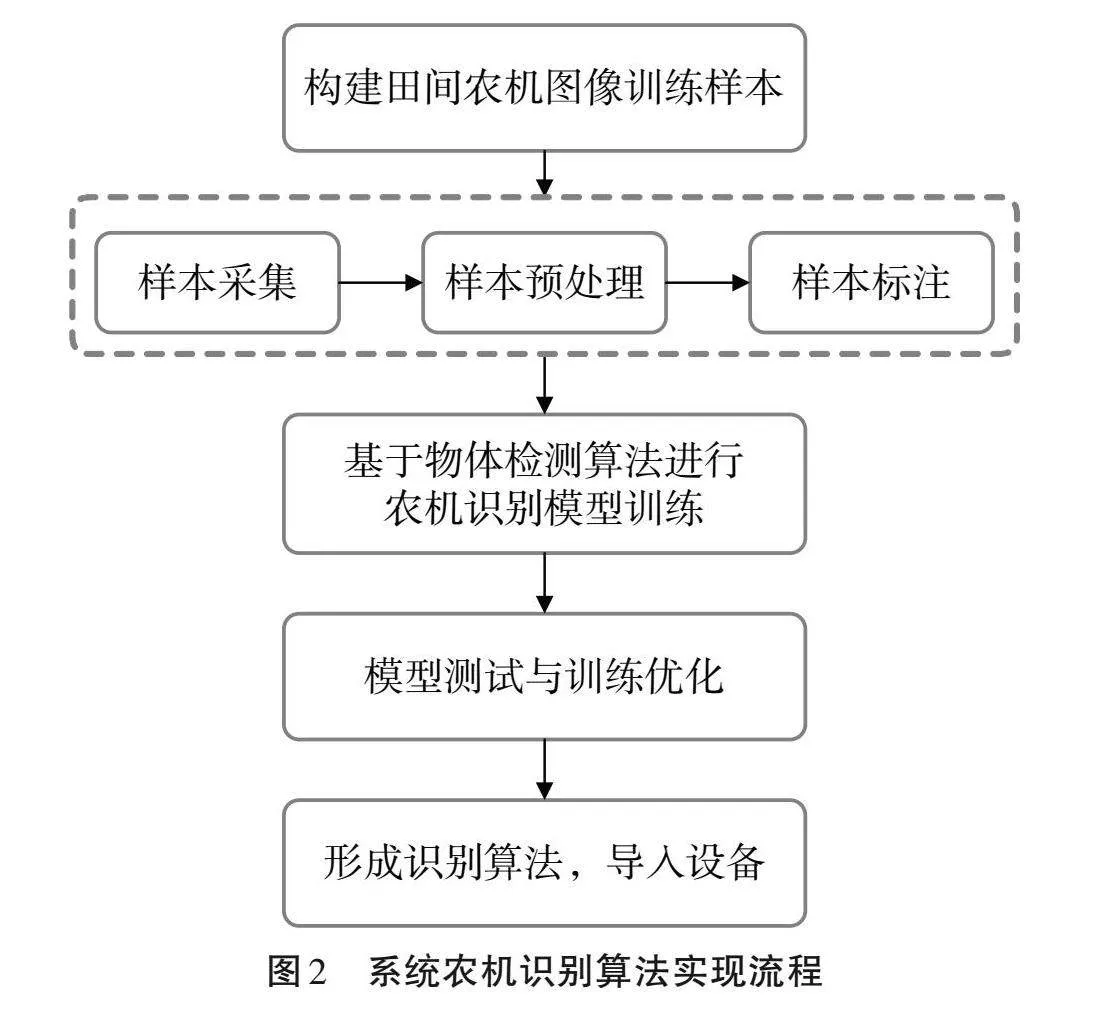
平台层的农机识别技术基于物体检测基础算法[6],旨在实现对特定农机图像的准确识别。为训练农机识别模型,首先,界定目标识别对象为插秧机、拖拉机和收获机3种农机,并将应用场景限定在1.3 hm2以下的农田中。该界定面积是农田的常见规格,适合大多数常用摄像机的清晰视野范围。其次,构建田间农机图像训练样本的数据集,使用样本数据集和物体检测算法进行农机识别模型训练。再次,对训练模型进行测试,并基于测试结果对模型作进一步优化。最后,当满足应用需求的模型完成并通过测试后,将完整的识别算法结合识别模型导入服务器,集成到应用系统中。系统农机识别算法实现流程如图2所示。
3.1 数据集准备
在数据集的构建过程中,主要采用两种方法来收集图像样本。一是直接在农田现场通过安装的摄像机捕捉农机视频图像,并从中提取具有训练价值的静态图像帧;二是使用网络爬虫工具在互联网上搜索实际农机作业场景的图片,特别是拍摄角度与田间摄像机相似的图片。以上两种方法为模型训练提供了丰富有效的图像样本库。
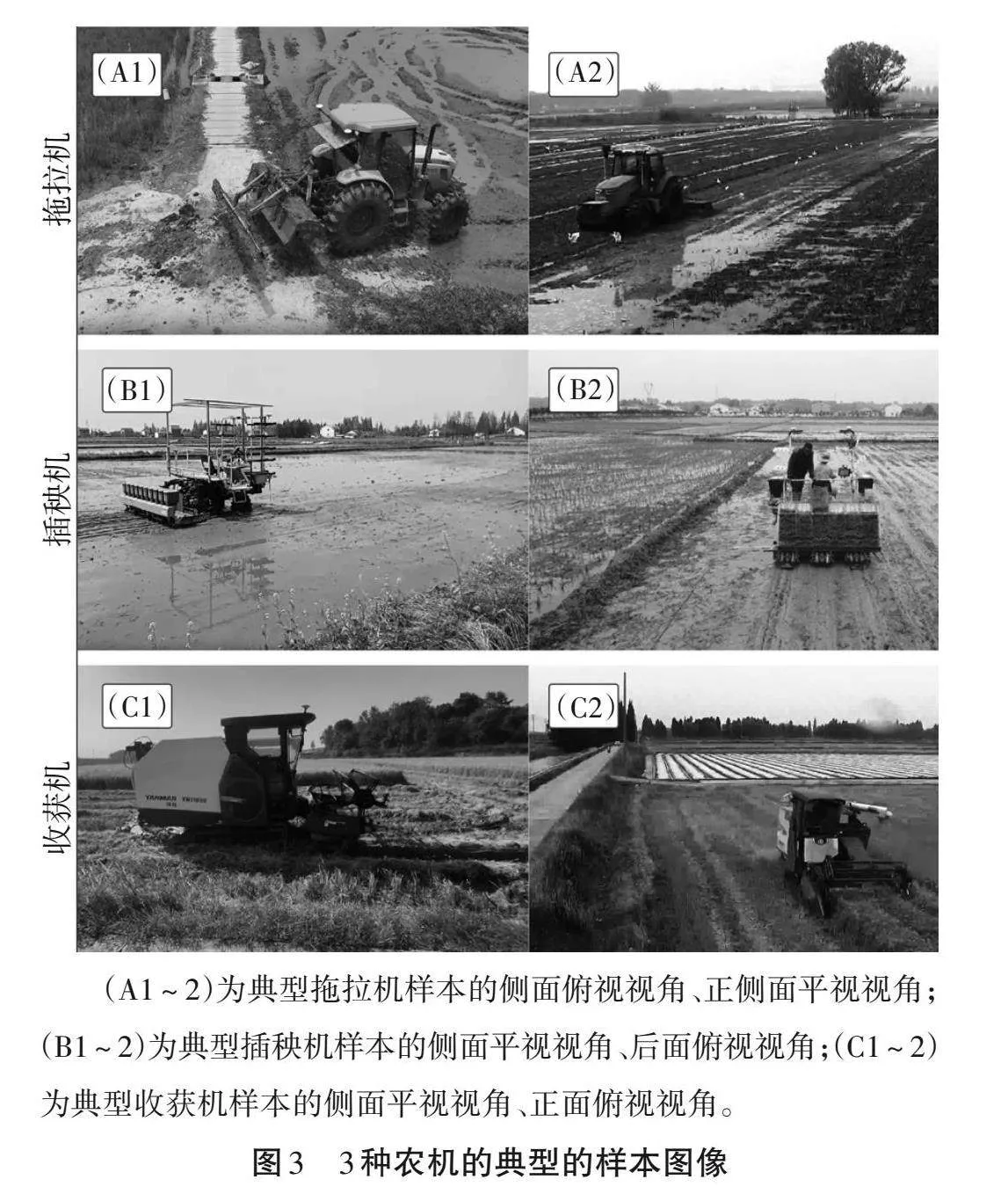
为确保数据集的多样性,在以水稻种植为主的农场进行图像数据的采集。共安装了30套标准摄像机,按照农机距离摄像机0~100和100~200 m的范围,对收集到的图像进行分类。此外,考虑农机在实际作业中可能出现不同的拍摄角度和方向,以及不同时间拍摄导致图像亮度和对比度存在一定差异,在采集图像样本时,专门在不同的时间段(早、中和晚)以及不同的光照条件(顺光、逆光等)下收集多类图像样本。典型的样本图像如图3所示,展示了拖拉机、插秧机和收获机在不同角度、光照度和距离条件下的情况,以确保训练模型的全面性和准确性。
(A1~2)为典型拖拉机样本的侧面俯视视角、正侧面平视视角;(B1~2)为典型插秧机样本的侧面平视视角、后面俯视视角;(C1~2)为典型收获机样本的侧面平视视角、正面俯视视角。
3.2 模型训练与优化
在成功收集大量样本数据后,将原始图像数据进行分类和清洗,以形成适用于算法模型训练的训练数据集及用于后续测试的测试数据集。随后,对训练数据集进行标注,并将标注后的数据集输入算法中进行模型训练。通过训练得到的农机图像识别模型被集成到系统中,使用测试数据集对模型的识别效果进行验证和评估。为全面评估算法性能,在虚拟环境和现场实地均开展测试,检验算法标准测试数据集及通过摄像机实时拍摄的视频图像,并实时动态识别检测性能。算法模型的测试重点关注两个核心指标,分别为通过视频图像发现农机的检出率,以及检出农机后对农机类型识别的正确率。
初步建立的算法模型经实测发现其中存在许多特异化的农机运行场景,这些场景要求对模型进行进一步的数据采集完善和程序优化处理。例如,在水稻种植处于播种、插秧等生育早期阶段,农田中大面积连片水面产生的反光、倒影可能会干扰识别过程;当农作物进入成熟期,生长高度较高时,受摄像机拍摄角度影响,在图像中农作物可能会大范围遮挡农机,导致算法无法准确提取农机特征,从而可能漏检;同一大类农机存在不同款型、样式差异,如水稻收获机有、无封闭驾驶室的区别,喂入量、输运方式等因素的不同而导致外形样式、尺寸和主体结构存在差异。对于上述问题,采取样本数据的进一步扩充和算法优化,以提高算法的识别能力,增强其准确性和适用性,满足农业生产实际中的需求。这与鲍文霞等[7]使用田间采集的作物图像数据集对模型进行预训练,再使用无人机采集的作物图像数据集对模型进行参数更新和优化训练,并在无人机采集的图像数据集上进行试验的做法存在相似之处。
4 算法模型应用效果分析
4.1 识别应用效果
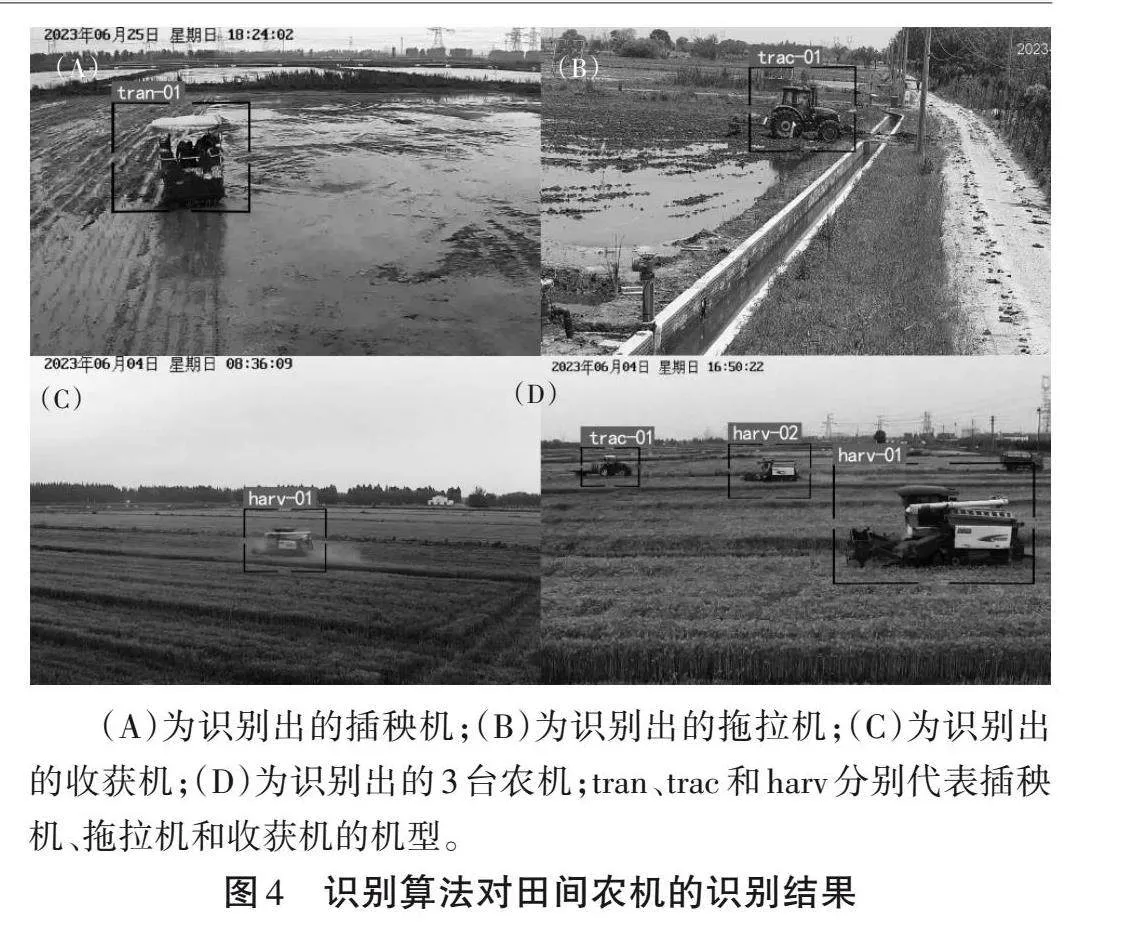
在对所开发的算法模型进行多轮迭代和验证之后,将该模型集成到田间农机作业无人化管理系统中,以评估其实际应用性能。如图4所示,该算法模型能够在图像中准确框选,并标注出所识别的农机类型。图4A展示了插秧机在水田中的识别结果。插秧阶段需要灌溉泡田,存在大面积水面,且插秧机背面朝向摄像机,识别算法在这种复杂状态下亦实现了准确检出和识别。图4B~C分别展示了拖拉机、收获机在田间作业的图像,其中,拖拉机距离摄像机约60 m,收获机距离摄像机约150 m,识别算法对两者均实现了准确检出,并准确判断了农机类型。在图4C中,收获机周围存在明显尘土干扰,且拍摄图像为其侧后方,算法模型亦做出了准确识别,体现了其良好的抗干扰能力。图4D展示了同时出现3台农机(2台收获机和1台拖拉机)的情况,较近的收获机距离摄像机约40 m,较远的收获机和拖拉机距离摄像机均超过100 m。该算法模型不仅成功检出了所有农机,还准确识别了其各自的类型,证明具备高效的多目标检测能力。值得指出的是,图4D中远处的拖拉机距离较远且在图像边缘,成像尺寸较小,该算法模型依旧准确检出并识别了农机类型,展现了其在小目标检测方面的优秀性能。
4.2 算法模型评估
该算法模型主要从所拍摄的农机图像识别检出率和检出后两个维度来评估识别算法对农机类型的识别正确率。为全面评定所开发算法的性能,选取每种机型各400张图像进行分析,这些图像中农机与摄像机的距离分布在0~100和100~200 m,每个范围各选取200张。
插秧机、拖拉机和收获机3种农机在不同距离范围内的识别检出率均较高,在0~100 m范围内,各机型的检出率均超过85%,其中,拖拉机和收获机的检出率超过了90%;在100~200 m范围内,拖拉机和收获机的检出率保持在85%以上,插秧机检出率较低,为71%。
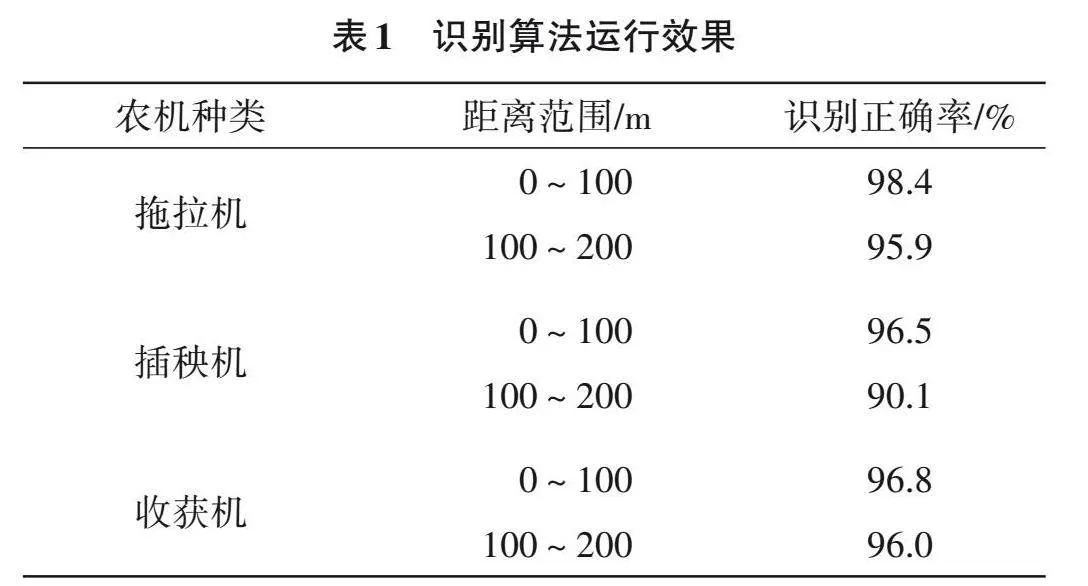
进一步对检出的农机识别正确率进行分析,再次考察该算法模型对已检出农机的测试图像所判断的农机类型正确与否。具体统计数据如表1所示,结果显示,在0~100 m范围内,3种农机的识别正确率均超过95%;在100~200 m范围内,3种农机的识别正确率均超过90%,其中插秧机的识别正确率相对较低,为90.1%。这一结果与插秧机较低的识别检出率呈现一致性。
综合分析上述识别检出率和识别正确率的数据发现,插秧机总体指标相比拖拉机和收获机偏低,原因可能是插秧机的体积较小,且机体上部外观结构大多为细框架,导致其在远距离识别时易与背景融合,被算法模型遗漏。
基于测试情况,拖拉机等3种农机在0~100 m范围内,均具备了较高的准确度;在100~200 m范围内,识别拖拉机、收获机的准确度较高,对插秧机的识别尚需进一步完善才能具备较好的实用性。不同距离范围内的识别检出率和识别正确率测试结果表明,所开发的算法模型能够有效支持无人化监测。
4.3 整体系统应用效果
本研究开发的整体系统集成了田间安装的摄像机实时监测农机作业,实现了迅速识别农机类型的核心功能。所开发的算法模型不仅在单一目标检测上表现出色,在复杂环境下的多目标检测和小目标检测方面也具有强大的应用能力和高度的检测准确性。基于识别结果,系统软件应用实现了记录各农田地块中农机作业的起止时间,进而根据农机类型推断农事活动种类等功能,并自动生成和记录农事活动。这不仅提高了农机作业监测的实时性和准确性,而且通过自动化数据处理,优化了农场管理流程。这与王伟康等[8]利用无人系统采集多光谱影像,通过人工神经网络算法融合光谱和纹理信息,有效提升了监测精度具有一定的相似之处。
5 结语
本研究设计了一套基于人工智能算法的无人化农机作业管理系统,该系统利用视觉图像识别技术,实现了对田间农机作业情况的自动化监测与管理。通过专门针对拖拉机、插秧机和收获机3种主要农机类型的图像识别算法模型,无需人工干预,依赖机器视觉技术,可准确识别农机类型,并掌握关联作业的相关信息。基于目前的设计成果,后续工作将围绕3个主要方向进行:一是参考石欣等[9]的研究,进一步完善算法与摄像机设备的配合,提高远距离、小尺寸农机,特别是类似插秧机的识别检出率和识别正确率;二是参考Cheng等[10]的研究,扩展可识别的农机种类,包括自走式喷杆喷雾机、打捆机等;三是加强算法对农机携带或拖挂农机具的识别能力,以便通过农机具的识别更准确地判断当前的农事活动,例如,通过拖拉机携带的农机具,判断拖拉机正在从事耕地或者施肥工作。
该系统的应用降低了人工管理成本,提高了管理效率和质量,实现了农田管理的连续性和自动化,可以作为无人化农场运营管理体系建设的一个有效组成部分,为无人化农场的发展提供新的技术手段和管理工具。
参考文献
[1] 罗锡文,廖娟,胡炼,等. 我国智能农机的研究进展与无人农场的实践[J]. 华南农业大学学报,2021,42(6):8-17.
[2] 胡健. 浅谈数字技术赋能农业高质量发展[J]. 安徽农学通报,2022,28(8):152-154.
[3] 孙梦遥,徐岚俊,宫少俊,等. 农机深松整地作业远程监控技术示范应用与效果评价[J]. 农业工程,2021,11(12):30-34.
[4] XU J P,ZHAO W X,WEI C Y,et al. A model for recognizing farming behaviors of plantation workers[J]. Computers and electronics in agriculture,2022,202:107395.
[5] 王登辉,卢邦,李强,等. 油菜直播机组无人播种作业远程监测系统设计[J]. 华中农业大学学报,2023,42(3):260-270.
[6] SHENG J J,SUN Y Q,HUANG H,et al. HBRNet:boundary enhancement segmentation network for cropland extraction in high-resolution remote sensing images[J]. Agriculture,2022,12(8):1284.
[7] 鲍文霞,谢文杰,胡根生,等. 基于TPH-YOLO的无人机图像麦穗计数方法[J]. 农业工程学报,2023,39(1):155-161.
[8] 王伟康,张嘉懿,汪慧,等. 基于固定翼无人机多光谱影像的水稻长势关键指标无损监测[J]. 中国农业科学,2023,56(21):4175-4191.
[9] 石欣,卢灏,秦鹏杰,等. 一种远距离行人小目标检测方法[J]. 仪器仪表学报,2022,43(5):136-146.
[10] CHENG G,YUAN X,YAO X W,et al. Towards large-scale small object detection:survey and benchmarks[J]. IEEE transactions on pattern analysis and machine intelligence,2023,45(11):13467-13488.
(责任编辑:杨欢)