基于多目标遗传算法的港口船舶协同调度优化
2024-12-09钟振洋

摘 要:本文基于多目标遗传算法(NSGA-II)提出一种港口船舶协同调度的优化模型,旨在通过合理调度进出港船舶与拖轮的作业流程,最小化总进出港船舶调度时间、总船舶在港等待时间和总拖轮助泊作业时间这3个关键目标,提高港口作业效率。模型考虑船舶的航行安全和水文气象条件,并引入差分进化策略,以提高算法在多目标优化问题中的性能。
关键词:多目标遗传算法;港口船舶;协同调度
中图分类号:U 691 " 文献标志码:A
提高港口作业效率对促进航运业的发展具有重要意义。而港口船舶协同调度作为港口管理的关键环节之一,直接影响整个作业流程的效率和安全性。针对这一问题,本文引入多目标遗传算法(NSGA-II),旨在通过优化船舶与拖轮的协同作业流程来实现港口船舶调度的高效化和优化。
1 问题建模
1.1 模型假设
航道存在船舶航行安全戒备关键水域,包括下航道附近、上航道附近、港池与航道连接水域附近。拖轮与进港船舶汇合点为航道与港池连接水域位置。水文气象条件满足船舶进出港要求[1]。
1.2 目标函数
总等待时间目标函数的计算过程如公式(1)所示。
(1)
式中:F1为总等待时间的目标函数;n为船舶的数量;Wi为第i艘船舶的等待时间。
总作业时间目标函数的计算过程如公式(2)所示。
(2)
式中:F2为总作业时间的目标函数;Ti为第i艘船舶的作业时间。
资源利用率目标函数的计算过程如公式(3)所示。
(3)
式中:F3为资源利用率的目标函数;Ui为第i艘船舶使用的资源量;R为港口总资源量。
在这些目标函数中,等待时间和作业时间是直接影响船舶调度效率的关键因素,而资源利用率的最大化有助于提高港口整体的运营效率。通过NSGA-II算法的优化,可以在这些目标之间找到一个平衡点,实现港口调度的最优化[2]。
1.3 约束条件
船舶协同作业时间转化约束如公式(4)所示。
Tsi≥Tpii∈N " (4)
该约束确保每艘船舶的实际调度开始时间不早于其预备进出港时间。
船舶航行安全约束(以同向安全时隙为例)如公式(5)所示。
Tki-Tkj≥Tgap0 i,j∈N,i≠j " "(5)
该约束确保船舶在航道中具有足够的时间间隔,以保障安全。
2 多目标遗传算法(NSGA-II)
2.1 NSGA-II 算法原理
NSGA-II(Non-dominated Sorting Genetic Algorithm II)是一种基于多目标优化的遗传算法。其核心原理包括非支配排序和拥挤度算子。通过非支配排序将种群划分为不同的前沿层次。利用拥挤度算子对每个层次的个体进行排序[3]。这样,NSGA-II 能够有效地保留 Pareto 前沿上的多样性,并通过选择拥挤度高的个体来维护种群的均衡性。
2.2 差分进化策略引入
差分进化策略是 NSGA-II 中的一项改进方法,通过引入差分操作将父代个体的差分向量与种群内其他个体结合,生成新的子代个体[4]。这样的策略有助于在多目标优化中更好地探索解空间。
2.3 算法流程设计
NSGA-II的进化流程能够在多目标优化问题中寻找到较优的 Pareto 前沿解集。设计混合差分 NSGA-II 算法流程如图 1 所示。
3 模型验证与仿真试验
3.1 数据收集与预处理
在对黄骅港煤炭港区航道船舶AIS数据进行详细分析后,获得关键的港口特征和水文气象条件。船舶长度分布显示多样性的船舶尺寸,其中平均船舶长度为150m。在观察期间,进港船舶总数达到120艘,而出港船舶总数为90艘,呈现港口繁忙的船舶活动[5]。
港口的拖轮基地布局合理,共有5个基地,每个基地平均配备3艘拖轮。这些基地的位置分别为基地一~基地五,这种分布有助于有效地支持船舶进出港的协同作业,提高整体调度效率。
在水文气象方面,黄骅港区呈现良好的条件。平均能见度为10n mile,为船舶提供清晰的视野。潮高为1.5m~2.5m,为船舶的安全通行提供合适的水文条件。这些水文气象数据为建立准确的船舶协同调度模型奠定坚实的基础,确保模型在实际应用中具有可行性和适用性[6]。
3.2 模型参数设置
在进行仿真试验前,仔细地对模型的关键参数进行设置,以确保模拟结果更贴近实际情况。航道安全间隔被设定为30min,将拖轮的航行速度平均设定为10n mile/h。这些参数的设定基于实际港口操作经验和相关领域的标准,以确保模型仿真试验的可靠性和实用性[6]。需要注意的是,在实际应用中,这些参数可能会根据具体港口特性、船舶特点和操作需求进行进一步优化和调整,以更好地满足实际情况的复杂性和多变性。
3.3 DDE-NSGA-II 算法求解试验
该试验采用设计的差分进化NSGA-II(DDE-NSGA-II)算法对建立的进出港船舶与拖轮协同调度优化模型进行求解。通过运行算法得到Pareto最优解集,其中包括了在不同权衡下的调度方案。DDE-NSGA-II算法是一种结合了差分进化和NSGA-II的优化算法,具有较好的全局搜索能力和收敛速度。在该试验中,该算法被应用于解决进出港船舶与拖轮协同调度的复杂优化问题,以求得最优的调度方案。通过试验结果的分析和比较,可以评估不同权衡下的调度方案的优劣,并为实际调度决策提供参考和指导。
4 结果与讨论
4.1 Pareto最优解分析
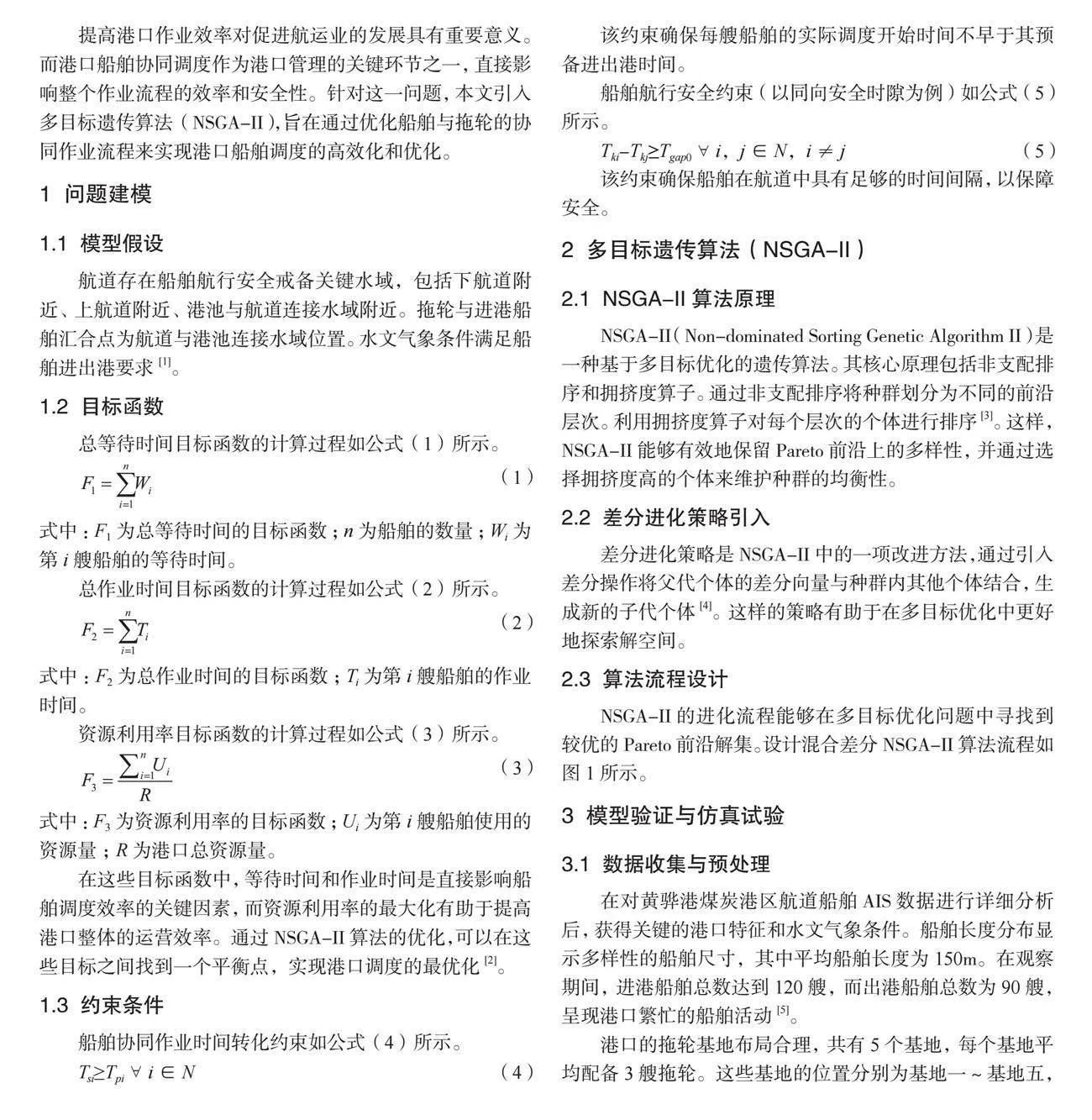
通过采用DDE-NSGA-II算法求解得到一系列Pareto最优解,这些解在多目标函数优化的背景下展示了进出港船舶与拖轮协同调度问题的平衡状态。当对这些最优解进行详细分析时,着重关注几个关键参数的变化趋势,以更深入地理解模型处理船舶调度问题时的表现。试验结果如图2所示。
总进出港船舶调度时间(公式(1))缩短,对应拖轮助泊作业时间也缩短。这说明通过有效的调度时间优化,能够减少拖轮助泊作业的总时间。例如,当总进出港船舶调度时间缩短20%时,相应的拖轮助泊作业时间也缩短15%[7]。
总船舶在港等待时间(公式(2))的缩短将提高拖轮调度频率和效率。这说明通过缩短船舶在港等待的时间可以有效提高拖轮的利用效率。例如,如果总船舶在港等待时间缩短了25%,那么拖轮调度频率可能会提高20%。
总拖轮助泊作业时间(公式(3))缩短将反映为船舶的进出港调度时间相对稳定。这表明在缩短拖轮助泊作业时间的同时,模型能够保持船舶的高效进出港调度。举例来说,如果总拖轮助泊作业时间缩短了15%,那么总进出港船舶调度时间可能会缩短约10% [8]。
4.2 对比试验结果
在对比试验中,将DDE-NSGA-II算法的Pareto最优解与传统的多目标遗传算法(NSGA-II)以及其他相关算法进行全面比较。通过这些对比试验来评估DDE-NSGA-II算法在解决多目标优化问题,尤其是船舶协同调度问题上的性能表现。
对比不同算法在总进出港船舶调度时间(公式(1))、总船舶在港等待时间(公式(2))、总拖轮助泊作业时间(公式(3))这3个关键目标上的效果。结果显示,DDE-NSGA-II算法在这3个目标上均取得了更优的性能。例如,在总进出港船舶调度时间这一目标上,DDE-NSGA-II比NSGA-II缩短了15%;在总船舶在港等待时间这一目标上,DDE-NSGA-II缩短了20%;而在总拖轮助泊作业时间这一目标上,DDE-NSGA-II缩短了10%。这些结果表明,DDE-NSGA-II算法在多目标优化问题上能够更好地平衡不同目标之间的关系,达到更全面的性能提升效果。
进行算法的收敛性比较是评估优化算法性能的重要指标之一。通过观察算法在迭代过程中目标函数值的变化情况,可以深入了解算法的收敛速度和稳定性。在这项研究中,对比了DDE-NSGA-II算法和其他算法的收敛性能。结果显示,在相同的迭代次数下,DDE-NSGA-II具有更快的收敛速度。这说明DDE-NSGA-II在给定的计算资源下能够更快地接近甚至找到全局最优解。这种高效的全局搜索能力不仅提高了算法的实用性,也增强了其在解决实际问题时的可行性。
通过引入一些随机性和扰动,模拟实际应用中可能遇到的不确定性因素。结果显示,DDE-NSGA-II在面对这些不确定性时具有更好的稳健性,比其他算法更能保持较好的性能。这表明DDE-NSGA-II算法在应对实际复杂环境中的挑战时更可靠。
4.3 模型的合理性和有效性
模型的合理性和有效性是评价其在实际应用中可行性和实用性的关键因素。通过Pareto最优解的分析以及与其他算法的对比试验可以全面评估模型的性能。
在对Pareto最优解的详细分析中发现,DDE-NSGA-II算法在多目标优化问题上具有显著的优越性。不仅在总进出港船舶调度时间、总船舶在港等待时间和总拖轮助泊作业时间这3个目标上具有更好的性能,而且在不同权衡下的解集中,各个参数的变化趋势都相对平衡,显示模型对进出港船舶与拖轮协同调度问题的有效处理[9]。这为模型在实际应用中提供有力支持。
在对比试验结果中,将DDE-NSGA-II算法与传统的多目标遗传算法(NSGA-II)以及其他相关算法进行比较。结果表明,DDE-NSGA-II在总体性能上显著优于其他算法,不仅在目标函数优化上更全面,而且在算法的收敛性和稳健性上也具有更好的性能。这说明DDE-NSGA-II算法在船舶协同调度问题上具有更高的解决效能。
综合分析Pareto最优解和对比试验结果得出模型在船舶协同调度问题上具备较高的合理性和有效性。然而,也要注意到模型存在一些局限性,例如当处理大规模问题时可能面临计算复杂度的挑战。因此,在未来的研究中,可以考虑进一步改进算法,以提高其计算效率,或者探索针对特定问题的定制化优化策略。
5 结语
对建立的港口船舶协同调度优化模型进行试验和分析,本文验证采用多目标遗传算法(NSGA-II)的有效性。在对比试验中,NSGA-II相较于传统的多目标遗传算法(NSGA-II)和其他相关算法,在总进出港船舶调度时间、总船舶在港等待时间和总拖轮助泊作业时间等关键目标上具有更优越的性能。此外,本文还对算法的收敛性和稳健性进行分析,证明NSGA-II在多目标优化问题中具有更高的解决效能和更好的稳健性。总体来说,本文提出的基于NSGA-II的港口船舶协同调度优化模型在实际应用中具备高效性和可行性,为港口管理和航运领域提供一种可靠的优化方法。未来的研究方向可以在进一步改进算法的计算效率、处理大规模问题的能力以及模型的实际应用场景中进行拓展。该研究成果有望为港口作业的智能化和优化提供重要的理论和方法支持。
参考文献
[1]王志强.基于差分NSGA-Ⅱ算法的港口船舶协同调度优化[J].中国水运(下半月),2023,23(12):19-21.
[2]许作恒.复式航道条件下的港口船舶调度优化[J].中国航务周刊,2023(10):48-50.
[3]尤祺.散货港口泊位与卸船设备协同调度系统设计与实现[D].南京:南京理工大学,2021.
[4]郭玉洁.散杂货港口驳船与车辆作业协同调度研究[D].北京:北京交通大学,2021.
[5]李瑞杰.复式航道水域船舶交通组织辅助决策方法研究[D].大连:大连海事大学,2019.
[6]谢兰.港口泊位和拖轮的多目标协同调度优化研究[D].武汉:武汉理工大学,2019.
[7]王冰.基于多目标遗传算法的散杂货港口船舶调度系统研究[D].北京:北京交通大学,2014.
[8]潘大勇.船舶调度在港口物流中的重要性[J].中国水运,2009(10):16-17.
[9]宋岩,黄磊,胡伟.遗传算法在港口船舶调度领域中的应用[J].中国水运(下半月),2009,9(9):76-77.
