喷涂机器人正压防爆系统设计及试验验证
2024-12-06陈青储徐烽



摘 要:在喷涂机器人工作过程中,如果内部的电气元件产生的火花或静电接触到油漆挥发的可燃性气体,就会有爆炸风险。为了提高喷涂机器人的安全性,本文在现有机器人机械结构和防爆原理的基础上,采用正压型防爆方法,对喷涂机器人正压防爆系统进行设计,具体包括正压防爆气路系统设计与控制系统设计。经过调试和性能试验,验证了该系统能够有效达到喷涂机器人的正压防爆效果,提高机器人的工作安全性。
关键词:喷涂机器人;正压防爆;系统设计
中图分类号:TP 242" " " " 文献标志码:A
随着现代科技的不断发展,工业自动化水平也日渐提升,工业机器人在各个领域得到广泛应用,其中喷涂机器人主要应用于产品表面涂装作业。由于喷涂机器人的工作环境通常是密闭的喷涂房间,因此在喷涂机器人工作过程中,若腔体内部的电气元件产生的火花、静电接触到油漆挥发的可燃性气体,将会引发爆炸[1]。因此,为了保障喷涂过程中的安全,喷涂机器人必须具有防爆性能。防爆设计有本安型、隔爆型和正压型等形式[2],与其他类型的防爆技术相比,正压型防爆对机械强度要求低,且在相同体积下正压外壳质量轻[3],因此在喷涂机器人领域运用最广泛且技术最成熟的防爆方法是正压型防爆。此次研究设计了一种喷涂机器人正压防爆系统,能够有效提高喷涂机器人工作过程的安全性和可靠性。
1 正压防爆喷涂机器人的结构特点
正压防爆喷涂机器人结构示意图如图1所示,正压防爆喷涂机器人本体主要由底座部分、转座部分、大臂部分、小臂部分、手腕部分等部件组成。其进气口设置在底座的侧面,出气口设置在小臂顶端电机座腔体的侧面。机器人本体各关节由伺服电机驱动,伺服电机分别安装在转座腔体和小臂顶端的电机座腔体中,各关节相互配合以调整机器人末端在空间中的位置和姿态。
2 喷涂机器人正压防爆系统设计
2.1 功能需求分析
根据喷涂机器人的结构特点及工作环境,工业机器人正压防爆系统主要有以下功能。1)清扫换气:在机器人本体启动前,向正压腔体内充入保护性气体(纯净空气),将正压腔体内原有的爆炸性气体排出,保证在较短的时间内,将爆炸性气体的浓度降至安全值以下。2)正压维持:机器人正压腔体内的压力应维持在一定范围内,在机器人本体工作过程中,实时监测正压腔体内压力大小。当检测到压力小于设定下限值时,向正压腔体内充气补压,直至压力达到设定上限值。3)安全泄压:在机器人本体工作过程中,若正压腔体内压力过大,将腔体内的气体释放泄压,保证内部压力不会过高而导致正压腔体内零件损坏。4)故障报警:在机器人本体工作过程中,如果机器人可能发生严重泄漏或者气源供气故障,正压腔体内压力小于安全值,就立即对机器人本体进行断电并报警提示。
2.2 正压防爆气路系统设计
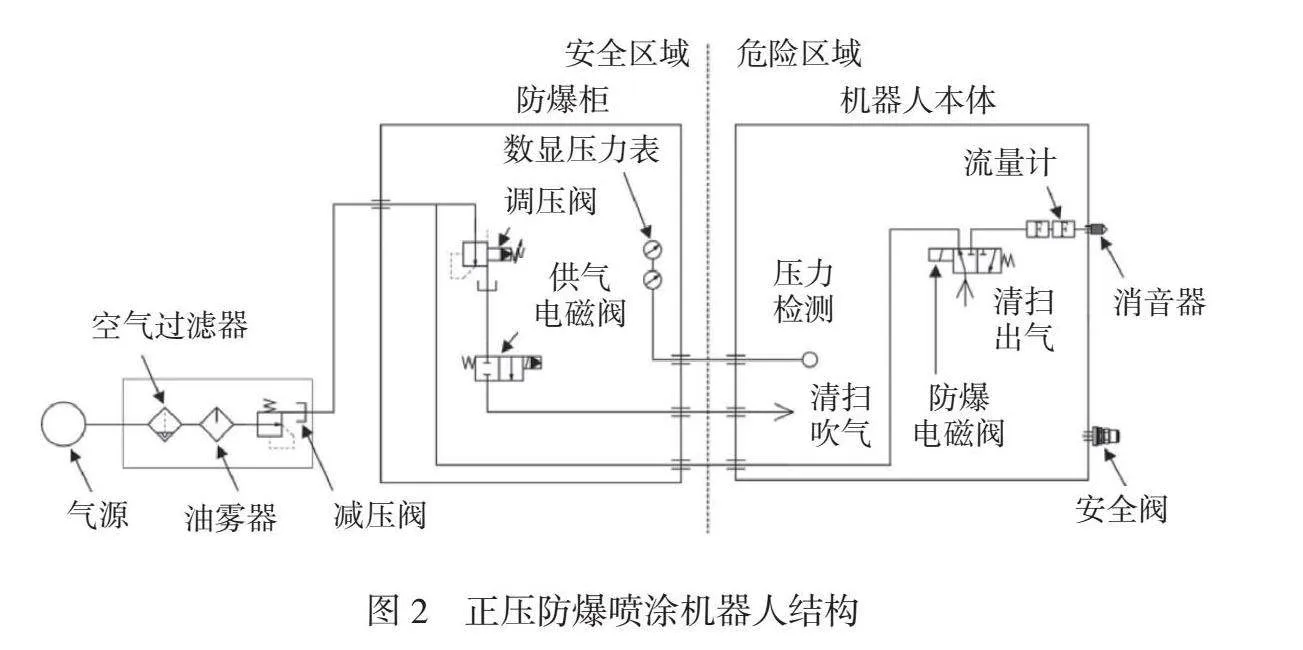
正压防爆喷涂机器人的工作区域分为安全区域和危险区域,安全区域为放置防爆柜的非易燃易爆环境,危险区域为安装有机器人本体的工作间。在机器人工作过程中,正压防爆气路系统供给纯净空气,维持机器人腔体内的正压状态,并对腔体内的压力进行监测,系统主要包括气源、调压阀、供气电磁阀、防爆电磁阀、安全阀、数显压力表等。正压防爆喷涂机器人结构如图2所示。
在工业机器人正压防爆气路系统中,气源管路上安装有空气过滤器、油雾器和减压阀,由空气压缩机提供气源,空气过滤器和油雾器用来过滤杂质和水分,提供纯净的压缩空气,延长正压防爆系统中各零部件的使用寿命。采用减压阀对输入的气体进行压力调节,避免空气压缩机直接充入气压,提高供气的可靠性。
在防爆柜内部安装调压阀、供气电磁阀和数显压力表,调压阀安装在气动三联件的后面,用来调节进气压力的大小。供气电磁阀的输入端与调压阀相连,通过气动导管与机器人正压腔体连通输出端,用来向腔体内通入保护性气体。通过气动导管与机器人正压腔体连通数显压力表,实时监测腔体内的气压大小,为了保证压力监测的可靠性,数显压力表采用冗余设计。
在机器人本体内部安装防爆电磁阀,防爆电磁阀的输入端与腔体内相通,通过排气管与腔体外连通输出端。在排气管上安装流量计,用来检测防爆系统对机器人腔体清扫换气时的进气量,为了提高流量检测的可靠性,流量计采用冗余设计。在排气管的末端,即出气口处安装消音器,用来消除排气时产生的噪声。在机器人腔体壁面上安装安全阀,若腔体内的压力过大,则触发安全阀打开泄压,避免内部压力过大导致腔体内的零件损坏[4]。
2.3 正压防爆控制系统设计
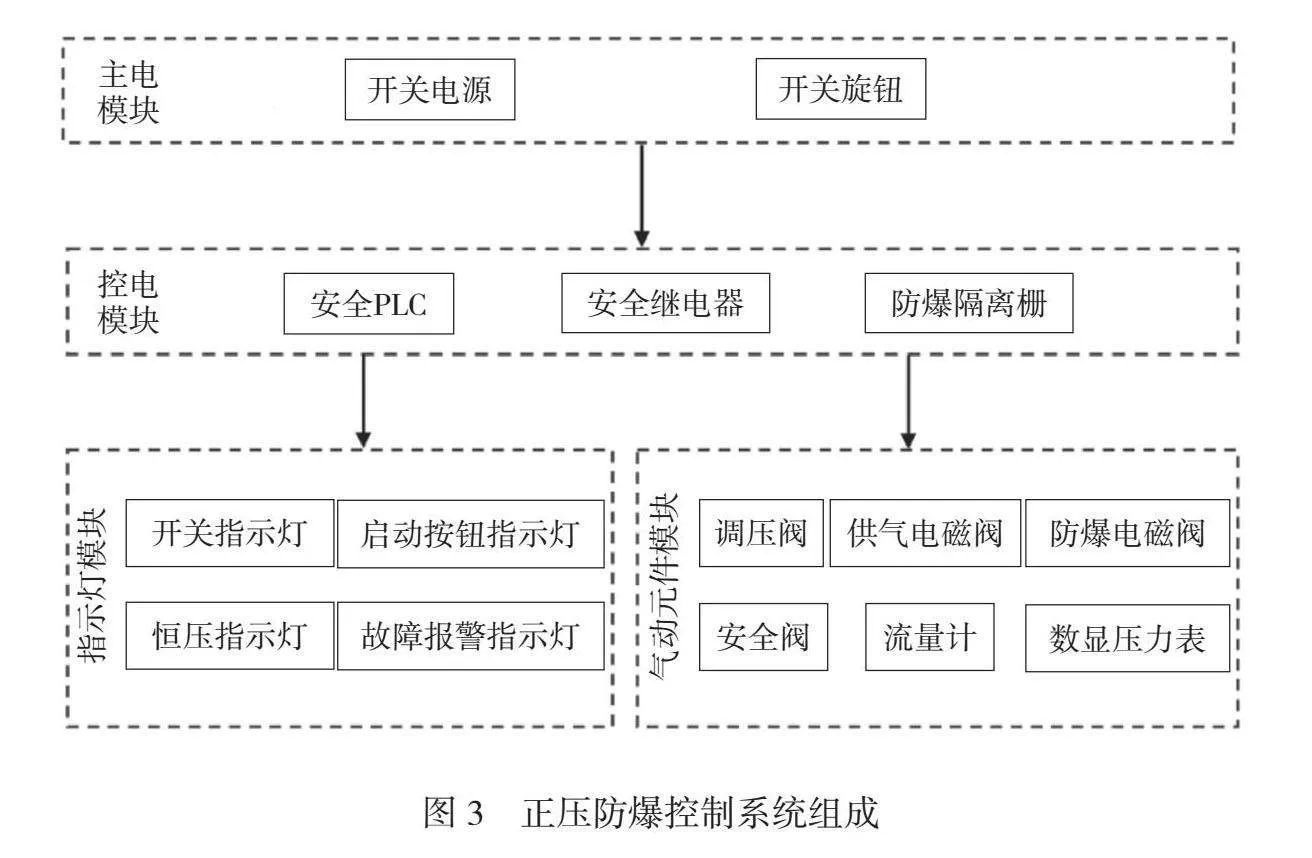
在正压防爆气路系统的基础上,进行控制系统相关设计,其示意图如图3所示。正压防爆控制系统由主电模块、控电模块、指示灯模块和气动元件模块组成[5]。
主电模块:包括电源及开关,主要为正压防爆系统中的元器件提供电源。
控电模块:包括安全PLC、安全继电器和防爆隔离栅。将控电模块作为正压防爆系统的“大脑”,对各个模块起到协调作用,控电模块接收各个模块反馈的信息并进行有效决策和处理,然后控制正压防爆系统中元器件的工作状态和电路通断。
指示灯模块:包括开关指示灯、启动按钮指示灯、恒压指示灯和故障报警指示灯,主要用来显示正压防爆系统的工作状态。
气动元件模块:即正压防爆气路系统,用来实时监测机器人腔体内的压力大小以及进出气状态,并反馈到控电模块进行控制调整。
2.4 正压防爆系统的工作流程
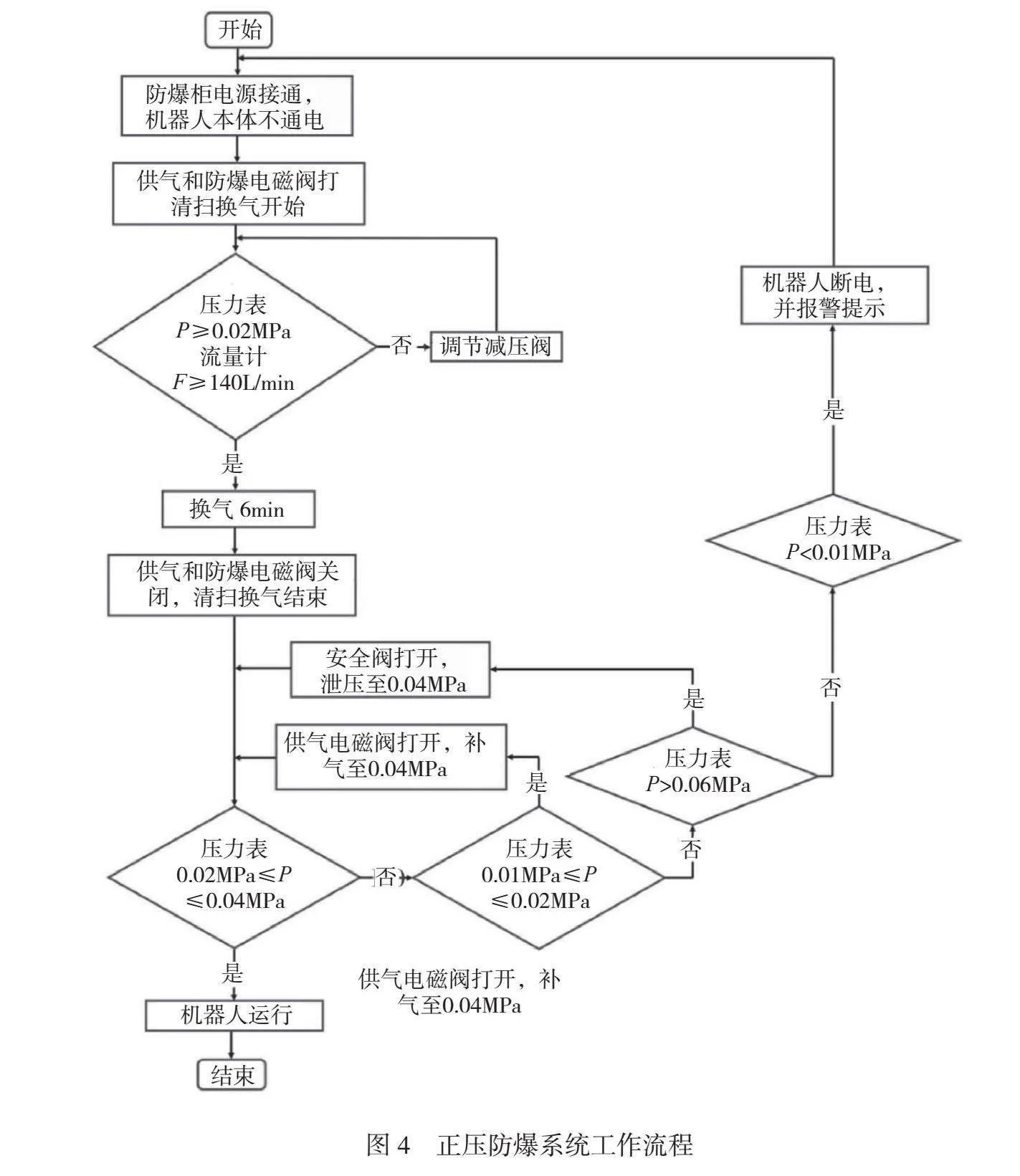
基于前述的正压防爆系统设计方案,该系统的工作流程图如图4所示。在喷涂机器人工作期间,系统存在清扫换气、正压维持、安全阀泄压和故障报警4种工作状态。
清扫换气:在机器人开始工作前,启动防爆控制柜,打开供气电磁阀和防爆电磁阀,向机器人正压腔体内充入纯净空气,将原有的爆炸性气体排出。在清扫换气过程中,气体压力要高于0.02MPa,气体流量要大于140L/min,清扫换气计时6min,关闭供气电磁阀和防爆电磁阀,清扫换气工作完成。
正压维持:清扫换气完成后,机器人本体通电,开始运动进行作业。在机器人工作的过程中,正压腔体内压力维持在0.02MPa~0.04MPa,当检测到压力小于0.02MPa时,打开供气电磁阀,向机器人正压腔体内进行补气至0.04MPa。
安全阀泄压:在机器人工作的过程中,若正压腔体内压力大于0.06MPa,则打开安全阀,泄压至0.04MPa时停止。
故障报警:在机器人正常工作过程中,当正压腔体内的压力降至0.02MPa时,打开供气电磁阀进行补气,腔体内的压力仍然持续下降,降至0.01MPa以下,此时机器人可能发生严重泄漏或者气源供气故障,应立即对机器人本体进行断电并报警提示,停机检查,排除故障后重新启动正压防爆系统。
3 试验验证
3.1 试验平台搭建
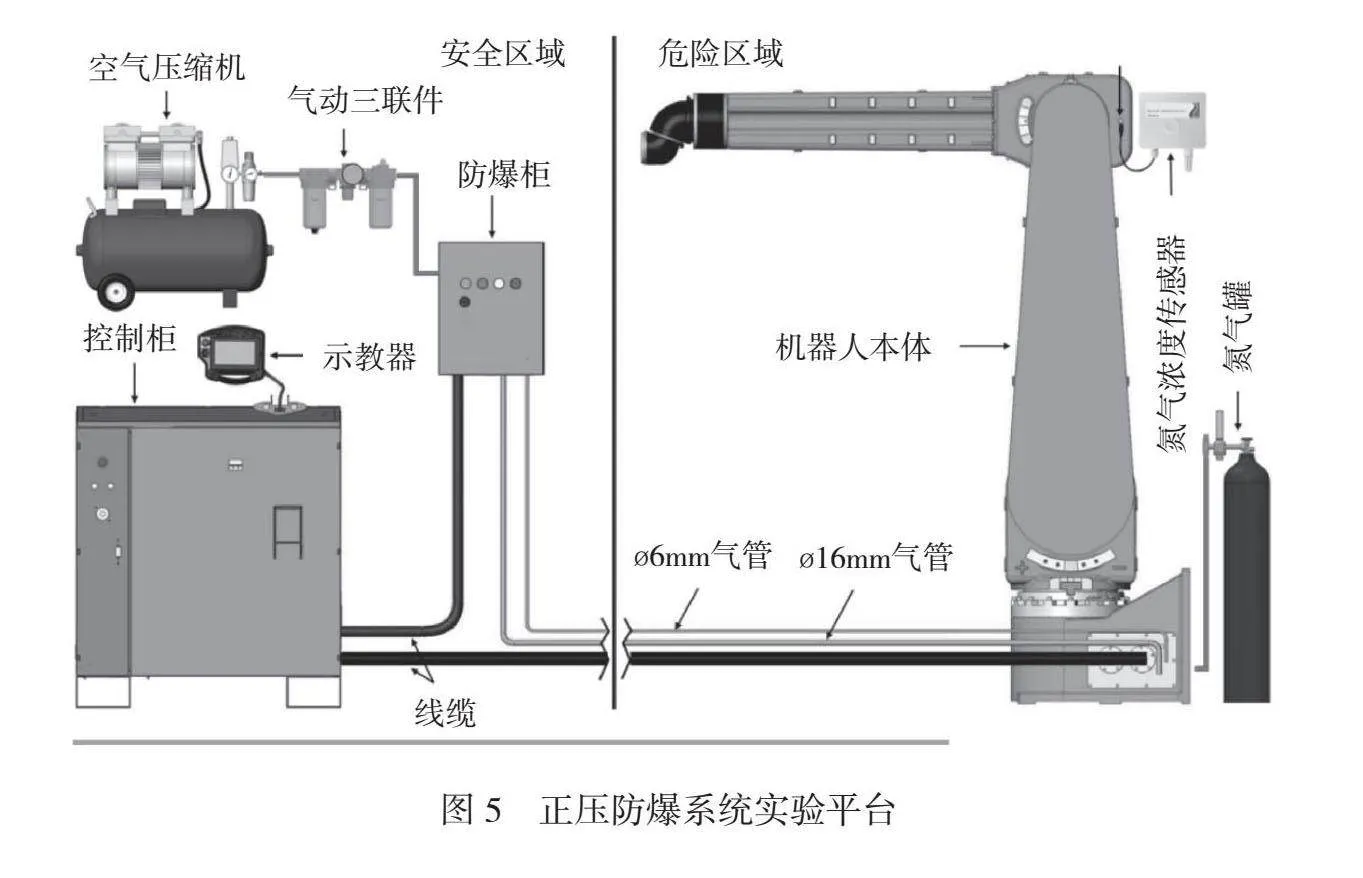
为了验证正压防爆系统的实用性,以某款正压型防爆喷涂机器人为例,设计并搭建了试验平台,正压防爆系统试验平台如图5所示。试验平台主要包括控制柜、防爆柜、机器人本体、空气压缩机、气动三联件、氦气瓶、氦气浓度传感器、气管等。其中防爆柜中安装调压阀、供气电磁阀和数显压力表。ø16mm的气管的一端与调压阀和进气电磁阀相连,另一端与机器人腔体相连,用来向机器人腔体内提供纯净空气,ø6mm的气管的一端与与数显压力表相连,另一端与机器人腔体相连,用来检测机器人腔体内的压力。氦气浓度传感器探头安装在机器人出气口处,用来检测从出气口排出气流的氦气浓度值。
3.2 清扫换气试验
根据国家标准,选用氦气代替爆炸性气体进行清扫换气试验,当试验开始时,将氦气浓度传感器探头安装在机器人出气口处,从机器人进气口向腔体内充入氦气,当氦气浓度传感器显示浓度高于75%时,立即停止充入氦气,使用空气压缩机提供纯净空气进行清扫换气试验,当氦气浓度传感器显示浓度低于1%时,试验完成。在试验过程中,须实时记录从出气口排出的气流中氦气浓度值的变化情况,如图6所示,机器人正压防爆系统完成清扫换气工作第一次试验用时102s,第二次试验用时110s。
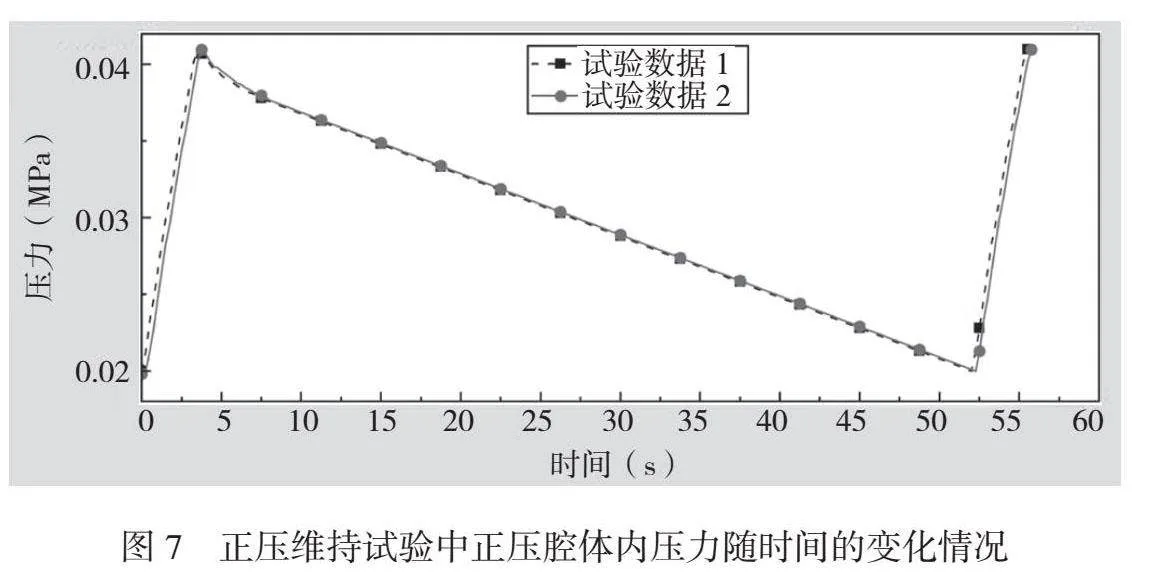
3.3 正压维持试验
清扫换气工作完成,机器人本体开始通电,在机器人工作过程中,实时记录正压腔体内压力随时间的变化情况,如图7所示。机器人正压腔体内的压力基本维持在0.02MPa~0.04MPa,腔体内压力从0.04MPa降至0.02MPa两次试验均用时48.5s。当正压腔体内压力小于0.02MPa时,打开供气电磁阀,向腔体内进行补气至0.04MPa,补气第一次试验用时3.75s,第二次试验用时3.5s。
3.4 安全阀泄压试验
调节调压阀,以0.1MPa的压力向机器人正压腔体内充入气体,当腔体内压力大于0.06MPa时,触发安全阀打开泄压,将压力降至0.04MPa时安全阀关闭,正压腔体内压力随时间的变化情况如图8所示,腔体内压力从0.06MPa降至0.04MPa,用时约3.5s。
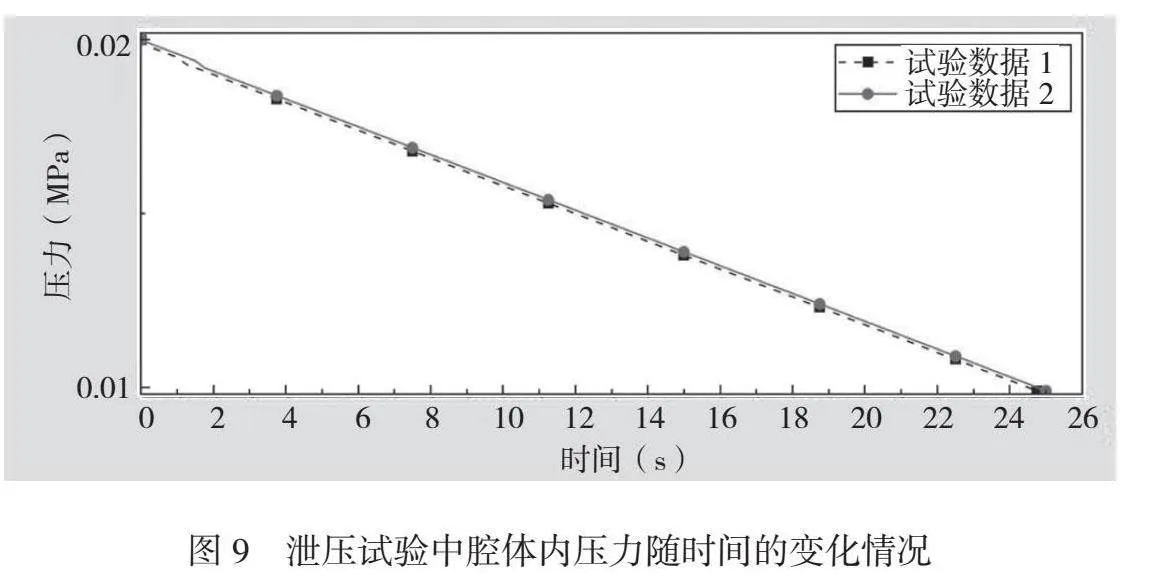
3.5 故障报警试验
在机器人工作过程中,关闭气源,空气压缩机停止向机器人腔体内供气,腔体内压力逐渐下降,当压力降到0.01MPa时,机器人本体断电,故障指示灯亮起报警。在试验过程中,腔体内压力随时间的变化情况如图9所示,腔体内压力从0.02MPa降至0.01MPa,第一次试验用时24.75s,第二次试验用时25s。
4 结论
本文设计了一款结构简单,安全性高,能够根据机器人正压腔体内的压力变化而进行自动调节的喷涂机器人正压防爆系统。此正压防爆系统采用清扫换气、正压维持、安全阀泄压和故障报警相结合的方法,保证了机器人密封腔内的正压环境,防止爆炸性气体接触到腔体内的电气设备。经过调试和试验验证,此正压防爆系统能够达到预期的效果,达到喷涂机器人正压防爆的目的。
参考文献
[1]聂勇刚.喷涂机器人防爆系统设计与动力学分析[D].南昌:南昌航空大学,2012.
[2]李世光,黄莹,封昌盛.喷涂机器人防爆设计及检验方法研究[J].电气防爆,2019(2):41-45.
[3]郗艳梅,石岩,岳红新.煤矿危险气体探测机器人结构和防爆设计[J].煤炭技术,2016,35(9):260-261.
[4]蒋立军,翟莹莹,郝磊,等.一种正压机器人防爆系统及其控制方法:CN107229250A[P].2017-10-03.
[5]曹仁俊,方钰,高国栋,等.一种喷涂机器人防爆柜电控系统及其控制方法:CN111413920A[P].2020-07-14.
