用于水质动态监测的渔业养殖管家机器人
2024-11-05李佳萍宋妍霏李思远王宇轩马少华


摘 要:在渔业养殖过程中存在着水体温度不适宜、浑浊度过高等导致水产产量下降的问题,而传统人工检测具有局限性。为实现对水下养殖环境中水体温度和浑浊度的实时监测,设计了一种以水质动态监测为主要功能的渔业养殖管家机器人,并进行实验室环境下的实验验证。同时,设计了仿鲈鱼结构,以提高机器人的浮力和抗压能力。实验结果表明,渔业养殖管家机器人能够准确检测水体温度及浑浊度,检测准确率达98%。此外,该机器人也为实验室环境下的水质检测等需求提供了思路。
关键词:渔业养殖;管家机器人;自主循迹;水体温度;浑浊度
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2024)16-0168-05
Fishery Aquaculture Housekeeping Robot for Dynamic Water Quality Monitoring
Abstract: In the process of fishery aquaculture, there are problems such as unsuitable water temperature, excessive turbidity and so on, which lead to the decline of aquatic production, while the traditional manual detection has limitations. In order to realize the real-time monitoring of water temperature and turbidity in the underwater aquaculture environment, a fishery aquaculture housekeeping robot with the dynamic monitoring of water quality as its main function has been designed and experimentally verified in the laboratory environment. Meanwhile, a perch-like structure is designed to improve the buoyancy and pressure resistance of the robot. The experiments show that the fishery aquaculture housekeeping robot can accurately detect the temperature and turbidity of the water body, and the detection accuracy reaches 98%. In addition, the robot also provides ideas for water quality testing in laboratory environments and other needs.
Keywords: fishery aquaculture; housekeeping robot; autonomous traction; water temperature; turbidity
0 引 言
中国水产品产量连续33年稳居世界第一,且近年来,产业规模和消费量总体呈现快速增长趋势。但是存在着水体温度不适宜、藻类过度繁殖导致浑浊度过高等问题对渔业的健康发展构成了威胁。为了保持良好的养殖环境,养殖人员需要定期对水体情况进行检查,但目前的人工检测方法费时费力且不够精确。因此,智能化水质检测就成了行业亟须解决的问题。通过引入智能化技术,可以实现对水质的实时监测和分析,从而提高养殖效率、降低成本,并有效预防可能的水质问题。这将为中国渔业的可持续发展和国际竞争力提供重要支持。
渔业养殖水体常规检测项目包含pH酸碱度、溶解氧、温度、浑浊度等多个重要指标,这些参数直接影响着水产养殖的健康和发展。国内目前用于水产养殖的水质检测仪器大多采用离线式实验室检测方式,需要取样后进行检测,并且检测结果反馈周期长,难以及时有效地保证水产养殖的安全性。水下机器人具有作业范围更广,实时性更强,效率更高等诸多优点,可以满足在水下环境中进行智能化水质监测和检测的要求。通过搭载相应传感器和设备,实现对水体各项指标的快速、准确监测,从而为养殖人员提供及时的数据支持和预警信息。在未来,水下机器人有望成为工业化智能化渔业养殖中不可或缺的设备,为提升养殖效率、保障养殖安全做出重要贡献。
目前水下机器人研究蓬勃发展,对于水下机器人的运动控制系统,仿生学设计等方面研究逐渐深入,但针对渔业养殖水质检测方面的水下机器人研究仍然很少。针对渔业养殖管家机器人现实应用需要,我们设计了一款能够在水下稳定运行,实时检测水质状况,并对异常数据及时发出警报的渔业养殖管家机器人。
1 整体方案设计
根据渔业养殖水质监测需求,机器人工作过程中需全程自主巡检,并且能够完成前进、转弯、上浮、下沉等功能,以确保机器人在水下环境灵活移动,覆盖养殖区域的各个角落;同时需要能够实时监测水质数据和鱼类健康状况,将数据传输至上位机并对异常数据发出警报。
根据机器人设计要求,综合考虑实际应用需要,完成渔业养殖管家机器人整体设计。机械主体部分根据仿生学原理,设计仿鲈鱼外形减小水阻力,三组推进器与尾部协同配合实现前进、转弯浮沉等功能;主控模块主要由STM32F407ZGT6主控芯片及主控板、锂电池等组成,可实时监测各传感器的反馈数据,并对其进行逻辑运算。检测模块集成了TDS传感器、温度传感器等设备实现水质数据动态监测,及时获取环境信息。
2 机器人外形设计
2.1 主舱设计
水下机器人外形多种多样,综合考虑机器人应用场景、下降深度、有效载荷、水下环境和任务需求,机械主体不仅要有足够的空间安装控制电路和检测设备,还需要有足够的抗压性,应该选择合适的材料来满足支撑强度和可靠的密封性。同时,机械主体是浮力的主要提供者,因此排水量应尽可能大,为了尽量减少水流对机器人的阻力,主舱表面应尽量光滑简洁。
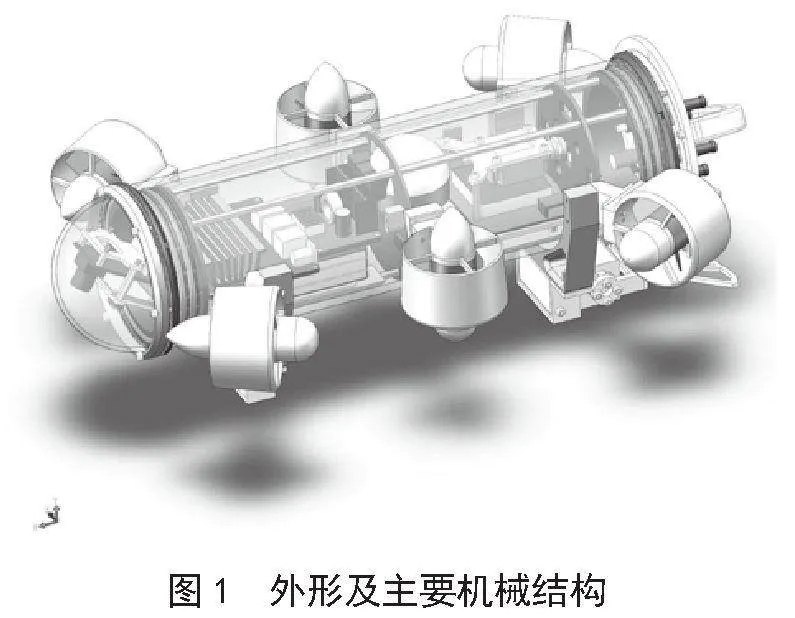
机器人机械主体如图1所示,模仿鲈鱼结构,中间是圆柱壳,前部以半球壳结束。半球壳中安装摄像头及其他电子仪器,视野开阔,能够提高机器人抗压能力和防水性。
由于水下机器人的工作环境复杂,机器人在水中挤压变形,当水压升高超出材料强度范围,主舱变形过大失去对称性。因此,主舱的设计应保证强度和稳定,受力仿真如图2所示。
2.2 动力计算
水下机器人所受总阻力是沿运动方向作用的合力可表示为:
其中,Ct为机器人本体的总阻力系数,一般取值范围为3.5×103~4.9×103;ρ为海水密度为1.026×103 kg/m3;v、S为机器人的速度和湿面积。
图2 机器人受力仿真
1)摩擦阻力Rf通常基于电脑软件来计算。对于摩擦表面粗糙度增加的阻力,我们使用粗糙度补贴系数(∆Cf),∆Cf=(0.3-0.5)×10-3,取∆Cf=0.000 4。
实验结果表明,摩擦阻力与粘度、线性量有关,可以写成近似公式:
2)制波阻力Rw潜水的时候深度大于机器人长度的1/3可忽略。
3)粘性压差阻力Re通常采用以下近似公式计算:
计算公式总结如下:
计算水下机器人的阻力,运动时机器人湿面积S=0.37 m2,速度v=0.4 m/s
L为物体的线性量,当海水温度为15 ℃时,γ=1.188 31×10-6 m2/s,所以:
Ce=0.8是通过经验值得到的,因此我们可以得到总阻力:
考虑机器人线路产生的附加阻力,取20%作为附加系数。因此,总阻力为:
因此,水下机器人在速度为0.4 m/s时的最小功率P为:
选择的推进器最大功率为300 w,考虑到传递过程中的能量损失,取70%作为转移效率:
因此,机器人的动力系统能够满足要求。
3 控制电路设计
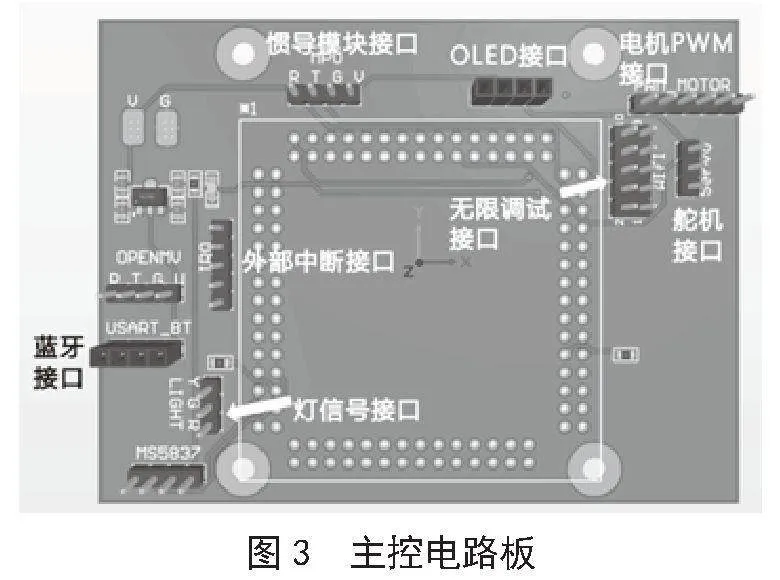
设计的主控电路板包括主控芯片部分、3.3 V稳压电路和外设接口电路,如图3所示。
主控芯片部分采用STM32F407ZGT6是一款微控制器单元,基于高性能ARM®Cortex®-M432位RISC内核,工作频率高达168 MHz。拥有14个定时器、4个通信接口、3个SPI通信接口、3个IIC通信接口和114个GPIO可以满足机器鱼对各种功能的需求。如图4所示,采用STM32F407ZGT6核心板,可直接插到板子上,减少了焊接芯片时带来的不良影响,方便更换母版。
3.3 V稳压电路采用HT7333稳压芯片,此芯片使用CMOS技术开发的低压差,高精度输出电压,可使主控芯片工作稳定。
4 水质数据监测功能设计
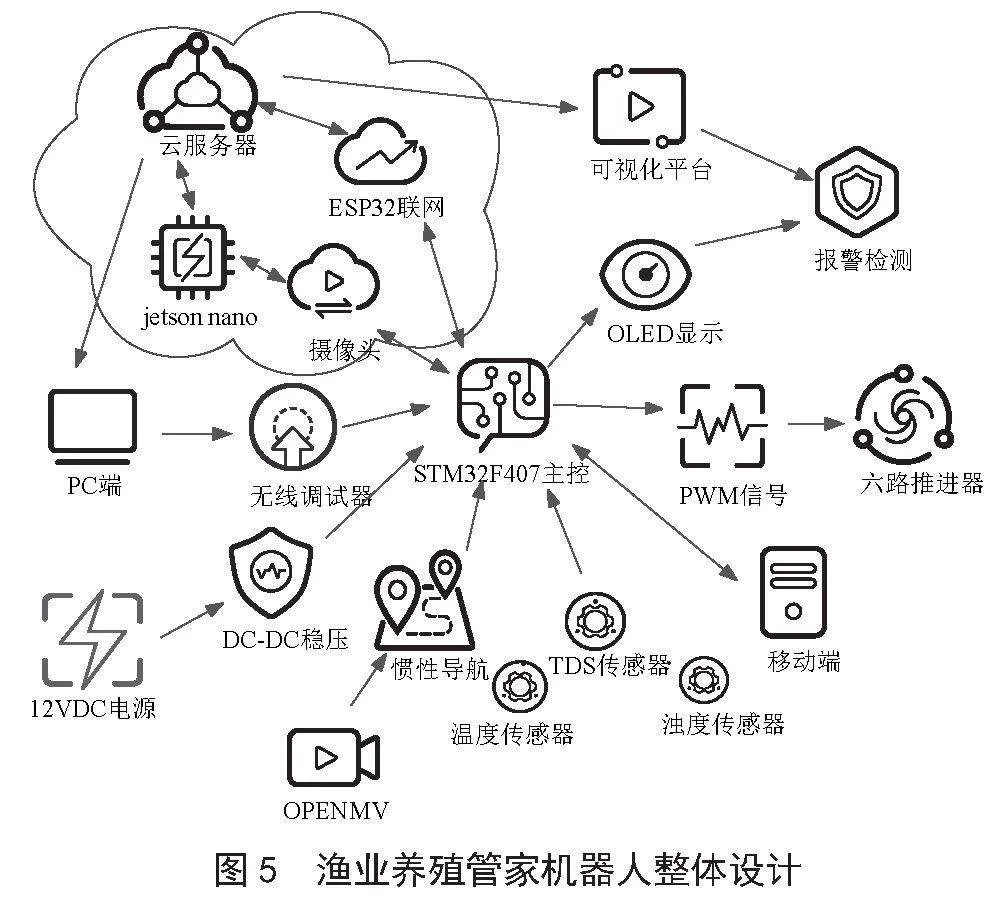
针对渔业养殖管家机器人需要实现的水质数据监测功能,在机器人上加装浊度传感器,以实现对水的洁净度进行监测。同时加装温度传感器用于监测水温,防止水温超出养殖适用范围,确保养殖环境的稳定性和适宜性。
机器人整体设计如图5所示。
4.1 TDS传感器
TDS(Total Dissolved Solids),即总溶解固体,表明1升水中溶有溶解性固体含量。该模块能够做到即插即用,使用3.3~3.5 V宽电压供电,0~2.3 V模拟信号输出。可以非常方便地接入现成的控制系统中使用,将数据传输给控制系统,进行长时间的在线监测。该模块使用防水探头,可长期浸入水中测量,满足渔业养殖管家机器人长期水质检测的功能要求。
TDS传感器模块的组成如图12所示。VCC、GND分别与5 V供电电压正负极相接;T口与DS18B20温度传感器信号线相接;通过2PinXH-2.54接头与TDS探针进行连接。
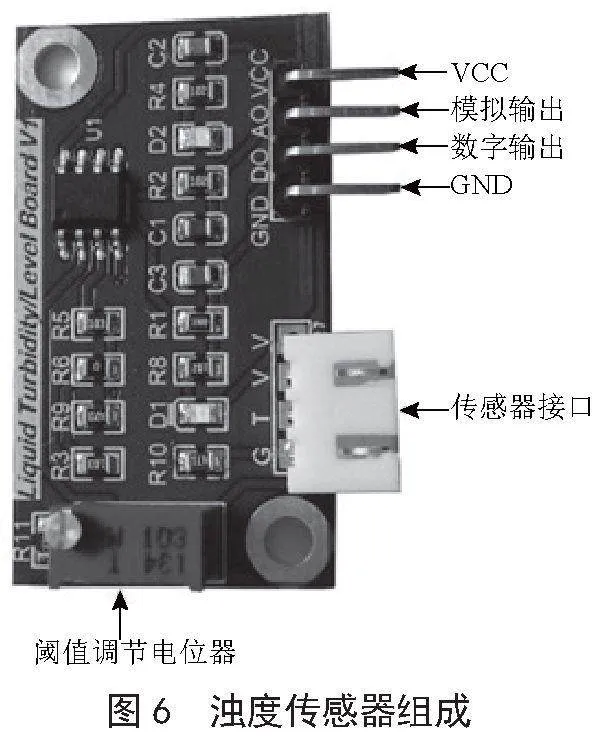
4.2 浊度传感器
浊度传感器模块具有模拟量和数字量输出接口,模拟量可通过单片机AD转换器进行采样处理,以获知当前水的浑浊度。浊度传感器组成如图6所示,AO、DO接口分别作为模拟信号和数字信号输出;接口与浊度传感器进行连接。
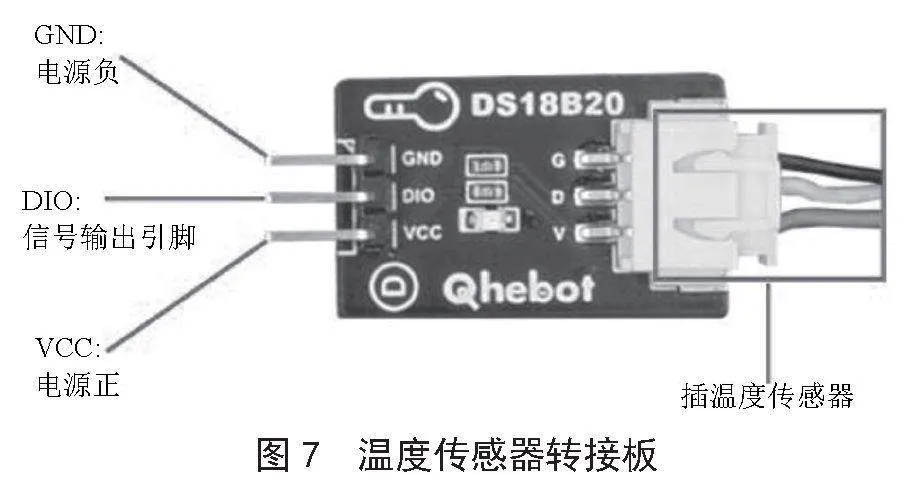
4.3 温度传感器
渔业养殖管家机器人的水体温度检测功能使用的是DS18B20单总线数字温度计。DS18B20数字温度计提供9位温度读数,指示器件的温度信息经过单线接口出入,以数字信号的形式控制命令和数据输入输出。与模拟温度传感器相比,具有功能强大、硬件简单、易拓展、抗干扰性强等特点。DS18B20通过转接板与单片机相连,连接方式如图7所示。
5 水中模拟实验
为了验证渔业养殖管家机器人水质检测功能的有效性,制作机器人样机并搭建模拟养殖场景实验平台。场地为长方体水池,尺寸为3 000 mm×2 000 mm×600 mm,水面高度650 mm。
5.1 实验过程
在充足光照下进行实验,浑浊度及温度检测步骤如下。
5.1.1 浑浊度检测实验步骤
1)在水池中灌入适量的清洁水,保证水面高度达到650 mm,要求初始水质适合鱼类生存。
2)将机器人放置在水池边缘的出发区,并启动机器人的水质检测功能。
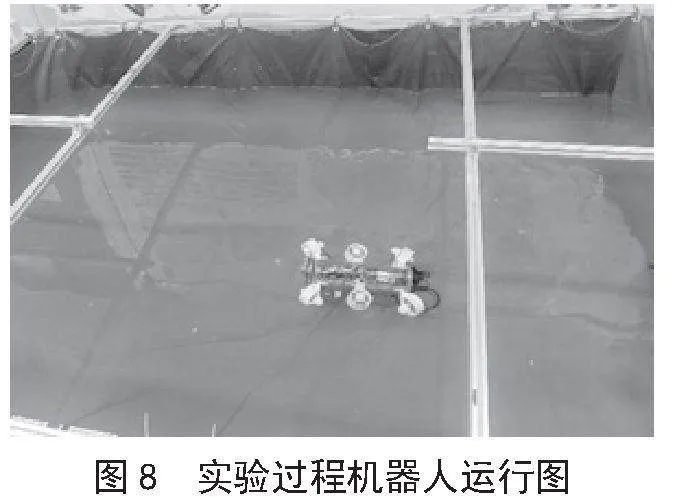
3)为了保证整体水质检测的准确性,要求机器人沿预设轨迹自主运行并实时检测,绕水池一周最终返回出发区,将本次监测数据进行求均值处理,实验过程如图8所示。
4)在控制温度相同且适合鱼类生存的条件下,人工加入污泥、有机物、化学元素等污染物,逐渐提高水体的浑浊度,并重复步骤2)、3)。
5)继续加入上述污染物,提高浑浊度等级,并重复步骤2)、3),本步骤重复8次。
6)分析每次实验测量取均值处理后的电压和浑浊度数据,并绘制图表与理论电压-浑浊度曲线作对比。
5.1.2 温度检测实验步骤
1)重新在水池中灌入清洁水,保证水面高度达到650 mm,在水池中加入大量冰块使水的温度降低到15 ℃,要求初始水质适合鱼类生存。
2)将机器人放置在水池边缘的出发区,并启动机器人的水质检测功能。
3)机器人沿预设轨迹自主运行并实时检测,绕水池一周最终返回出发区,将本次监测数据进行求均值处理。
4)控制浑浊度相同且适合鱼类生存的条件下,在水池中放入加热设备,每间隔2小时重复步骤2)、3),本步骤重复9次。
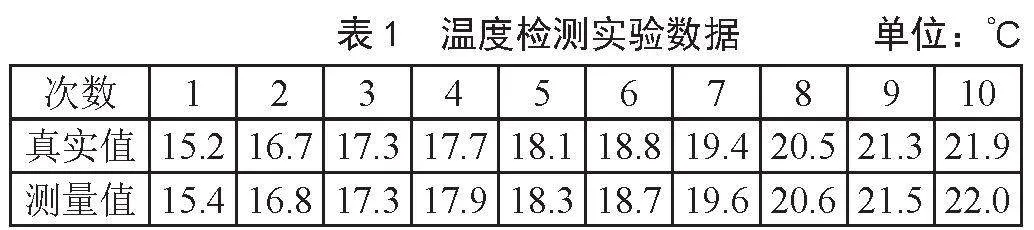
5)分析每次实验测量取均值处理后的温度数据,据此绘制图表与人工测量的真实值作对比。
温度检测实验数据如表1所示。
5.2 实验结果
按上述步骤完成实验,对所获监测数据进行处理分析,实验结果表明,渔业养殖管家机器人能够完成水质检测功能。
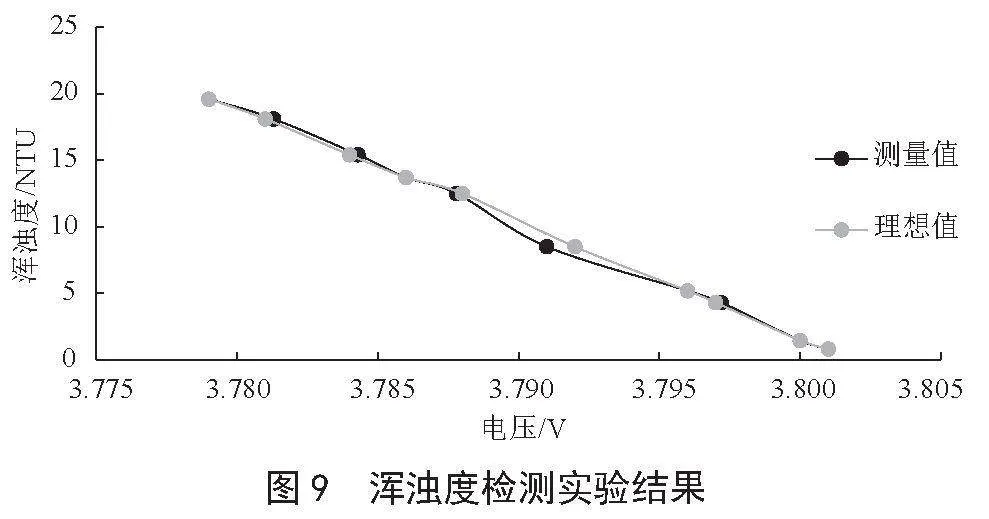
5.2.1 浑浊度检测实验结果
机器人循迹过程中浊度传感器对于水体浑浊度检测实验结果如图9所示,实验数据如表1所示,当温度保持恒定时,改变水体浑浊度,我们能够观察到,浊度传感器测量结果与电压值呈现出良好的线性关系,与理想浑浊度符合程度高,机器人检测结果准确度高达98%,能够准确且稳定地测量水体浑浊度数值。
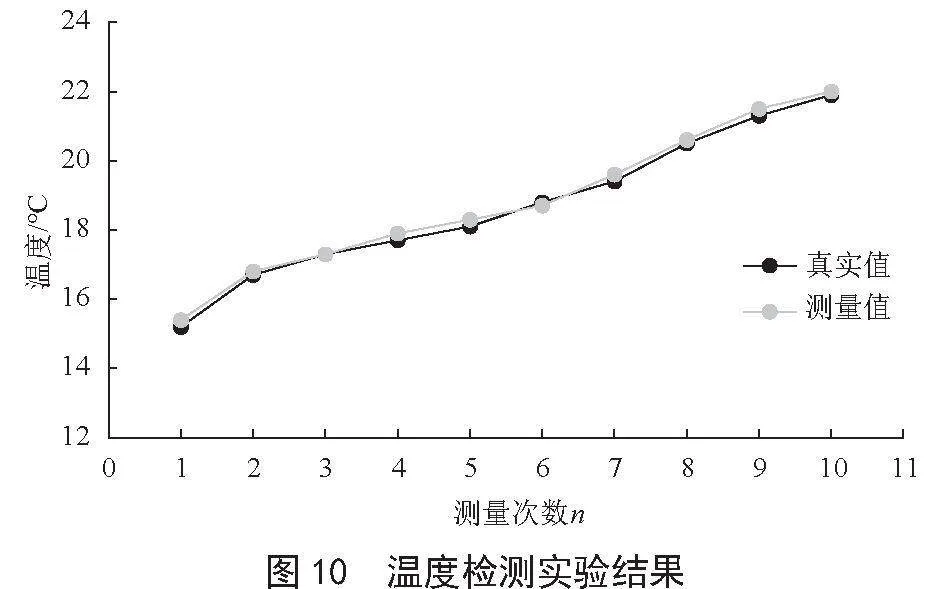
5.2.2 水体温度检测实验结果
机器人循迹过程中温度传感器对于水体温度检测实验结果如图10所示,实验数据如表1所示,控制浑浊度不变,逐步改变水体温度,所获水下机器人检测数据与真实值符合程度良好,所得结果准确度高达98%。结果表明,机器人样机搭载的温度传感器具有较高的精度和准确性,能够有效地监测水体温度变化。通过这种方式,机器人可以帮助养殖人员实时掌握养殖水体的温度情况,及时调节水质环境,防止因温度波动引起的养殖问题发生。
6 结 论
针对渔业养殖过程中的水质监测问题,本文探究了水下巡检机器人原理,设计了一种以水质动态监测为主要功能的渔业养殖管家机器人,制作了机器人样机并进行水下实验。实验结果表明,该机器人能够实现对水体浑浊度和温度的动态监测,但本系统还缺少溶解氧、重金属等物质含量检测功能,实际效果还有待进一步提高完善。未来水质检测机器人在很多领域都会有广泛用途,它的应用将会为渔业养殖工业化智能化发展添砖加瓦。
参考文献:
[1] 农业农村部关于加快水产养殖机械化发展的意见 [EB/OL].[2024-01-09].http://www.njhs.moa.gov.cn/tzggjzcjd/202011/t20201110_6356101.htm.
[2] 张泽彤,徐喆,佟石磊,等.面向渔业水域的水质检测机器人设计 [J].山西电子技术,2020(3):12-13+67.
[3] 侯茂林,马春燕,庞健,等.小型水下机器人运动控制系统设计 [J].现代电子技术,2023(22):53-57.
[4] 李道亮,刘畅.人工智能在水产养殖中研究应用分析与未来展望 [J].智慧农业:中英文,2020(3):1-20.
[5] 许裕良,杜江辉,雷泽宇,等.水下机器人在渔业中的应用现状与关键技术综述 [J].机器人,2023(1):110-128.
[6] 马建民,李晓东,高天羽,等.基于光视觉技术的海底管道自主巡检系统研究 [J].计算机测量与控制,2022(6):32-37+58.
[7] 覃建业,喻浩,何仁杰,等.基于无线通信的水下水质检测机器人系统设计 [J].电子设计工程,2023,31(20):30-34.
[8] 韩冲,苏涛,谢基榕.基于OpenCV的水下机器人单目定位技术研究与仿真 [J].计算机测量与控制,2017,25(12):219-223.
[9] 刘兴国,刘兆普,王鹏祥,等.基于水质监测技术的水产养殖安全保障系统及应用[J].农业工程学报,2009,25(6):186-191.
[10] 马少华,吉英莲,李佳萍,等.一种海洋石油管道巡检机器人:CN202222256531.X [P].2022-08-26.