瓦斯探测仿生蜘蛛机器人的研究与设计
2024-11-02赵振磊张美长张嘉辉谭瑶计广硕王金鹏邓春鑫



摘 要:为保障煤矿安全生产,更好地监测井下瓦斯浓度。该文设计一款可以在矿井复杂环境中完成瓦斯浓度实时监测与预警、数据传输的多功能六足智能仿生机器人。该仿生蜘蛛机器人可以在煤壁上安全做业,机器人在煤壁采集的数据将被传送到云平台。并在云平台使用WOA-LSTM算法对瓦斯浓度进行预测。运用双目摄像头以及激光雷达等多种传感器实现融合定位功能,使机器人在井下有序作业。该机器人通过感知、导航、控制以及智能决策等方面的协作,实现对复杂环境下的高效精确巡视,以确保矿井安全生产。
关键词:仿生;瓦斯检测;WOA-LSTM;瓦斯超前预测;矿井灾害防治
中图分类号:TD76 文献标志码:A 文章编号:2095-2945(2024)31-0034-04
Abstract: In order to ensure safe production in coal mines, the concentration of underground gas should be better monitored. In this paper, a multifunctional six-legged intelligent bionic robot is designed that can complete real-time monitoring and early warning of gas concentration and data transmission in complex mine environments. The bionic spider robot can safely operate on the coal wall, and the data collected by the robot on the coal wall will be transmitted to the cloud platform. The WOA-LSTM algorithm is used to predict gas concentration on the cloud platform. Binocular cameras and multiple sensors such as lidar are used to realize the fusion positioning function, allowing the robot to operate in an orderly manner underground. The robot achieves efficient and precise inspections in complex environments through collaboration in sensing, navigation, control and intelligent decision-making to ensure safe production in mines.
Keywords: bionics; gas detection; WOA-LSTM; advanced gas prejtVrf7/aUzuslnXtE9UvYbLgINvxRGJXdB0WMVDvtDU=diction; mine disaster prevention
近几年,随着科技的不断创新,生态文明的建设日益为全社会、全民族所关注。对矿业而言,建立一套符合我国实际情况的现代矿业系统已刻不容缓。根据矿井实际情况,矿井瓦斯一直存在关乎煤矿安全生产的重大安全隐患。井下人工巡检存在诸多弊端,如低效、客观标准不足、判断依据不科学和特殊工位危险等,已无法适应现代化井下生产需求,给设备安全运行埋下安全隐患[1]。在现代化矿山绿色建设理念下,煤矿工业巡检机器人日益普及和增长,矿业公司正积极采纳高新技术和先进的机械设备来取代传统的人工作业方式[2]。形成通过物联网技术实现矿井瓦斯智能监测和管理的系统是煤矿行业发展中提升信息化和自动化水平的重要方向[3]。
1 设计原理
本项目拟采用仿生学理论,借鉴蜘蛛、壁虎等动物的生物学特性及运动规律,通过仿生学原理,模仿蜘蛛的运动方式,使其具有多足行走的能力。通过对马克·卡特科斯基教授开发的一种新的纳米材料的研究分析,发现该纳米涂层可以比较容易地吸收和释放目标物,并将其运用于机器人足部。另外,传感器的反馈与控制算法也发挥着重要的作用。
2 系统总体设计
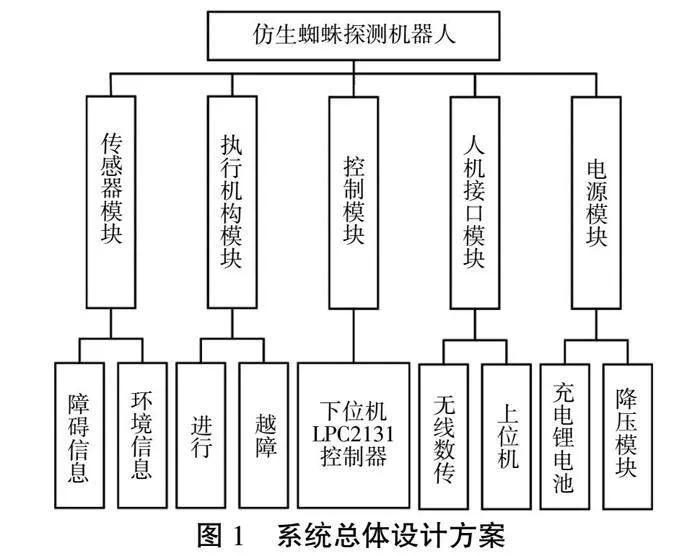
系统设计一个基于AR M7控制的仿生蜘蛛探测机器人,分为上位机和下位机2个部分。下位机控制模块由LPC2131作为控制核心;执行机构模块具有行走和越障功能,既可以通过远程操控机器人进行基本的行走,也可以切换到自动行进的模式中利用红外传感器探测周围的环境信息,进而对前方的障碍物及时做出反应;传感器模块负责采集障碍信息和环境信息,对当前环境温度和瓦斯数据进行采集,并通过人机接口模块将数据无线传输给上位机界面,利用LabVIEW软件的图形化编程语言,设计上位机并实现数据的动态显示及分析,报警处理等功能;电源模块由聚合物锂电池和降压模块组成。系统的总体设计方案如图1所示。
图1 系统总体设计方案
3 机器人硬件结构设计
3.1 电控部分
多传感器融合检测:多传感器信息融合就是将多个传感器在时间或空间上收集到的互为补充或有所重叠的信息,按照特定的标准进行整合,从而得到对被观测对象统一且准确的认识或解释[4]。机器人的感知系统由一系列传感器组成,这些传感器能够监测一氧化碳、温度、粉尘浓度、甲烷水平以及捕捉图像[5]。机器人利用装有各种传感器元件的系统与外部环境交换信息,实时测量周围环境状态的数据,并将其通过不同接口传送至单片机进行处理与分析[6]。
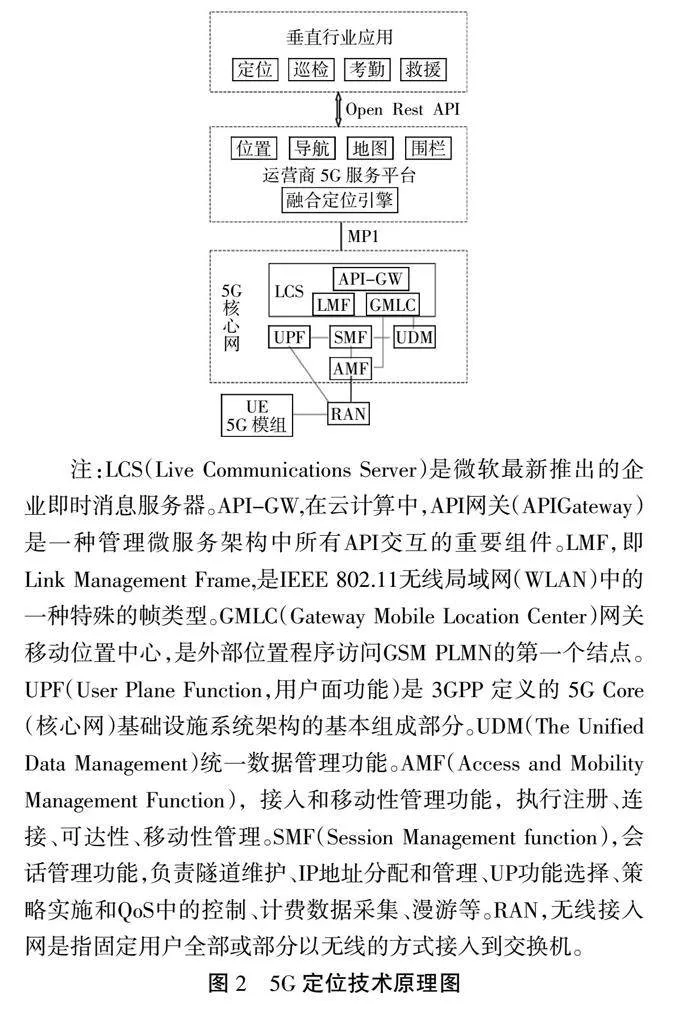
信息传输及定位功能:本装置采用移远的RM500u-CN通信模组进行数据传输,该模块内置丰富的网络协议,集成多个工业标准接口,并支持多种驱动和软件功能(如Windows,Linux,Android等),使其可以在井下精确完成信号的接收与发送(图2)。
图像采集功能:该装置采用煤矿自动化防爆摄像仪。
3.2 机械部分
3.2.1 模型整体结构
模型整体结构如图3所示。
3.2.2 机械结构设计
1)躯干部分(图4)对蜘蛛机器人至关重要,它不仅是机器人各个部分的物理连接中心,也承载着多种关键的电子组件。
下面是躯干设计部分的更详细介绍。
①安全性与拆解便捷化:整个躯干部分由上下2部分组成,主要为防爆材料,上下2部分通过嵌合的方式由螺丝固定,这种嵌合方式第一是防止矿井内灰尘或者水汽对机器人正常运行的影响,第二是相比于正常固定的方式,该种方式使躯干内部更加密闭。②刚性与重量平衡:选用的材料和躯干的几何形状应确保足够的刚性,以承受因运动产生的应力,保证机器人的敏捷性。考虑到重量和强度,躯干的主要组成部分使用高强度的铝合金(例如7075-T6),该材料具有良好的机械特性和良好的耐腐蚀性。
注:LCS(Live Communications Server)是微软最新推出的企业即时消息服务器。API-GW,在云计算中,API网关(APIGateway)是一种管理微服务架构中所有API交互的重要组件。LMF,即Link Management Frame,是IEEE 802.11无线局域网(WLAN)中的一种特殊的帧类型。GMLC(Gateway Mobile Location Center)网关移动位置中心,是外部位置程序访问GSM PLMN的第一个结点。UPF(User Plane Function,用户面功能)是 3GPP 定义的 5G Core(核心网)基础设施系统架构的基本组成部分。UDM(The Unified Data Management)统一数据管理功能。AMF(Access and Mobility Management Function),接入和移动性管理功能,执行注册、连接、可达性、移动性管理。SMF(Session Management function),会话管理功能,负责隧道维护、IP地址分配和管理、UP功能选择、策略实施和QoS中的控制、计费数据采集、漫游等。RAN,无线接入网是指固定用户全部或部分以无线的方式接入到交换机。
2)机械爪部分。矿下蜘蛛机器人的机械爪非常关键(图5),其需要适应恶劣的矿井环境并完成多种作业任务。
以下是矿下蜘蛛机器人的机械爪设计部分的详细介绍:①结构强度和耐用性:机械爪使用耐磨和高强度的材料制造,以确保在矿井中与岩石或其他硬质物质接触时能承受大的冲击和摩擦。②操作灵活性:设计提供了足够的运动自由度,使得爪子可以模仿人类手的运动,从而更好地适应各种形态的物品和操作需求。爪子的末端使用了类似人类指尖的设计,附加特殊涂层增加摩擦力,以实现对复杂岩壁的攀爬和支撑。③连接机构:机械腿与躯干之间的连接采用转动关节的结构。
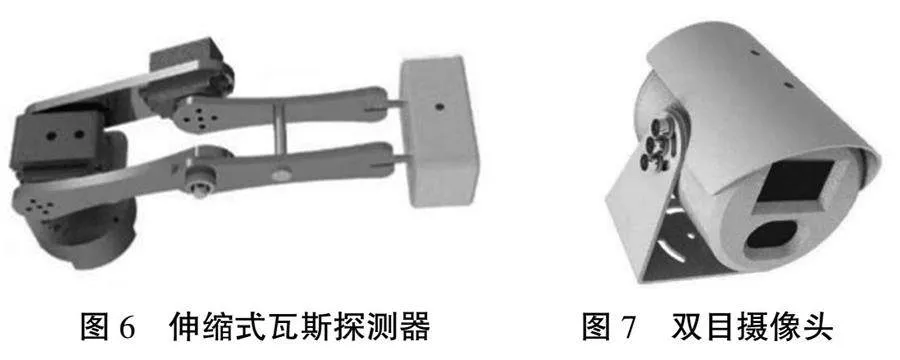
3)瓦斯传感部分。伸缩式可旋转瓦斯探测器(图6)是一种检测矿井内瓦斯浓度的设备,其放置在躯干的上方。
①伸缩臂部分。伸缩臂通常由多个段落组成,类似于摄影三脚架腿或无线天线的设计,采用内套筒设计,以便外部的筒体可以滑入内部筒体中,节节收缩或者伸展。②传动机构。为了伸缩硬臂,采用液压驱动机构,用来精确控制臂的伸缩。③旋转基座部分。使用回转支承确保传感器底座在水平平面内能360°自由旋转的机械转接部分。通过伺服电机配合适当的齿轮安装在底座上,允许对旋转角度进行精确控制。
4)双目摄像头部分。整体摄像头位置需考虑到机器人的运动范围和操作场景,确保双摄像头系统(图7)在恶劣的矿下环境中也可以稳定工作。
摄像头的装配主要为2个部分,第一部分为瓦斯探测器上的小型双目摄像头,该部分的主要作用是能够清晰地观察到泄露点的情况;第二部分是躯干上的双目摄像头,该部分主要作用是可以清楚地监测到机器人在矿井内的巡检情况。
3.3 算法设计
煤矿瓦斯监测预警的主要任务是利用传感设备全面、实时、连续监测井下巷道空间瓦斯浓度和预测瓦斯突出危险状态,及时分析异常变化并控制瓦斯浓度在安全范围内,防范和抑制事故苗头,实现对瓦斯危险源的预报和预警[7]。
为了更精确地预测巷道的瓦斯浓度,本文采用了一种创新而高效的混合算法,即WOA-LSTM算法。该算法结合了鲸鱼觅食优化算法[8](WOA)和长短期记忆[9]神经网络(LSTM),建立WOA-LSTM模型以应对瓦斯预测问题。
下面是一个简单的流程框架,用于说明如何利用WOA优化LSTM参数,并且将模型应用于数据的预测,在WOA的过程中调节LSTM的参数。
第一步:初始化参数。初始化WOA算法的参数,包括种群大小、迭代次数、初始位置、降权因子a和线性递减参数A等。初始化LSTM的参数,包括隐藏层节点数、学习率以及权重和偏置等。
第二步:数据预处理。为了提高模型预测的精度,并避免数据影响导致的过拟合等问题,因此对数据进行了归一化处理,消除了数据的量纲影响。采用以下公式进行归一化处理
第三步:特征筛选。为了减少模型的复杂性并提高模型的效率,利用皮尔逊相关系数分析对输入数据进行筛选。通过合理选取模型输入的特征因子,可以更精准地捕捉数据间的相关性,从而优化模型的性能。
第四步:参数优化。WOA算法优化LSTM,通过计算最优适应度值,得到LSTM算法中参数的最优值。这一步骤使得模型能够在训练过程中更好地调整参数,以适应数据的特征,并进一步提高模型的预测精度和泛化能力。
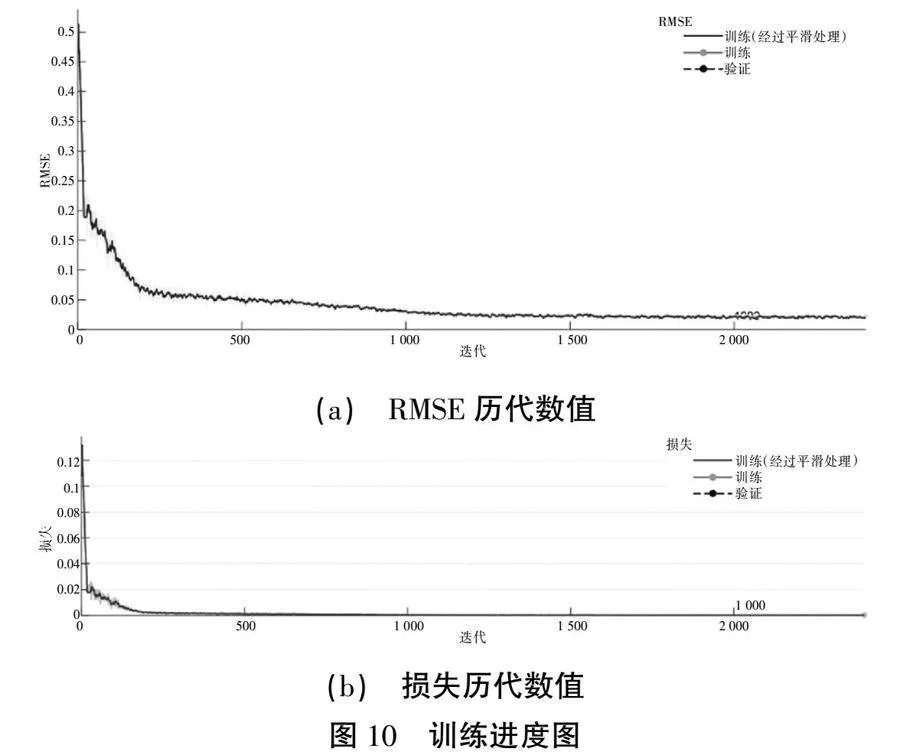
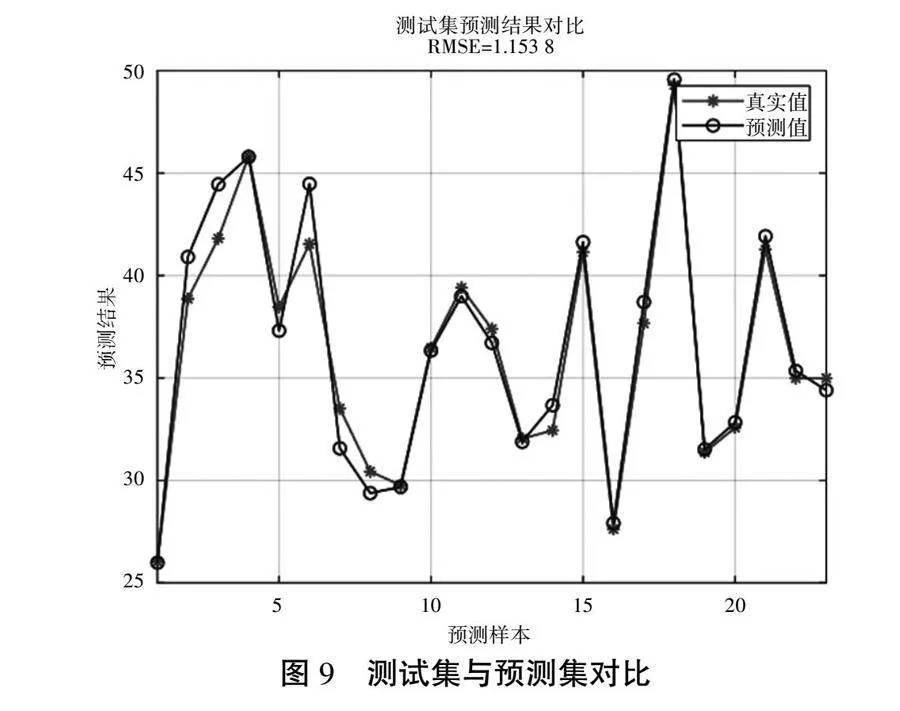
第五步:训练WOA-LSTM模型。将优化得到的新参数应用于LSTM模型中,并利用预先划分好的训练集对新模型进行训练。随后,利用测试集对训练好的模型进行验证,以确保其在未知数据上的泛化能力。最终,将新的数据集输入模型进行预测,从而完成整个模型的训练和应用(图8—图10)。
4 系统软件设计
4.1 探测机器人控制程序设计
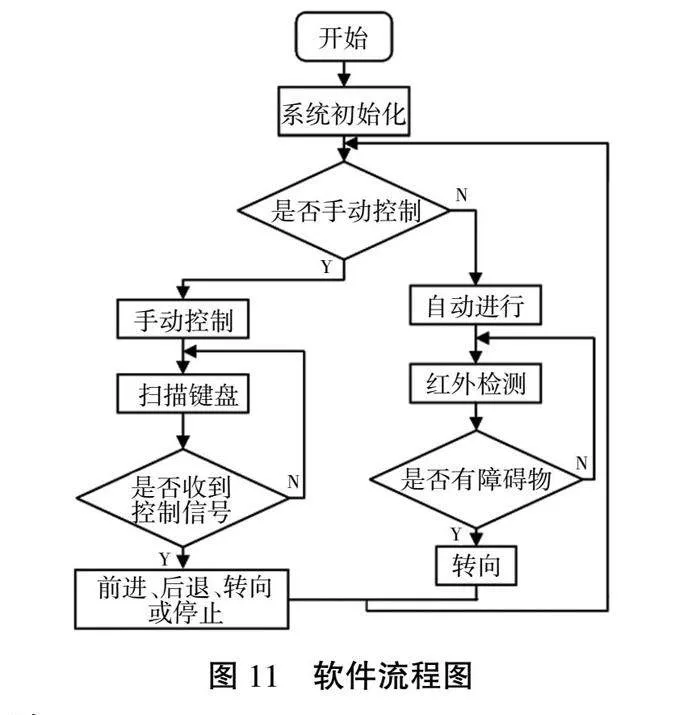
控制舵机要求有一定占空比的脉宽调制波形,才能使机械臂旋转到一定的角度,所以要对舵机进行控制,就必须给其输出脉宽调制信号。LPC213X系列单片机是一个32位的机器,其处理速度很快,编程起来也很容易,并配备了6个 PWM输出通道,能够很容易地产生精确的 PWM波形。但是,这次设计的机器人有18个自由度,要对18个舵机运行进行控制,因此,编程方式采用了常用的使用计时器和 I/O端口来模拟输出脉宽调制信号的方式。图11显示了仿生蜘蛛探测器的软件流程。
4.2 探测机器人上位机设计
上位机部分采用单片机STC12C5A60S2作为上位机,采用虚拟仪器进行人机交互。为了确保上位机与下位机之间的通信能够通过串口与上位机的接口实现,该系统使用了图形化的模块语言编写程序,完成了对探测结果的趋势曲线的显示和报警等功能。
图11 软件流程图
5 结论
随着科技的不断进步与创新,煤矿巡检机器人在提高煤矿的安全与生产效率方面将发挥越来越重要的作用。该项目组提出了研究思路,在避障路径规划、实时避障、数据分析和5G通信等方面进行研究,力求实现一种创新性和智能化的产品。同时,通过挖掘数据辅助企业优化生产流程,提升生产效率,并对矿山环境状况进行监控,达到安全高效生产的目的。
参考文献:
[1] 王先彭.矿井巡检机器人组合薄壳杆式升降探测云台研究[D].徐州:中国矿业大学,2022.
[2] 秦伟华.煤矿用带式输送机巡检机器人设计与研究[D].太原:太原理工大学,2021.
[3] 毛馨凯.基于物联网的矿井瓦斯智能监测系统关键技术浅析[J].科技视界,2023,13(34):68-72.
[4] 董文清.智能机器人的现状与发展[J].机械制造,2019,57(1):36-38.
[5] 王雄.煤矿井下探测机器人控制系统设计[J].机械与电子,2014(1):77-80.
[6] 王国法,赵国瑞,任怀伟.智慧煤矿与智能化开采关键核心技术分析[J].煤炭学报,2019,44(1):34-41.
[7] 朱世松.煤矿瓦斯监测多传感器信息融合与知识发现研究[D].徐州:中国矿业大学,2014.
[8] SEYEDALI M, ANDREW L. The Whale Optimization Algorithm[J].Advances in Engineering Software,2016(95):51-67,
[9] GREFF K, SRIVASTAVA R K, KOUTN?魱K J, et al. LSTM: A search space odyssey[C]//IEEE transactions on neural networks and learning systems,2016:2222-2232.