基于图像识别与PID控制的巡检摄像机预置位自动纠偏技术研究
2024-10-25李军吴喜春








摘要:针对变电站摄像头在自主巡检时位置偏离预置位的问题,提出一种基于图像识别和PID控制的巡检摄像头预置位自动纠偏技术。首先,分析了巡检摄像机基本传动原理及传统预置位纠偏方法;然后,利用改进的Mask RCNN的目标识别算法进行目标定位;最后,设计基于PID控制的步进电机纠偏运动方法,实现对摄像机偏移位置误差的自动校正操作。结果表明,所提方法在变电站复杂巡检场景中检测目标识别准确率高、预置位纠偏效果较好。
关键词:巡检摄像头;图像识别;Mask RCNN;PID控制;预置位自动纠偏
中图分类号:TP391.41 文献标志码:A 文章编号:1671-0797(2024)20-0085-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.20.020
0 引言
变电站巡检摄像头因其具备全天候测量等优势,已成为智慧变电站内电力设备监测的重要工具[1]。然而,巡检摄像头投入变电站长期运行后,受到偏转工作强度、传动误差、外界干扰、机械磨损等因素影响,其实际转动角度可能偏离期望预置位,进而降低了有效巡检图像比例以及表计读取等智能算法准确率[2]。
巡检摄像机设置预置位的目的是使云台相机拍摄到满足检测识别要求的高质量巡检图像。文献[3]利用图像配准方法解出巡检图像与模板图像间的像素误差。文献[4]使用裁剪的仪表模板图像与大视场巡检图像配准,提升仪表读数精度。然而,通过预置位纠偏对准相机的过程中,人工控制不能自动实现纠偏控制系统的调节,难以满足复杂场景下系统的实时纠偏需求,同时纠偏过程中巡检目标识别的准确性是摄像头自动调整的重要条件。文献[5]中采用的图像识别算法虽然能够有效定位目标物体,但在复杂背景下精度有所下降,对目标检测的泛化能力不够,导致图像偏差难以准确计算,使预置位纠偏工作效果低下。
为解决现有方法存在的不足,本文提出了一种基于图像识别和PID控制的巡检摄像头预置位自动纠偏技术。该方法首先通过改进图像识别算法将图像目标框定出来,然后将该位置误差输入基于PID控制器的步进电机控制系统中,进行摄像头预置位快速准确纠偏。
1 巡检摄像机预置位纠偏基本原理
1.1 巡检摄像机基本传动原理
智慧变电站巡检系统中用于收集图像、视频数据的智能球型摄像机是巡检工作的关键部分。目前云台大多采用具有传动效率高、结构紧凑和传动比准确等优点的同步带传动方案。考虑到经济性和结构工艺,云台传动控制通常采用开环控制系统。
1.2 传统预置位纠偏实现方法
传统的云台控制软件补偿程序流程如图1所示,即:
1)抓取当前位置图像,确定云台的位移量为图片偏差所确定的补偿值。
2)判断云台从当前位置到目标位置的水平位移量,精准控制云台转动,完成后重复步骤1)。然后判断云台从当前位置到目标位置的垂直位移量,精准控制云台转动。
对于巡检工作的不同监测目标对象的需求,图像中存在多个识别目标时,通常需要人工识别判断图中目标后发送指令触发不同的预置位软件补偿程序。在复杂的变电站巡检场景下该过程通常需要大量的人工识别工作。针对该类问题,研究人员提出基于图像分析的策略[6]来提升定位精度,但牺牲了响应速度,也没有解决预置位限制的问题。
2 基于深度学习的图像识别技术与图像偏差计算方法
2.1 基于Fine Mask RCNN的图像识别技术
为了能在背景复杂、光照多变的变电站运维环境下,准确识别变电设备中的仪表、绝缘子、母线、变压器等,本文基于Mask RCNN目标检测网络[7],提出了一种改进的Fine Mask RCNN目标识别算法。首先,利用ResNet-50和特征金字塔网络(FPN)所组成的特征提取器来获取变电站设备(隔离开关、表计、绝缘子等)的图像特征;其次,通过区域建议网络(RPN)和ROI Align进一步细化特征信息流,并采用信息融合模块生成精细化特征图;最终,通过分类回归器对精细化特征图进行分类、预测框回归与掩膜生成。
2.2 基于最大互相关匹配的图像偏差计算方法
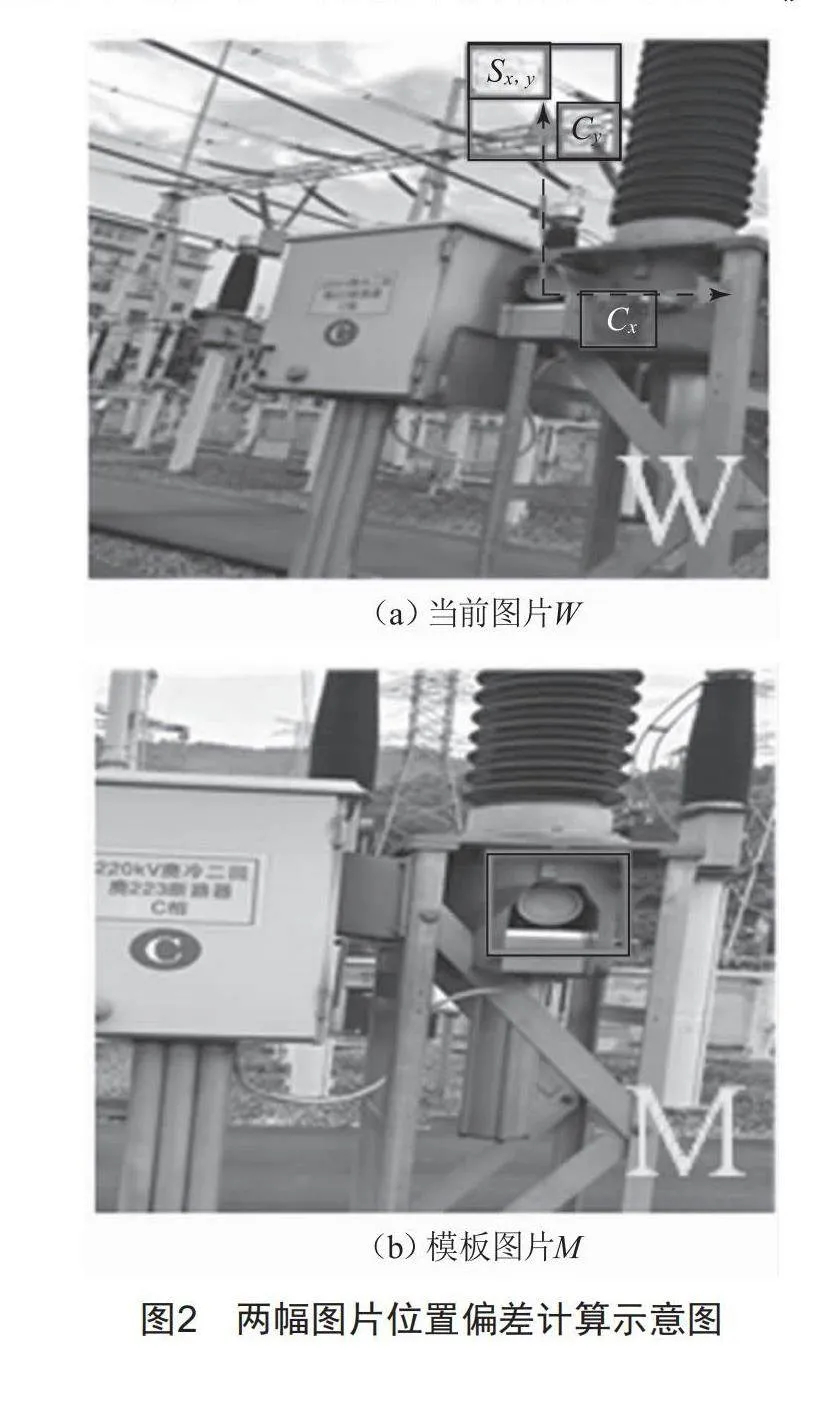
针对云台控制无法实时追踪的问题,本文采用了一种基于图像分析的反馈控制策略,利用最大互相关匹配法计算出当前图片与模板图片的位置距离。图片W大小为A×B,即当前图片,设为p(x,y);图片M大小为a×b,即模板图片,设为g(x,y)。在W中找出与M相似的部分,记为Cx,y,其计算过程为:
Cx,y(i,j)=p(x+i-1,y+j-1),
i=1,2,…,m;j=1,2,…,n (1)
σ(x,y)= (2)
式中:σ(x,y)代表Cx,y与M的相关系数;E为M的方差;cov(Sx,y,M)为Sx,y与M的协方差。
Ex,y=Sx,y(i,j)-
x,y2 (3)
E=g(i,j)-
2 (4)
cov(Sx,y,M)=Sx,y(i,j)-
x,yg(i,j)-
(5)
式中:x,y和分别表示图像Sx,y和M的灰度均值;Sx,y(i,j)为Sx,y中第i行j列像素的灰度值;g(i,j)为M中第i行j列像素的灰度值。
图2所示的两幅图片中,Sx,y是W中与M完全相同的区域。对图像M进行扫描,确定最大的σ(x,y)对应的Sx,y的中心坐标,此中心坐标与W的中心坐标相减,可计算出当前图片与模板图片的位置距离(Cx,Cy)。
2.3 PID复合控制系统
本文所构建的摄像头转动步进电机是一个复杂的非线性系统模型,纠偏运行过程中参数会变化,且存在不确定性和严重的外部干扰。本文设计了一种基于PID复合控制策略的“二输入三输出”步进电机控制系统。控制过程中对PID参数进行自适应在线调整,完成云台电机的自动调整,从而实现巡检摄像机的自动纠偏。PID算法控制规律为:
u(t)=KPe(t)+KIe(t)dt+KDΔe(t) (6)
式中:u(t)为控制系统输出量;e(t)dt为被控对象在t时刻的误差;Δe(t)为被控对象在t时刻的误差变化率;KP、KI、KD为比例、积分、微分增益。
在线整定KP、KI、KD参数公式为:
KP=KPP+ΔKP,
KI=KII+ΔKI,
KD=KDD+ΔKD (7)
式中:KPP、KII、KDD为PID控制器的参数初始值;ΔKP、ΔKI、ΔKD分别对应KP、KI、KD三个参数的在线变化量。
3 实验分析
3.1 图像识别方法的有效性
为验证所提出的Fine Mask RCNN识别算法的有效性,将其测试识别结果与Mask RCNN算法识别结果进行对比。如表1所示,相比Mask RCNN,本文算法在准确率和召回率上表现更好,Fine Mask RCNN准确率提升了4.44个百分点,召回率提升了3.1个百分点。本文所提算法图像识别可满足变电站复杂背景的识别需求。
不同算法检测结果的对比情况如图3所示。通过多次实验发现,Mask RCNN可将待检测物体正确定位和分类,但是改变测试图片采集角度会对该算法检测结果产生影响。当被检测物体存在部分遮挡时,图(a)算法存在漏检现象;而Fine Mask RCNN识别能力更强,能够精确地检测出目标物体,如图(b)所示。
3.2 纠偏系统实际效果
在复杂变电站环境中存在大量干扰纠偏工作的因素,为验证本文所提纠偏方法在实际工作中的控制效果和抗干扰能力,将该方法部署于纠偏系统中。采用基于图像识别与PID控制策略的纠偏方法进行变电站巡检摄像头纠偏前后的图像对比,结果表明纠偏效果可以满足变电站巡检需求,如图4所示。
4 结束语
本文构建了Fine Mask RCNN图像识别算法,并结合PID控制实现了巡检摄像机预置位自动纠偏,主要得到以下结论:
1)本文所提的Fine Mask RCNN在变电站实拍图片下的定位和识别效果优于Mask RCNN;
2)本文构建了步进定位纠偏系统的系统传递函数,设计了基于PID控制器的纠偏控制策略,提高了系统的纠偏精度和抗干扰能力。
[参考文献]
[1] 马富齐,王波,董旭柱,等.电力工业安全影像解译:基本概念与技术框架[J].中国电机工程学报,2022,42(2):458-475.
[2] 万吉林,王慧芳,管敏渊,等.基于Faster R-CNN和U-Net的变电站指针式仪表读数自动识别方法[J].电网技术,2020,44(8):3097-3105.
[3] 刘晶,钟力强,董娜.变电站巡检机器人视觉精确定位算法研究[J].工业仪表与自动化装置,2019(6):8-13.
[4] 彭向阳,金亮,王锐,等.变电站机器人智能巡检技术及应用效果[J].高压电器,2019,55(4):223-232.
[5] REDMON J,DIVVALA S,GIRSHICK R,et al.You only look once:Unified,real-time object detection[C]// Proceedings of the IEEE conference on computer vision and pattern recognition,2016:779-788.
[6] 刘萍萍,赵宏伟,臧雪柏,等.移动机器人定位图像匹配的快速局部特征算法[J].仪器仪表学报,2009,30(8):1714-1719.
[7] HE K,GKIOXARI G,DOLLAR P,et al.Mask r-cnn[C]// Proceedings of the IEEE international conference on computer vision,2017:2961-2969.
收稿日期:2024-06-12
作者简介:李军(1983—),男,湖北秭归人,工程师,从事电力系统运行工作。
吴喜春(1990—),男,湖北武穴人,硕士研究生,高级工程师,从事电力系统运行工作。