掘进巷道局部通风机智能控制系统应用研究
2024-10-23王翰琦

[摘 要]局部通风机可为矿井巷道掘进和生产提供新鲜的空气,调节瓦斯浓度,保证作业安全。局部风机控制系统具有纯滞后、非线性、多扰动等特征,传统的PID 控制方法难以达到理想的控制效果。文章提出并应用了智能控制系统—— 模糊控制。实践表明,改进后的模糊控制器可以根据掘进工作面调节瓦斯浓度,确保井下作业环境安全,且节能效果显着。
[关键词]巷道;局部通风;智能控制;模糊控制
[中图分类号]TM63 ;TP273.5 [文献标志码]A [文章编号]2095–6487(2024)05–0011–03
1 巷道局部通风机系统现存问题
近年来,矿井事故频发,其中瓦斯事故占比较高。瓦斯事故是指瓦斯浓度超过阈值时发生的爆炸、火灾或者引发井下作业人员窒息等事故,这些都是因巷道井下通风系统的严重滞后性导致的。巷道广泛应用的通风系统都是采取预先设定的原则,通风流量由以往经验即估算结果进行设定,巷道的通风量不能及时根据瓦斯浓度进行调整,这就导致传统的通风系统难以应对突发的瓦斯突涌事故,且局部通风机长期以大功率进行工作也会增加矿井开采成本。巷道井下通风依据挡风板的开度调节风速,难以形成远程监控。随着巷道掘进面不断向前推进,通风机安装的位置及设定的风量难以满足现有巷道的需求,导致新鲜空气难以及时输送到掘进工作面。
2 智能局部通风系统优化与布置
巷道局部风机的风量大小与巷道截面、长度、瓦斯浓度、空气湿度及煤尘含量等因素相关。采用模糊控制系统的输入变量为优化后的遗传算法Elman 神经网络,对巷道的实时风量进行迭代计算,然后根据巷道内瓦斯、流速传感器采集的信息与当前的风机进风量进行比对后,分析误差和误差率的大小。然后判断是否进行风量调节。风机系统得输出变量为电压,通风系统运行过程中,将神经网络预测的风量和风量传感器采集的实时风量进行对比,可得到巷道内风量误差信息,各自的模糊量可根据相关从属函数进行计算求解,再根据模糊控制规则进行模糊决策处理,对控制变频器的输出变量进行反模糊化。基于上述流程达到改变电机的转速,实现风机风量的智能化控制,从而可以实时达到智能控制通风量的应用效果。
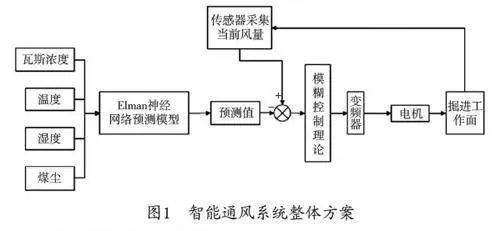
巷道局部通风是巷道通风系统的重要环节,在巷道掘进面推进过程中,如果井下环境发生急剧变化,会导致巷道内局部位置的通风需求量增加。例如,若发生瓦斯KD98loO7lx0Nl0AJcrJ9YKUry/dk148ZEqTi1p4nZxw=突涌事故,则需要局部通风机提供更大风量,以确保巷道内的瓦斯浓度处于正常范围。瓦斯突涌事故结束后,巷道局部的通风需求量显著降低,此时需要利用智能化控制系统及时降低风量,达到解决电能目的。为了满足通风量与需求量的供需关系,引入模糊变量进行智能控制。图1为智能通风系统整体方案。
2.1 智能模糊控制系统
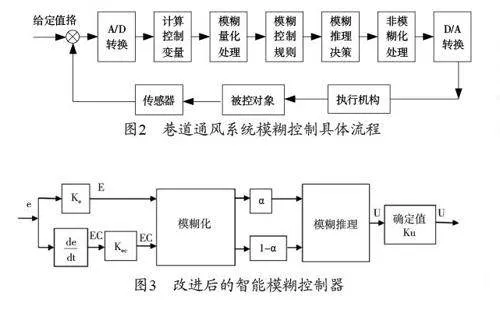
巷道通风智能控制系统可以依赖模糊控制系统来实现,模糊控制可以将模糊语言变量及更为复杂的逻辑推理和集合运算包含在内。将井下巷道的瓦斯浓度、所需风量、环境温度等模糊语言转换为计算机可识别的二进制运算程序,从而将复杂的通风供需问题变成可编译处理的数学问题。图2 为巷道通风系统模糊控制具体流程。
根据输入的环境变量进行模糊处理及决策制订,从而达到通风机的智能化控制。模糊控制系统主要由控制器、执行器、传感器及输入和输出接口等部分组成。控制器是整个通风机智能控制的关键,运行过程中根据模糊规则对输入数据进行分析处理,可实现控制过程中所需的各种模糊算法。输出控制量的模糊值可以通过清晰的接口转换成执行器可以接收的精确量。根据安装在巷道内的传感器获得瓦斯含量的实时精确数值,将实时精确值与系统的设定值比较后得到偏差值,此为模糊控制器的一个输入量。所采用的模糊控制规则是用模糊理论中的模糊条件语句来描述的,因此模糊控制器是一种语言控制器,是控制系统的“智能”部分。智能通风控制系统需要模糊化的接口,将输入的参数值进行输入与转换,然后进行数据变量与模糊变量之间的转换,根据程序中的模糊处理方式和控制规则,从而制订风量决策。对数据进行解码处理,转化为变频器可以理解的电信号,从而达到智能控制风量的目的。
2.2 智能模糊控制器的改进
传统煤矿送风系统中,当巷道掘进面的送风需求变化时,井下通风控制人员随机强制执行过程具有明显的滞后性,而且控制精度很低,风量需求规律难以掌握,因此普通简单的数学模型无法描述这一类具有随机性和复杂性的问题。针对这些问题,设计了一种基于模糊控制的智能控制系统。模糊控制过程主要完成精确模糊化、模糊推理及非模糊化的任务。以气体浓度偏差E 和偏差率EC 为输入,风机输出转速U 为输出,设计二维模糊控制器。风机转速可以实时跟踪气体浓度的变化,实现通风量的实时动态调节。因此对模糊控制器进行改进,改进后的智能模糊控制器如图3 所示。根据瓦斯浓度的偏差和偏差率,自动调整二维模糊控制器的规则因子α,改变控制规则,生成相应的控制量,并进行的风机转速控制。对于二维模糊控制器,当输入变量偏差E、信号偏差率EC 和输出控制变量U 的域水平相同时。
根据传感器监测的瓦斯浓度变化情况,采用改进后的智能模糊控制器调节局部风扇转速,将巷道内的瓦斯浓度始终保持在规范规定的安全范围内。局部通风机智能调速模糊控制系统含有3 个重要部分:①局部通风智能控制保护器,控制器的CPU 采用TMS320F 芯片,可以对巷道内空气湿度、瓦斯浓度等参数进行处理分析,依据模糊控制规则下达风机功率的指令,从而高效控制通风机工作效率。②变频系统,变频器可以根据控制器输出的指令调整局部通风机电源的输入频率,从而改变局部风机的风量大小。③巷道局部风机,根据变频器输出的电源频率改变分机转速,达到实时变频、动态调整风量的目的。局部通风机智能调速模糊控制系统控制原理如图4 所示。
3 MATLAB仿真验证
利用MATLAB 图形化工具模糊推理系统编辑器建立了改进型模糊控制系统的仿真模型。给定信号是气体浓度,基本参数是额定功率1.6 kW、额定电压380 V、额定电流4.0 A、额定转速950 r/min 的异步电机。将风机转速模拟曲线与实验曲线进行对比,结果如图5 所示。从图5 中可以看出,MATLAB 模糊控制系统与实验数据吻合良好,这说明采用改进后的智能模糊控制器可以根据掘进工作面瓦斯浓度进行局部控制,即当巷道内瓦斯浓度较低时,局部通风机可根据变频控制器输出的指令,以较低的功率运行; 当瓦斯浓度较高时,智能调速模糊控制系统输出通风机高速运转的指令,及时的增大局部巷道的通风量,将高浓度瓦斯气体及时排出。
4 结束语
改进后的智能模糊控制器可应用于煤矿局部通风机控制系统。仿真和实验结果表明,控制系统能够根据掘进工作面瓦斯浓度的变化,连续且动态地调节控制器的变频速度,实时改变巷道风量来改变瓦斯浓度。即巷道通风机的转速可根据瓦斯气体的浓度自适应调节,确保井下作业环境安全。这不仅提高了通风机的效率,而且改善了掘进工作面的通风条件,节能效果十分显着。
参考文献
[1] 荆履财. 煤矿井下通风机“无人化”运行控制系统的研究[J]. 机械管理开发,2023,38( 12):207-208,211.
[2] 王静. 煤矿主通风机控制系统控制器优选[J]. 机械管理开发,2023,3(10):177-178.
[3] 南春伟. 煤矿井下局部通风机智能控制研究[J]. 机械管理开发,2023,38( 10):162-164.
[4] 郝荣鑫. 矿井局部通风机智能控制系统的设计及应用分析[J]. 西部探矿工程,2023,35( 8):106-109.