跨空间人工智能课堂教学行为案例研究
2024-10-15田俊林秋燕
摘 要 当前全国很多地区开始在中小学普及人工智能教育。为解决部分学校硬件配置不足问题,将虚拟仿真实验室融入面对面课堂的跨空间教学,已成为人工智能课程教学常态。为探究跨空间人工智能课堂的教学行为特征,研究借鉴FIAS、iFIAS和ITIAS,同时综合跨空间环境特征,构建跨空间人工智能课堂教学行为分析框架,并以“打卡机器人”公开课为例进行时序、结构、动态特征与交互特征分析,根据分析结果,从优化教学模式、合理化交互设计、促进高阶思维发展三方面提出教学建议。
关键词 中小学;跨空间;人工智能课堂;教学行为;打卡机器人;虚拟仿真实验室
中图分类号:G633.67 文献标识码:B
文章编号:1671-489X(2024)17-0-06
0 引言
近年来,人工智能技术逐步成为建设创新型国家的重要推动力。2017年,国务院印发《新一代人工智能发展规划》,明确“在中小学阶段设置人工智能相关课程”的要求,使得人工智能课程得到广泛重视。当前,江苏省、天津市、广东省广州市等在教育事业发展“十四五”规划中明确了“普及人工智能教育”的目标和任务,建设了虚拟教学平台。例如,广州中小学人工智能教学平台(https://ai.gzjyc.org/home)面向义务教育人工智能课程,提供人工智能模型演示与搭建、图形化编程与运行、任务布置与反馈的虚拟仿真实验室。面对面的实体空间课堂教学与虚拟仿真平台实践相融合,逐步形成人工智能跨空间课堂教学的常态。
为探究中小学跨空间人工智能课堂的教学行为特征,提升教学效率,本研究借鉴FIAS(Flanders Interaction Analysis System,弗兰德斯互动分析系统)、iFIAS(improved Flanders InteractionAnalysis System,改进型弗兰德斯互动分析系统)和ITIAS(Information Technology-based Interac-tion Analysis System,基于信息技术的互动分析编码系统),同时综合跨空间环境特征,构建跨空间人工智能课堂教学行为分析框架,以八年级“打卡机器人”公开课为例展开分析,并根据分析结果提出教学建议。
1 文献回顾与问题提出
虚实融合、线上线下融合的教与学,已成为诸多学者研究的焦点,研究也证实了其在参与度、师生互动、团队协作等方面的有效性。有研究表明,基于虚拟环境的线上教育有利于提高课程参与度[1];智慧教学平台支持下的课堂教学,学生的参与度和主体地位都较高[2];当小组协作面对面交流困难时,虚拟平台工具的支持有利于小组任务的完成[3];线上或虚拟教学平台可提供丰富的课程资源,促进师生的在线交流和教学互动[4];基于Unity3D和模块化虚拟拼装教学平台,能增强课程的灵活性和拓展性,凸显学生主体地位,有利于培养学生的沟通能力、创新能力和团队协作能力等[5]。与此同时,实体课堂中融入虚拟平台或资源后也出现一些新的问题。例如:实体课堂融入虚拟资源后,教学行为并未改变传统课堂的本质[6];学生对虚拟学习平台有用性的感知和态度以及后续使用意愿,均受有效教与学活动的影响[7]。可见,研究者大多聚焦于虚拟平台、资源等加入实体课堂后对学生行为的影响,较少关心教师在虚拟空间和面对面空间中的教学行为对学习行为和效果的影响。
人工智能课程普及过程中,为解决部分学校硬件配置不足问题,需在面对面教学时依托虚拟仿真实验室展开教学。那么,虚实融合的跨空间人工智能课堂师生互动行为有何特点?教与学互动行为效率如何?是否能够体现学生的主体地位?
本研究通过课堂观察和视频编码分析,采取定性与定量相结合的方法对跨空间人工智能课堂的师生互动行为进行分析,以期强化学生的参与度和体验感,推动人工智能课程教学目标的有效实现和学生智能素养的提升。
2 分析框架:聚焦跨空间人工智能课堂教学行为
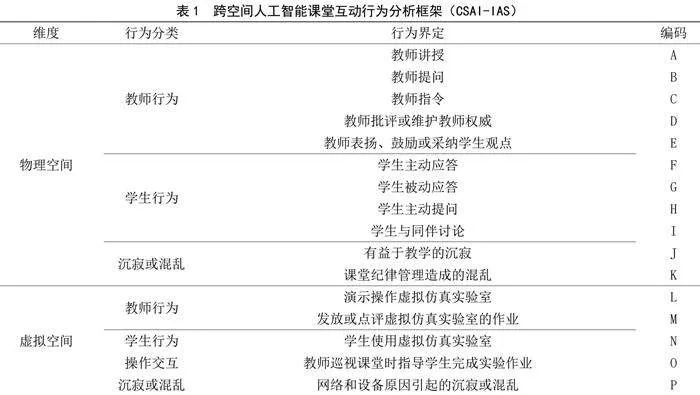
20世纪60年代,美国教育家Flanders N A[8]基于帮助教师实现自我导向专业发展的目的,提出FIAS,借此评估课堂教学质量。2004年,顾小清等[9]提出ITIAS,充分考虑应用信息技术的课堂教学特色,完善了FIAS缺少对信息技术进行分析的问题。方海光等[10]结合ITIAS中的技术元素,对FIAS作出优化,提出iFIAS。在已有研究框架的基础上,结合跨空间人工智能课堂特征,构建跨空间人工智能课堂互动行为分析框架(Cross-Space AI-classroom Interaction Analysis System,简称CSAI-IAS),如表1所示。
1)关注两个空间的行为,把CSAI-IAS划分为物理空间和虚拟空间两个维度。在物理空间,借鉴FIAS编码系统,将课堂行为分为教师行为、学生行为、沉寂或混乱三类。在虚拟空间,则参考ITIAS中的信息技术要素,综合人工智能虚拟实验室的功能特色,划分界定了教师行为、学生行为、操作交互、沉寂或混乱。
2)由于跨空间人工智能课堂包括面对面交互、虚拟仿真实验室中的师生交互、人机交互,因此,在iFIAS原有“无助于教学的混乱”类别中,将其细分为物理空间的“有益于教学的沉寂”“课堂纪律管理造成的混乱”和虚拟空间的“网络和设备原因引起的沉寂或混乱”。
3)基于虚拟仿真实验室的功能特点,将ITIAS“教师操纵技术”指标细分为“演示操作虚拟仿真实验室”和“发放或点评虚拟仿真实验室的作业”。例如,教师使用虚拟仿真实验室介绍打卡机器人模型组装、原理和流程等知识讲授型行为编码为L,教师发放、检验和分享学生作业完成情况等行为编码为M,以便能更精准地理清该互动行为的目的,并探讨对应的虚拟仿真实验室功能效果。
4)为能更好地体现师生在虚拟空间支持下思维和技术的交互,将教师巡视课堂时指导学生完成实验作业的行为编码为“O:虚拟空间—操作交互”。
3 案例分析:探索跨空间的课堂教学行为特征
本研究选取广东华侨中学八年级人工智能课程第6课“打卡机器人”公开课为分析课例。该课例是典型的跨空间课堂教学案例,师生同处于计算机网络教室,完成面对面的课堂讲授,小组协作、讨论与分享等活动;同时借助广州中小学人工智能教学平台的虚拟仿真实验室,完成打卡机器人的模型搭建、程序编写和作品交流分享。学生已具备一定的人工智能通识,能熟练使用该虚拟仿真实验室。
3.1 课例观察时序分析
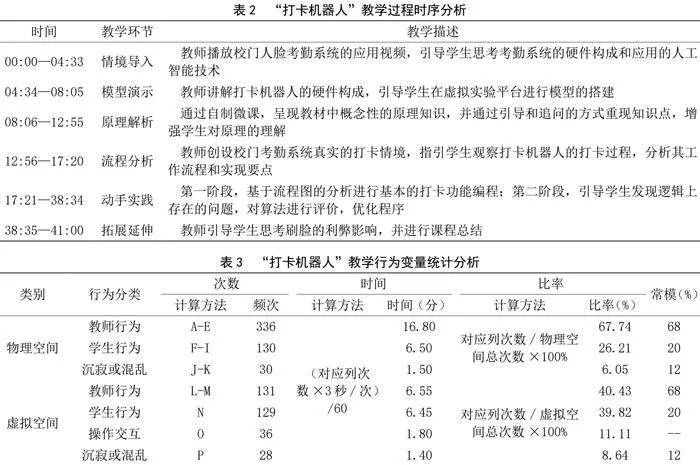
时序分析发现该课例教学过程分为六个环节,即情境导入、模型演示、原理解析、流程分析、动手实践和拓展延伸如表2所示。与教材内容呈现顺序基本一致,其中动手实践11分钟,其他环节2~5分钟不等,较好地突出了“做中学”的特征。在情境导入和流程分析环节均引入生活化情境,以具身认知来促进抽象知识的习得。模型搭建、程序编写和优化等任务在虚拟仿真实验室完成,任务量较大,部分学生完成度不高。那么,跨空间课堂应如何更好地安排教学行为呢?这就需要进一步进行课堂结构和动态特征分析。
3.2 课堂结构和动态特征分析
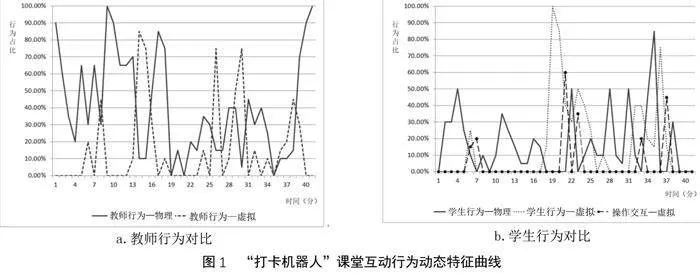
课堂中各类行为的占比能较好地反映课堂结构。如表3所示以3秒为间隔编码所得820条数据,经频次分析发现,物理空间教师行为和学生行为占比分别为67.74%和26.21%,可见在面对面的课堂交互中仍是以教师为主导,未能突出学生主体性;但是,教师提问的言语频次为76次,学生主动应答的频次为79次,说明师生面对面的问答交互效率较高。虚拟空间教师行为为131次,学生行为129次,两者接近1∶1,说明基于虚拟平台上学习任务的师生互动良好,学生参与度高。其中,教师巡堂时指导学生完成实验作业的行为频次为36次,教师的主导功能体现明显。
进一步对比物理空间和虚拟空间的师生行为比率与常模值的差距发现,两者均呈现出学生行为比率高于常模值。尤其是虚拟空间学生行为比率占39.82%,远高于常模值20%。综上,在“打卡机器人”这一跨空间人工智能课例中,基本遵循学生为主体、教师为主导的教学结构,并体现出问题驱动式的引导,有利于提升学生的自主实践效率和参与度。
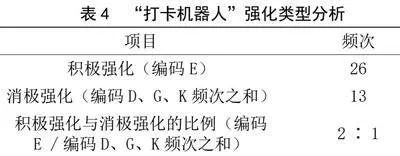
然而,课堂是连贯且持续进行的,单一的行为频次未能连续地还原课堂行为[11],为此,本研究进一步绘制动态折线图,更直观地展现课堂中师生行为的动态变化,如图1所示。
情境导入环节(约前4分钟),师生行为主要发生在物理空间,虽然教师行为占比明显高于学生,但却随着情境的导入呈下降趋势,学生行为占比则在情境提问中逐步提高。可见,情境导入中,若融合启发性问题,更能引导学生主动学习与思考的行为。
模型演示环节(约第4—8分钟),师生在物理和虚拟空间均有了互动行为,但以教师虚拟空间演示为主,表现出教师行为为主的特征。
原理解析环节(约第8—13分钟),出现教师物理空间行为的高峰,教师结合多媒体课件解析智能模型中各元件的功能和原理,一定程度上忽略了学生的主体性。
流程分析环节(约第13—17分钟),出现师生行为分离的现象,前半程学生尝试在虚拟实验室通过拆解案例程序分析工作流程,呈现出学生虚拟空间行为为主;而后半程教师给出完整流程图讲解,呈现出教师物理空间行为为主。
动手实践环节(约第17—38分钟),师生的行为及交互主要发生在虚拟空间,学生行为占比整体上高于教师行为占比,并伴随师生操作交互行为。可见,完成虚拟仿真实践任务,有利于提升学生的参与度和主体地位。
拓展延伸环节(约第38—41分钟),教师结合图片和视频,拓展讲解人脸识别技术的其他应用场景,教师物理空间行为再次达到高峰;而学生虚实空间行为均逐步降为0,从虚拟实验环境切换到物理空间的视听行为,学生思维难以转换。
3.3 跨空间的互动行为特征
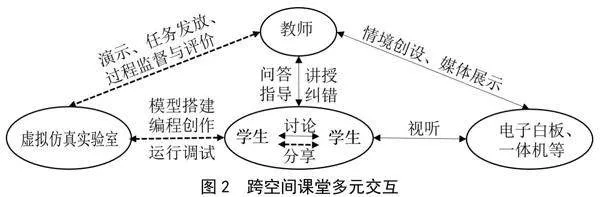
有研究表明,积极强化行为可以促进师生有效交互,提升学习效率[12]。课例编码分析显示(表4),教师物理空间发生的积极强化(编码E:教师表扬、鼓励或采纳学生观点)与消极强化(编码D、G、K分别代表教师批评或维护教师权威、学生被动应答和课堂纪律管理造成的混乱)的比例为2∶1。与此同时,课堂实录观察发现,教师对学生的积极强化主要表现为学生主动回答后的夸奖、学生应答遇到困难时的引导和鼓励,以及在虚拟实验室中教师的及时指导。由此可见,在跨空间的课堂中,物理空间的积极强化和引导有利于学生提升探究实践效率以及构建良好课堂氛围,从而提升教学效率。
聚焦虚拟空间的行为分析发现,虚拟空间的教学行为频次为324次,其中教师演示操作行为83次,发放或点评学生模型搭建或编程作业行为48次,操作交互36次,在整节课中共占比39.51%,充分体现了虚拟实验空间在人工智能面对面课堂中的补充作用。同时,课堂实录观察发现,各环节虚拟空间的学习与互动有效促进了学生的学习参与度。例如,在讲解技术原理时,教师结合虚拟仿真实验室进行演示,学生能直观地观察打卡机器人的模型构成和运行效果。动手实践环节,教师依据学生的学习进度,通过虚拟仿真实验室分层发放不同难度的实践任务,及时发现学生在任务探究中的问题并予以纠正,实现更精准的指导。
4 结果讨论与教学建议
4.1 结果讨论
4.1.1 设计视角:未体现跨空间优势的教学策略,会使学生主体地位受限
物理空间的师生行为频次比为2.58∶1,虚拟空间教师行为频次也略高于学生行为频次(接近1∶1),学生主体地位未能完全凸显。结合动态特征曲线可见,多个环节的教学策略均未能体现跨空间课堂的优势。例如,模型演示虽借助虚拟实验室进行,但学生仍是以视听行为为主,若将其设计为“拆一拆”的探究任务,学生将虚拟模型进行拆解后,借助平台对元件的注解完成主动学习,比被动的视听学习更有效。再如,原理解析环节从虚拟空间切换到物理空间,采取多媒体辅助讲解的策略,忽略了学生的先验知识;若采用类比法,并通过虚拟平台上“打卡机器人”示例运行,逆向推演各元件的功能原理,更能体现学生的深度认知加工过程。
4.1.2 交互视角:跨空间的多边交互,有利于提升学生参与度
从动态特征曲线可见,课例体现了跨空间的多重课堂交互,包括教师与虚拟仿真实验室、学生与虚拟仿真实验室、师生和生生面对面以及师生在虚拟平台的交互。比如,模型搭建演示,教师在虚拟空间进行拆解和组装,学生可边看边实践;编程实现机器人功能时,学生可在软硬实验室中切换,编写程序的同时进行运行调试;教师通过虚拟平台抛出问题或任务后,可在虚拟空间监测学生完成过程,面对面进行纠错和指导。学生在各教学环节不再是单纯的倾听者,均有一定程度的主动性,参与度提升明显。同时,该课例中师生交互中的积极强化是消极强化的两倍,课堂氛围和谐;教师设问时,学生面对封闭式问题响应积极,开放性问题沉寂时间较长,因此,在各类交互中,教师还应注意问题设计的合理性及与学生的情感交互。
4.1.3 实践视角:虚拟空间的多元实践,能促进探究与反思等高阶学习
课堂行为分析发现,在虚拟空间学生行为频次较高且操作交互行为远多于课堂沉寂。学生在虚拟仿真实验室收到教师下达的任务后,能积极展开探究,这一过程中学生操作交互行为频次与虚拟空间总体行为频次是成正比的。教师对学生的探究行为能进行过程监控、个性化纠错,也能将优秀作业实时分享在教室大屏上,引导学生反思、改进和优化作品。学有余力的学生还能进行任务进阶,将所设计的机器人功能升级。在这一过程中,学生既有自主实践探究,也有建立在同伴分享基础上的有效反思,高阶思维得以锻炼。
4.2 教学建议
4.2.1 优化教学模式,突出学习者为中心
人工智能课程有一定的工程实践性,内容包括模型搭建、原理解析、流程梳理、程序编写、调试运行等,在跨空间的课堂上,若不能合理安排教学流程,易因课时有限、课堂容量超负荷等原因,导致学生主体行为受限。为此,可借鉴适用于工程实践类课程的教学模式或框架,将学习内容有机融入各教学环节。例如:广泛应用于工程类课程的CDIO模式,在“项目构思(Conceive)→方案设计(Design)→转换实施(Implement)→运作展示(Operate)”四个环节中融入内容,有效调动学生主动性;BOPPPS参与式教学模型,按WliQrb4ZHN5XG85jMcQ2zw==照“情境引入,激发动机(Bridge-in)→目标设定,结果导向(Objective/outcome)→课前摸底,内容聚焦(Pre-assessment)→参与式学习,强化互动(Participatory Learning)→课后测验,检验结果(Post-assessment)→总结反思,巩固效果(Summary)”的流程,有效提升学生参与度。
4.2.2 合理设计多元交互,提升学生参与度
跨空间的课堂交互相较于传统课堂来说更为复杂,教师、学生、虚拟仿真实验室、教室电子白板或一体机等大屏之间均存在交互(图2)。在物理空间,师生之间以讲授、问答、指导、纠错互动为主,教师对学生进行提问与积极引导,并使用鼓励性的言语等正强化手段,能有效提升学生主动回答和反馈的行为频率;生生之间则以讨论、分享互动为主。在虚拟空间,学生能在虚拟仿真实验室中完成模型搭建、编程创作和运行调试等实践任务,且教师能进行过程监督与评价。由此可见,虚拟空间中基于实践任务的交互能有效提升学生的参与度,体现“做中学”和“学生为中心”的特征。
4.2.3 充分利用虚拟空间优势,促进学生高阶思维发展
相比于购置人工智能课程所需硬件设备,利用虚拟平台展开跨空间的教学是规模化、低成本支撑课程开设的最佳选择。在虚拟空间,学生收到教师下达的任务后能积极展开探究。同时,教师对学生的探究行为能进行过程监控、个性化纠错,通过实时分享优秀作品引导学生反思,改进和优化自己的作品。学有余力的学生还能挑战将所设计的机器人功能升级,使高阶思维得到锻炼。
5 结束语
本研究在前人研究的基础上,结合人工智能课程特色,设计了跨空间人工智能课堂互动行为分析系统(CSAI-IAS),并选取广州市八年级“打卡机器人”公开课为研究课例,探讨分析目前人工智能课程教学过程中面临的问题。
研究发现,物理空间与虚拟空间相融合的跨空间人工智能课能够实现教师、学生、平台之间的跨空间多重交互,大大提升学生参与度,虚拟空间的多元实践能有效促进学生进行探究与反思等高阶学习;但也容易因教学策略使用不合理,在课时有限、课堂容量超负荷的情形下,使得学生主体地位受限。为此,研究提出借鉴CDIO、BOPPPS等工程实践类教学模式进行流程优化;合理设计跨空间系统中的多元交互,提升学生参与度;充分利用虚拟空间优势,促进学生探究、批判、沟通、反思等高阶思维发展。
总之,物理空间和虚拟空间相融合的跨空间人工智能课堂教学是我国人工智能教育普及的可行路径之一,在提升学生学习效率、参与度、主动性等方面均有一定的优势。
6 参考文献
[1] 董伟,张美,高晨璐,等.基于用户体验的在线教育平台学习效果影响因素研究[J].中国远程教育,2020(11):68-75.
[2] 张屹,祝园,白清玉,等.智慧教室环境下小学数学课堂教学互动行为特征研究[J].中国电化教育,2016(6):43-48,64.
[3] Arkorful V, Abaidoo N A. The role of e-learning, the advantages, and disadvantages of its adoption in Higher Education[J]. International Journal of Instructional Technology and Distance Learning, 2015,12(1):29-42.
[4] 毛露甜,卢庆武,段中岗.基于Moodle平台的“微生物学”混合式教学模式探讨[J].教育现代化,2020,7(39):89-93.
[5] 张伟民,梁凯文,王洋.基于Unity3D与模块化教学机器人平台的课程改革实践:以中小学机器人课程为例[J].中国电化教育,2022(3):119-126.
[6] 李利,梁文洁,薛锋.智慧教室环境中的课堂互动教学现状分析:基于小学数学课堂教学个案的研究[J].电化教育研究,2018,39(3):115-121.
[7] 李中旗,文灿,高士娟,等.高校师生对可视化教学支持平台的接受度研究[J].现代教育技术,2021,31(5):97-103.
[8] Flanders N A. Intent, Action and Feedback: A Preparation for Teaching[J].Journal of Teacher Education,1963,3(14):251-260.
[9] 顾小清,王炜.支持教师专业发展的课堂分析技术新探索[J].中国电化教育,2004(7):18-21.
[10] 方海光,高辰柱,陈佳.改进型弗兰德斯互动分析系统及其应用[J].中国电化教育,2012(10):109-113.
[11] 邹晓宇,唐章蔚.基于IFIAS的信息化课堂互动行为研究:以一节部级优课为例[J].中国教育技术装备,2023(1):113-117.
[12] 韦怡彤,王继新,赵晓娜,等.同步互动专递课堂中教学互动行为案例研究:以一年级美术课“画马路”为例[J].现代教育技术,2019,29(12):41-47.
*项目来源:教育部人文社会科学研究项目“专递课堂强交互教学模式创新与实证研究”(基金编号:22YJA880048)。
作者简介:田俊,博士,副教授,硕士生导师。
