汽车LED前照灯控制系统及方案优化设计
2024-09-25万国义兰金耀余传杰莫仕沾





【摘 要】随着LED前照灯复杂度、集成度及智能化程度的不断提高,汽车LED前照灯控制系统面临着简化设计、提高效率和降低成本等诸多挑战。针对目前的现状,文章提出一种集成近光、远光、角灯的LED前照灯控制系统,并着重对该控制系统的关键参数、芯片参数和方案进行新探索、设计和优化,可实现汽车前照灯的精准控制,使之具有高驱动效率、低能耗、高集成度、高性价比的优点。在汽车LED前照灯控制系统的电路设计和元器件选型等领域,具有重要的指导意义和较高的应用意义。
【关键词】LED前照灯;控制系统;芯片;瞬态浪涌功率;电感值
中图分类号:U463.65 文献标识码:A 文章编号:1003-8639( 2024 )09-0041-03
The Optimization Design of Automotive LED Headlamp Control System and Scheme
WAN Guoyi,LAN Jinyao,YU Chuanjie,MO Shizhan
(SAIC GM Wuling Automobile Co.,Ltd.,Liuzhou 545007,China)
【Abstract】With the continuous improvement of LED headlamp complexity,integration and intelligence,automotive LED headlamp control system is facing many challenges such as simplifying design,improving efficiency and reducing cost. In view of the current situation,this paper proposes an integrated low light,high light,Angle light LED headlight control system,and focuses on the key parameters of the control system,chip parameters and schemes for new exploration,design and optimization,which can realize the precise control of automotive headlights,so that it has the advantages of high drive efficiency,low energy consumption,high integration,high cost performance. In the field of circuit design and component selection of automotive LED headlight control system,it has important guiding significance and high application significance.
【Key words】LED headlight;control system;chip;transient surge power;inductance value
随着汽车智能化程度的不断提高及汽车技术的不断发展,LED前照灯在汽车上的应用越来越普及,各方对夜间行车安全的重视程度也在不断加强,促使人们对汽车LED前照灯的要求也不断提高,而夜间汽车前照灯的亮度、照射宽度、照射距离等都关系到夜间行车的安全。因此,人们对汽车前照灯的要求由原来只需满足基本的法规要求转变为要求汽车前照灯需照得宽、照得远且性价比高。要满足人们对汽车前照灯性能的需求,汽车LED前照灯就必须具备更多颗数的LED,这会造成汽车前照灯的功率急剧加大,因而如何设计一种高驱动效率、低能耗、高集成度、高性价比的LED前照灯控制系统来驱动和控制LED的点亮已成为LED前照灯领域的研究热点。
诸多专家学者对大功率LED前照灯控制系统的方案设计和关键电路进行了研究,研究表明LED前照灯的控制系统必须输出恒定的电流才能保证LED前照灯正常稳定工作[1-3]。马永胜[4]对LED前照灯驱动硬件进行设计和研究,并进行关键元器件的选型,其研究结果表明,该驱动系统可以对大功率LED前照灯进行控制,并且具有较高的驱动效率,达到86%。刘攀[5]等人对LED前照灯的芯片选型、EMC设计进行了介绍,其研究成果为LED前照灯控制系统的设计提供了指导。
尽管诸多专家学者对大功率LED前照灯控制电路进行了设计及研究,但仍然存在驱动效率不高、集成度不高的问题,不能实现采用一颗芯片就可以控制近光、远光、辅助远光、角灯的点亮。本文基于单一芯片采用DC-DC升压技术实现对近光、远光、角灯的控制,并对该控制系统的关键参数、芯片参数和方案进行设计优化和研究。
1 LED前照灯控制系统方案
LED前照灯控制系统关系着整个LED前照灯能否正常运行及运行效率。本研究将从以下两个方面介绍LED前照灯控制系统的方案。
1.1 LED前照灯与整车的控制逻辑及通信架构
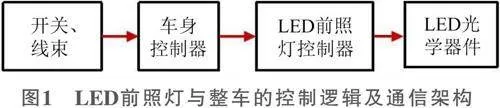
LED前照灯与整车的控制逻辑及通信架构主要由开关、车身控制器、线束、LED前照灯控制器、光学器件5个部分组成。其中LED前照灯控制器采用硬线与车身控制器进行电气连接和通信。当开关切换至近光挡时,将近光开启信号传递给车身控制器,车身控制器接收到近光开启信号后,将稳定的12V电压输给LED前照灯控制器,LED前照灯控制器经过内部电路处理后给近光LED颗粒提供稳定的电压和电流,从而点亮近光。当开关切换至远光挡时,将远光开启信号传递给车身控制器,车身控制器接收到远光开启信号后,将稳定的12V电压输入给LED前照灯控制器,LED前照灯控制器经过内部电路处理给远光LED颗粒和近光LED颗粒提供稳定的电压和电流,从而点亮远光。当车辆发动机启动或处于Ready挡,且车辆速度小于40km/h时,车身控制器接收到车辆开启转向灯或方向盘转角大于45°的信号后,将稳定的12V电压输入到LED前照灯控制器,LED前照灯控制器经过内部电路处理给角灯LED颗粒提供稳定的电压和电流,从而点亮角灯。LED前照灯与整车的控制逻辑及通信架构如图1所示。
1.2 LED前照灯控制系统架构
LED前照灯控制系统主要包含输入保护、输入滤波、输入欠压保护、输入过压保护、升压回路、输出滤波、近光切换、远光切换、角灯切换、LED颗粒等。LED前照灯控制器通过硬线与车身控制器进行电气连接和通信,将车身控制器提供的电压经过芯片升压处理后给近光LED、远光LED、角灯LED提供稳定的电压和电流,从而控制前照灯近光、远光、角灯的点亮,其控制原理如图2所示。
2 LED前照灯控制系统电路设计
LED的亮度随着流过的电流大小变化,因此要保持LED的亮度不变就必须为LED提供恒定的电流。本文采用DC-DC恒流芯片为LED提供恒定的电流。
2.1 LED驱动及控制芯片选择
LED前照灯控制系统部分原理如图3所示。LED前照灯控制近光、远光、角灯的点亮,总共需要驱动点亮16颗LED,每颗LED的驱动电压为3V,电流为1A,16颗LED均采用串联的方式,因此芯片的输出电压必须大于48V,输出电流大于1A。车身控制器输入给LED前照灯控制器的电压范围为9~16V,纹波电压为400mV,工作频率为800kHz。但整车的工况复杂,其他用电器及外界环境也会对LED前照灯控制器产生干扰和影响,因此芯片的输入输出参数要求必须满足表1的要求。本研究选择的芯片型号为ICL8332A,可满足要求。
2.2 LED前照灯控制系统主要参数计算
2.2.1 TVS管最大瞬态浪涌功率计算
经计算,TVS管的最大瞬态浪涌功率>413W,结合汽车LED灯具的电源线浪涌电压要求,因此本研究选择最大浪涌功率为600W(10/1000μs标准波)以上的TVS管,寿命>10年,工作温度范围为-45~125℃。本研究实际采用的TVS为SMBJ30CA。TVS管选型参考式(1)~(4)进行。
(1)
(3)
(4)
式中:VRMW——最大反向工作电压;VC-max——最大箝位电压;VBR——反向截止电压;Pact——最大瞬态浪涌功率。
2.2.2 占空比计算
LED前照灯控制器的占空比可以通过式(5)、式(6)进行计算。
式中:Dmin——最小占空比;Dmax——最大占空比;VOUT——最大输出电压;VIN-max——最大输入电压;VIN-min——最小输入电压。
2.2.3 电感的电感值计算及电感选择
电感的峰值纹波电流为LED前照灯输出电流的0.3倍,则电感值可以按照式(7)、式(8)进行计算。经计算,电感的最小电感值为25.8μH。
式中:ILrip-max——电感的峰值纹波电流;IOUT-max——最大输出电流;Lmin——最小电感值。
2.2.4 输出电容计算及电容选择
输出电容的波电流为LED前照灯输出电流的0.15倍,且所选用的LED动态阻抗为0.2Ω,因此16颗LED的总阻抗为3.2Ω,则输出电容的纹波电压为:
(9)
(10)
式中:Vripple-OUT——纹波电压;COUT——输出电容。
3 优化设计及测试结果
LED前照灯控制系统在设计完成后,为保证整个控制电路稳定、可靠运行,需要对每个电路的关键节点进行测试,同时需要对每个元器件的参数进行优化设计。本研究截取部分测试结果进行阐述。
3.1 LED切换回路优化设计
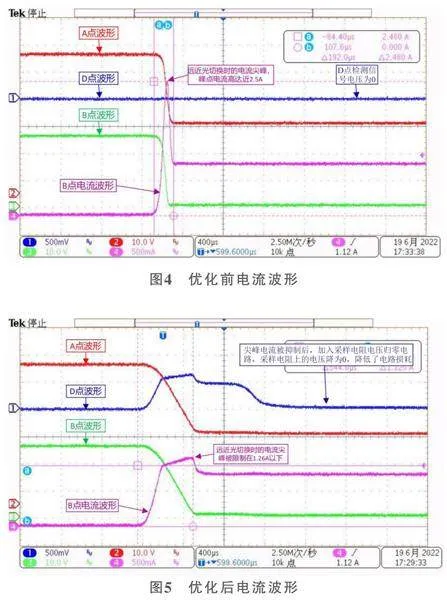
LED前照灯控制系统在控制近光、远光、角灯点亮后,经过控制芯片的升压,将会产生48V甚至更高的电压。然而当只点亮近光时,电压只有21V,此时由于电压的突变会导致切换回路产生很大的浪涌电流,该电流流过LED时会对LED产生损害,时间过长会影响LED的寿命。本文采用电容C13将该浪涌电压耦合到三极管的基极,控制三极管的动态导通和关闭,从而实现MOS管的栅极与源极间呈可变电阻,其阻值随着浪涌电压的增大而增大,最终使浪涌电压被消耗,继而使浪涌电流被消耗。经过实际计算和优化设计,当C13的容值为220nF,R53为51kΩ时,浪涌电流最小且远光、近光、角灯可正常切换。优化前,远近光切换时近光LED的峰值电流达到2.5A,优化后降低到1.26A,降低了49.6%,如图4、图5所示。
3.2 测试结果
利用可调恒流电源在25℃、50%的环境下对LED前照灯控制系统的输入和输出参数进行测试,测试结果表明,该控制系统在6.5~25V的输入电压范围内,均能输出1A的稳定电流,输出电压可达到65V,可驱动16颗3W LED的点亮。其在9~16V时的输入电压与输出电流的关系如表2所示。测试结果表明,当输入电压在12以上时,输出电流可保持在1A以上。
4 结论
本文基于单一芯片采用DC-DC升压技术实现对集成了近光、远光、角灯的前照灯的控制和点亮,并对该控制系统的关键参数、芯片参数和方案进行了研究和设计优化,并得出以下结论。
1)对控制器的占空比、电感值、电容值进行了设计计算和优化设计,得出最大占空比为0.865,电感值为25.8μH,输出电容值为3.1μF。
2)优化前尖峰电流达到2.5A,优化后尖峰电流只有1.26A,尖峰电流降低了1.24A。
3)当输入电压在12V以上时,输出电流保持在1A左右。
参考文献:
[1] 张强,景占荣,温鹏,等. 汽车LED照明灯驱动系统的设计与仿真[J]. 电源技术,2012,36(10):1565-1567.
[2] 王钦若,李志民,刘清详,等. 无大电解电容的大功率LED驱动电源的设计[J]. 半导体光电,2013,34(6):1082-1085.
[3] 司小平,蔡艳艳,常怡金. 一种大功率汽车LED前灯驱动电路的设计[J]. 控制工程,2016,23(6):911-914.
[4] 马永胜.一种LED汽车前照灯的电路驱动设计及实现[J]. 中国电子科学研究院学报,2015,10(3):321-326.
[5] 刘攀,雷旭,初翔杰,等. 汽车LED前照灯驱动电路设计方案[J]. 时代汽车,2018(13):128-130.
(编辑 凌 波)
作者简介万国义(1990—),男,工程师,主要从事汽车灯具技术研究工作。
