车载毫米波雷达BSD功能系统的应用与设计
2024-09-25魏秋洋林湖陈力军朱峰



【摘 要】毫米波雷达BSD系统是一种将双角雷达置于车身2个尾角进行盲区监测和目标感知的高级辅助驾驶方案,是一种低成本的自动泊车以及变道辅助方案。本文设计一种BSD控制策略,在实车道路测试中得到可靠的验证,网络通信设计基于CAN总线对此雷达BSD系统进行整车通信和交互设计。
【关键词】毫米波雷达;自动泊车;BSD;CAN通信
中图分类号:U463.675 文献标识码:A 文章编号:1003-8639( 2024 )09-0026-03
Application and Design of BSD Functional System for Vehicle Mounted Millimeter Wave Radar
WEI Qiuyang,LIN Hu,CHEN Lijun,ZHU Feng
(China Automotive Innovation Co.,Ltd.,Nanjing 211100,China)
【Abstract】The millimeter wave radar BSD system introduced in this article is an advanced assisted driving solution that places dual angle radars at the two rear corners of the vehicle for blind spot monitoring and target perception. It is a low-cost automatic parking and lane changing assistance solution. A BSD control strategy is designed,which has been reliably verified in actual vehicle road tests. The network communication design is based on CAN bus for vehicle communication and interaction design of this radar BSD system.
【Key words】millimeter wave radar;automatic parking;BSD;CAN communication
随着汽车智能化和网联化的发展,高阶辅助驾驶功能逐渐完善和普及,有无高级驾驶辅助系统ADAS和自动泊车功能决定着高低端车型划分。而毫米波雷达作为一款低成本、适应性高的传感器,用于盲点监测系统BSD开发具有无可替代的优势,在自动泊车、盲区监测、变道辅助上带给驾驶员更好、更安全的用车体验,避免了不必要的交通事故、人员伤亡和经济损失,已经成为ADAS必不可少的选择。
1 应用场景
1.1 自动泊车
车后部搭载2颗毫米波雷达对盲区探测,融合摄像头数据做自动泊车规划设计,实现完全脱离驾驶员干预的自动泊车功能,打造高阶辅助驾驶功能。
1.2 盲区监视和变道辅助
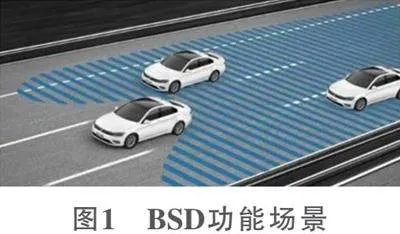
如图1所示场景,通过2颗毫米波雷达实时监视驾驶员视野盲区,并在规定盲区内出现其他道路使用者时发出警告;在车辆变道过程中,检测车辆侧方或者后方出现可能发生碰撞危险的信号[1]时及时发出报警,避免不必要的事故。
2 设计要求
BSD功能毫米波雷达布置在车辆后部2个角上,并且采用主从式设计,其中一颗雷达集成控制器与整车通信,另一颗雷达仅与主雷达通过私有CAN进行通信,如图2所示。毫米波雷达传感器在搭载整车时,需要考虑电磁兼容性与DV环境试验以及满足相应的功能安全、信息安全等级认证,选用车规级器件设计。软件实现采用AUTOSAR软件架构进行开发,确保软件可靠性,要具备OTA升级功能为后续APP升级预留空间。设计时,需要考虑维修拆卸方便、雷达安装角度和稳固性、运行噪声、使用寿命和最坏情况分析,尽可能减少故障。考虑到监控处理对实时性要求比较高,需要采用CAN FD进行设计,满足高标准的ADAS使用要求。
3 设计实现
3.1 天线布阵及PCB工艺
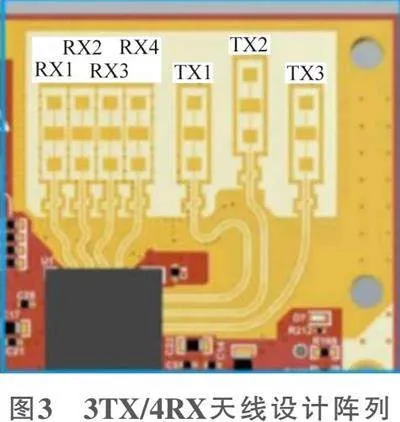
采用77GHz先进CMOS工艺,可提供高达4GHz的宽扫频带宽,显著提高距离分辨率和精度。对于相同的天线视场和增益,77GHz天线阵列[2]尺寸在X和Y维度上减小约3倍,易于安装,较高的射频频率可以在相同尺寸天线和传感器上提供更窄的波束,从而减少干扰,图3为3TX/4RX天线设计阵列。CMOS工艺整体造价下降40%,集成度更高,RF芯片的占比下降,降低雷达模块设计复杂度,加速开发周期。
天线、射频、基带和控制处理决定着毫米波雷达性能好坏,前端射频芯片主要负责毫米波信号的调制、发射、接收和回波信号的解调,天线高频PCB板需要在较小的集成空间保持足够的信号强度,难度较高,目前由少数国外公司掌握该项技术。
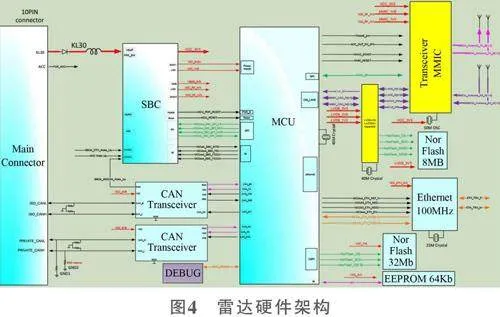
3.2 硬件设计
雷达硬件架构如图4所示。负责中央控制的芯片是国产雷达专用MCU,对标NXP系列芯片,具有3个核C0、C1、C2。C0主核带锁步功能,250MHz,C1、C2是2个辅核,500MHz,4路SPI,2路SAR ADC,3路CAN FD,2路MIPI CSI-2,2.5M Code RAM,3M Data RAM。工作温度范围为-40~+150℃,符合AEC-Q100要求,满足ISO 26262 ASIL D等级认证。负责CAN网络通信芯片选型是NXP的TJA1043、TJA1042,作为高速传输(最大支持5Mbit/s)并且有Standby、Sleep模式,完全满足ISO 11898-2:2003,ISO11898-5:2007标准和通过AEC-Q100认证。选用100M带宽以太网用来做数据采集分析。电源管理芯片FS8430满足ASIL B等级,具有独立的安全监控单元[3],可达最大60V直流输入电压,待机关闭模式下,睡眠电流低至10μA,整体工作功率可以控制在3W左右。MMIC射频芯片为自研产品,性能几乎与TEF8102相当。主控芯片强大的处理能力和丰富的资源可以满足雷达点云和航迹数据实时输出,ADAS预警功能都可以达到ms级别,提高了设备在各种复杂路况以及极端天气或者高速行驶等场合的适应性。
3.3 软件设计
软件设计采用第三方公司基础软件工具开发生成符合AUTOSAR架构的BSW、MCAL相应代码,根据整车客户要求编写APP层,包括BSD功能[4-5],并且后期可以进行OTA升级。
3.3.1 软件标定设计
软件设计时还需要充分考虑标定功能[6],雷达在车辆的安装位置也直接影响到盲区监测系统的性能优劣。分为下线标定和在线标定环节,前期将雷达放置在固定车身支架上,进行角度和高度标定。
1)RR:右后安装,Y=1m,Pitch=±1°,Yaw=45°,Height=460mm。
2)LR:左后安装,Y=-1m,Pitch=±1°,Yaw=45°,Height=460mm。
应确保雷达安装角度在误差允许范围±1°内,否则应进行在线标定以消除雷达角度误差,确保雷达工作在最佳状态。需要满足以下条件:①免调整范围±4°方位;②以特定速度直线行驶60~110km/h;③护栏策略基于检测的连续直线静态目标;④计算所得护栏与行车方向的夹角用于校准下线标定误差。
3.3.2 BSD控制设计
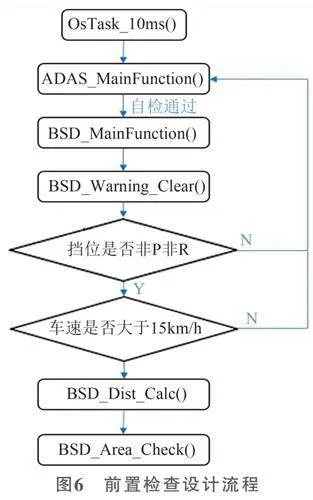
1)前置条件:①本功能适应本车车速范围大于15km/h;②盲区检测系统功能开启,在非P非R挡位,系统启动,车速大于15km/h时,系统激活;③目标车辆满足告警条件开始到发出告警的系统响应时间小于300ms。
2)功能指标:①BSD检测范围如图5所示;②域宽为4.5m;③车尾处3.5m+车速×扩展系数,扩展系数初始定义为0.05;④蓝色区域为报警检测区域,进入该区域才报警,否则不予处理;⑤报警及分级,目标物进入BSD报警区域,且未打转向灯时,系统进行一级报警,否则进行二级报警;⑥误报及漏报指标,报警准确率≥98.9%,综合工况(2500km)20%城市道路,40%一般道路,30%高速道路,10%山区道路。
3)软件流程:前置检查设计流程如图6所示,告警决策设计流程如图7所示。
3.3.3 CAN通信设计
ADAS功能一个比较重要的方面是在本身控制决策方法设计的好坏,另一个比较重要的方面是CAN通信设计,要能及时上报告警避免不必要的事故。车速、挡位、雷达状态以及告警信息等都需要结合整车CAN通信[7]来设计雷达传感器CAN网络。表1为雷达CAN ID分配情况,表2为CAN ID信息状态。
通过消息Radar_Cfg(0x100)配置前向/角向雷达传感器参数,参数可以单独更改,也可以一次同时更改多个。对于每个参数,消息包含一个有效位。如果有效位设置为valid(0x1),则在前向/角向中更新相应的参数,否则将忽略本次参数配置。
Radar_State(0x200)消息由传感器定期(每秒一次)输出。对雷达配置参数进行配置后,可以通过检查随后的0x200消息中的相应信号,以确认雷达已接受配置更改并生效。
消息Point_Status(0x300)包含Point目标列表头信息,作为Point目标列表输出的第1条消息,并且Point模式下每个雷达测量周期仅输出一次。
目标一般信息(0x400)包含Point目标的位置、速度和角度等信息,并针对所有检测到的Point目标周期性输出(先近后远)。如果超过256个Point目标,则只输出前256个Point目标。约9ms可以发送完256个目标。
消息Object_Status(0x600)包含Object目标列表头信息,作为Object目标列表输出的第1条消息,并且Object模式下每个雷达测量周期仅输出一次。
目标一般信息(0x700)包含Object目标的位置、速度信息,并针对所有跟踪的Object目标周期性输出。
4 结束语
毫米波雷达具有高穿透、全天候、环境适应性强的特点,在汽车领域已经获得了不可替代的地位,未来市场占有率逐步提高,复合增速稳步增加。在ADAS系统中,雷达仍然是主要传感器。但由于国际上长期存在芯片封锁、开发难度高和工艺要求高等局限性,国产雷达还需努力。本文所涉及技术都是自主开发,为国产化替代方案,确保后期稳定供货,为“中国芯”贡献一份力量。
参考文献:
[1] 徐燕,肖红,袁新. 基于毫米波雷达的智能车辆主动避障控制系统设计[J]. 计算机测量与控制,2024,32(6):78-84.
[2] 李泽丕,李春树,李佳宁,等. 基于压缩感知的自适应再选择毫米波信道估计[J]. 计算机仿真,2022,39(8):222-225,295.
[3] 吴大用,赫兰光,赵瑜东,等. 复杂场强下智能光强度测试监控系统研究与应用[J]. 汽车电器,2023(9):66-69.
[4] 王金生,江城城,陈风月. 基于毫米波雷达在汽车尾部盲区中的应用研究[J]. 汽车与配件,2023(12):66-68.
[5] 梁煜. 基于毫米波雷达的汽车变道辅助系统研发[D]. 长沙:湖南大学,2018.
[6] 仲正,宋小军. 基于ADAS平台的下线标定系统设计与实现[J]. 计算机测量与控制,2022(10):148-154,161.
[7] 冯世杰,焦红星,王艳芳. 纯雷达自动泊车系统的网络通信设计[J]. 汽车电器,2023(9):10-13.
(编辑 杨凯麟)
作者简介魏秋洋(1990—),男,高级工程师,硕士,主要从事汽车电子系统开发工作。
