全地形救援设备研究及发展趋势
2024-08-05曾恩

摘要:全地形救援设备是一种能够在多种事故及自然灾害中快速进行救援的设备,被广泛应用于探查、搜寻、救援等多个领域,可以有效缩短救援时间,提高救援效率,减少事故灾害中的人员伤亡和经济损失。文章分析当前国内外现有救援设备行走机构的设计及其应用场景,认为目前的救援设备适用范围有限,并且在复杂工况下难以保证其操控的灵活度和精准性。因此,有必要采用远程驾驶方式,将人的主动性融入救援设备中,以提升其应对复杂环境的能力。
关键词:全地形;救援设备;远程驾驶
中图分类号:TP24" " " 文献标识码:A" " " 文章编号:1674-0688(2024)04-0100-03
0 引言
近年来,极端天气事件频发,导致灾害的风险系数不断提高,灾害的复杂性日益加剧,每次事故灾害的发生都带来巨大的人员伤亡和财产损失。因为事故无法预测,救援面临的是“全地域”“全灾种”的综合性救援工作,所以救援作业的区域存在较大的风险[1]。以天津港爆炸火灾事故为例,遇难的165人中,有110名是救援人员[2]。目前,救援工作的难点在于灾难和事故发生后,现场的具体情况不明确,阻碍了搜救工作的顺利开展,而且传统的救援设备需要现场操作,难以适应复杂多变的地形,使救援人员面临巨大的安全风险。
现有针对救援机器人的研究主要聚焦于功能模块搭载、智能算法优化、信息采集能力提升及救援设备结构性能改进等方面,但当前救援机器人仍存在防水和越障功能不足、移动和转向不灵活、环境感知能力和智能算法水平不高等问题[3],在当前救援设备智能化水平较低的情况下,其无法自主完成搜救任务。因此,借助远程驾驶技术操控救援设备,实现人机结合应用,是解决当前设备智能化水平不足的有效方式。远程驾驶技术的应用对救援设备的适用性能要求很高,救援的情形有地质自然灾害、火灾、野外救援以及化学危险品灾害,现场的地形包括陡坡、塌陷、崎岖、狭窄等非结构化环境路况[4]。因此,研发一种能在全灾种、全地形的环境中快速越障的行走机构和运动平台,具有提高灾害处置能力和救援效率、减少人员伤亡和经济损失的重大现实意义[1,5]。本文梳理全地形救援设备的研究及发展趋势,综述当前救援设备的行走机构类型及应用场景,旨在为全地形救援设备的设计研究提供参考。
1 国内外研究现状
1.1 国外救援设备研发与应用现状
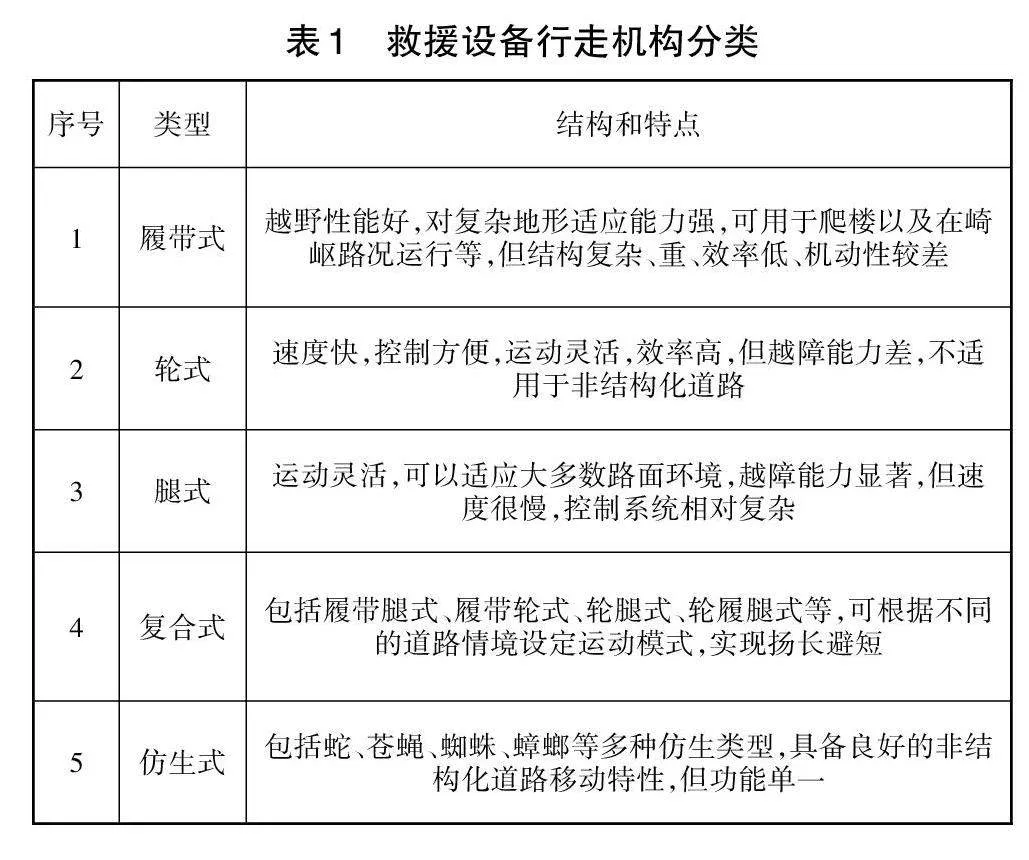
自“9·11”事件美国首次将机器人应用于搜寻幸存者,此举引发了全球对救援设备重要性的认识。《时代周刊》报道,在此次救援中,救援机器人在10天内于狭小、危险的区域中搜救的遗体数量与人工搜救相当,但效率却提高了1倍[6]。此后,救援设备的研发进入了快速发展阶段。到目前为止,救援设备已经开发出多种类型,按照其行走机构的类型可以分为履带式、轮式、腿式、复合式以及仿生式机器人,救援设备行走机构分类见表1。
国外应用救援设备较早,图1(a)所示的履带式救援移动装备为英国奎奈蒂克公司北美分公司研制的魔爪军用机器人,该机器人采用遥控控制方式,可以搭载多种组件,执行拆除简易爆炸装置、侦察等任务,其他履带式移动救援设备还有美国Remotec公司研制的V2机器人,加拿大InvKtun公司研制的MicroVGTV机器人等[7]。图1(b)所示的轮式救援移动设备为美国桑地亚国家实验室智能系统和智能机器人研究中心研发的RATLLER机器人[8],该机器人采用的轮式行走机构,由4个驱动轮构成,具有较强的机动性能,行驶速度较快,可实现远程控制,但其越障性能较差,只适合在平坦的地形中行驶,此类轮式移动救援设备还有美国卡内基·梅隆大学研制的Groundhog救援机器人等。图1(c)所示的腿式机器人为东京工业大学的远藤玄研制的四腿机器人,该机器人在崎岖路面也能自由行进,还能上下台阶,在房屋坍塌的受灾现场等非结构化路面上可自如行走,帮助搬运救援物资和执行现场搜救任务[9]。此外,卡内基·梅隆大学研制的八足机器人可以适应多种极限道路工况。图1(d)所示的轮腿复合式机器人是美国波士顿动力公司研制的Handle机器人,其底部采用车轮的方式并在支撑处结合腿的方式进行运动,车轮的运动方式保证车辆能快速行进,两轮的结构使其具有良好的转弯性能,因其支撑的腿部关节的运动具有弹性,可保证机器人在上下坡时像人一般稳定行进[10]。图1(e)所示的腿履复合机器人为美国维克那机器人公司研制的BEAR救护机器人,该款机器人将腿和履带结合在一起,其履带既可以起行走的作用,也可以改变机器人身躯的关节结构,实现类似于腿的动作,从而具备跨越不同地形的功能。其他复合式救援设备还有美国iRobot公司生产的Packbot系列机器人[11],该类型的机器人在两边的履带上加上摆臂,摆臂可以将机器人支撑起来,从而实现跨越台阶的功能。图1(f)所示为日本东北大学研发的仿蛇形机器人,该救援机器人采用振动马达获得动力,可根据空气喷射的方式调整位置,其突出的优点是可以穿越狭窄的间隙[12]。其他的仿生式救援设备还有美国加利福尼亚大学设计的苍蝇仿形机器人、蟑螂仿形机器人等。
综上,国外救援机器设备的研发技术已经较为成熟,在机构方面的变形种类和拓展非常丰富,并且许多机器人已经开展应用,得到了良好的反馈。
1.2 国内救援设备研发成果与进展
国内研发救援设备相较于国外虽然起步较晚,但是研发成果也相当丰富。中国矿业大学长期对煤矿井下开采环境进行分析,研制了履带行走的CUMT系列救援机器人,并在此基础上,进一步优化机器人的视觉技术、智能控制系统、行走机构以及环境识别自主避障功能等,研发的救援机器人已经有较好的应用[3,8,13-14]。刘罡[15]研制多节串联多履带构型的救援机器人,对其结构特性和运动策略展开了研究。王继斌[16]研究应用于地震废墟狭窄空间中的救援机器人。孙霖[17]研究城市灾害中携带救援臂的救援机器人,不断拓展救援机器人的应用范围以及功能。贾现军[18]对救援机器人在水下调整姿态位置的方式进行仿真试验研究,运用深度控制算法提高控制精度并减少了运行时的干扰。龙建成等[19]研制了可在水下进行救援的机器人,该机器人采用6个3叶螺旋桨作为动力,具备水下拍摄和人机交互功能,并且通过机械臂实现水下救援的目的。栾宪超等[20]研制了应用于废墟环境的蛇形救援机器人,通过算法优化设备结构参数,使其具备良好的跨越台阶、沟壑的能力,并且减少了设备的运行误差。寇彦芸[21]对七自由度冗余机械臂进行运动学分析求解和仿真,提高了机械臂的负重功能和作业空间。国内学者对救援机器人的研究虽然具有良好的理论基础,但是实际应用案例还较少,需要进行更多的实例验证分析,才能更好地为救援、救灾行动提供辅助。
2 市场预测和发展趋势
2.1 救援设备发展趋势与特征
近年来,国家对应急能力体系进行了全面的建设,先后推动实施了自然灾害防治技术装备现代化工程和安全应急装备创新发展工程。高效精良的技术装备是实施高质量科学救援的有力保障,加快推进抢险救灾工程机械研发制造对提升应急救援能力具有重要意义。
从当前各种灾难救援的现场情境和道路环境看,救援设备的发展趋势更多地往智能化、轻型化、模块化的方向发展,并具备通用化、多功能化的特征[1,4-5]。在国家政策的大力支持下,未来救援机器人的应用将拓展到水下、煤矿、自然灾害、火灾、化学危险物品、高层建筑等多个领域,研究内容既包括硬件技术上的传感性能、结构设计、设备功能,也包括软件技术上的智能算法、虚拟与现实技术结合、控制系统研发、定位导航等。
2.2 救援设备发展展望
在政策的推动下以及技术快速发展的推动下,救援设备的研发和应用将会得到更多的重视,对设备功能的要求也会不断提高,研制一种能适用于全地形的救援车辆,对救援救灾工作具有重大的现实意义,其市场空间必定广阔。
3 结语
当前,救援设备的行走机构已经出现履带式、轮式、腿式、复合式以及仿生式机器人等多种类型,其智能控制程度和相关分析理论也在不断提升,但目前适用场景往往有限,一方面受制于行走机构对各种复杂地形的自适应能力,另一方面受制于复杂地形带来感知运算的不确定性。因此,通过远程驾驶的方式与全地形救援设备进行结合,可以有效应对非结构化地形的救援行动。
4 参考文献
[1]薛凯,黎明.未来3~4年消防车辆及抢险救灾工程机械面临机遇期[J].商用汽车,2019(Z1):84-86.
[2]尤嵩菀,李功淼,沈同强.浅谈无人化装备在抢险救灾中的运用——对两起特大爆炸事故救援的反思[J].中国应急救援,2019(5):56-59.
[3]王勇.煤矿救灾机器人井下可视导航技术研究[D].徐州:中国矿业大学,2018.
[4]张新,徐建华,陈彤,等.面向重大自然灾害的救援装备研究现状及发展趋势[J].科学技术与工程,2021,21(25):10552-10565.
[5]于振中,蔡楷倜,刘伟,等.救援机器人技术综述[J].江南大学学报(自然科学版),2015,14(4):498-504.
[6]苏卫华,吴航,张西正,等.救援机器人研究起源、发展历程与问题[J].军事医学,2014,38(12):981-985.
[7]贾硕,张文昌,吴航,等.救援机器人研究现状及其发展趋势[J].医疗卫生装备,2019,40(8):90-95,100.
[8]刘建.矿用救援机器人关键技术研究[D].徐州:中国矿业大学,2014.
[9]杜威.四足机器人步态设计与运动控制研究[D].南京:南京航空航天大学,2018.
[10]杨琨.液压驱动四足机器人能耗分析、优化及动力系统研究[D].济南:山东大学,2019.
[11]YAMAUCHI B M.Packbot:a versatile platform for military robotics[C]//Conference on Unmanned Ground Vehicle Technology VI;20040413-20040415;Orlando,FL;US,2004:228-237.
[12]王国彪,陈殿生,陈科位,等.仿生机器人研究现状与发展趋势[J].机械工程学报,2015,51(13):27-44.
[13]翟国栋,张文涛,岳中文,等.基于双目视觉技术的煤矿救援机器人研究进展[J].煤炭科学技术,2020,48(7):206-217.
[14]李雨潭.多驱动煤矿救援机器人行走系统与驱动模式自适应控制研究[D].徐州:中国矿业大学,2018.
[15]刘罡.多节履带式搜索机器人及其运动策略研究[D].哈尔滨:哈尔滨工业大学,2011.
[16]王继斌.废墟狭窄空间辅助救援机器人研究[D].哈尔滨:哈尔滨工业大学,2014.
[17]孙霖.携带机械臂的履带救援机器人设计与仿真实验研究[D].哈尔滨:哈尔滨工业大学,2020.
[18]贾现军.小型水下救援机器人位姿控制及其在水下搜救中的应用[D].杭州:浙江大学,2014.
[19]龙建成,彭彬烘,田秀云,等.水下救援机器人的设计与实现[J].电子制作,2022,30(7):30-32.
[20]栾宪超,常健,王聪,等.主动关节履带式蛇形救援机器人结构参数多目标优化设计[J].机器人,2022,44(3):267-280.
[21]寇彦芸.救援机器人结构设计优化及其运动学与动力学研究[D].济南:山东大学,2017.
