基于PLC的循迹搬运小车实训装置设计
2024-07-10王超然张禹连方舟
王超然 张禹 连方舟
摘要:随着物流行业的飞速发展,人民生活水平的不断提高,传统的人工搬运方式会浪费大量人力物力。文章基于当前的物流搬运发展现状,采用PLC控制系统,设计了智能化货物搬运小车控制系统,以实现无人工干预的货物搬运,其搬运过程非常省时省力,且具有很高的实际应用价值。文章以S7-1200PLC为控制核心对循迹搬运小车进行控制,通过HMI触摸屏与WINCC进行画面设置,最终实现循迹搬运小车的智能化运行。该系统可以很大程度上减少人力成本,提升物流公司工作效率,为物流行业及社会经济发展起到推动作用。
关键词:物流;PLC控制系统;循迹;智能;搬运小车
中图分类号:TP273 文献标志码:A
0 引言
随着自动化行业的快速发展,智能化运行与PLC控制系统逐渐成为当代工业制造中不可或缺的组成部分。同时,伴随着互联网的高速发展,给人们的生活带来了诸多便捷的同时,网购物品的需求量也在不断加大,从而对企业或仓库中货物的提取、搬运和运输工作提出了更大的挑战[1]。本文基于当前的物流搬运发展现状,拟建立一个省时、省力、低成本的物流搬运实训装置。
现在的物流仓库里,运输大多是在机器分类完成后依靠人工进行搬运,或是用叉车等工具进行搬运,这样不仅浪费了大量的人力资源且耗时较长,容易对物件造成损伤,也易出现错误或没有将物件搬运至指定地点。不仅使得工作效率低下,也容易带来各种损失。为此,笔者查阅相关资料,并深入物流中转站实地调研,提出了设计货物搬运小车实训装置的想法。
1 实训装置总体方案的设计
1.1 总体方案设计
循迹搬运小车控制系统主要由机械手控制系统、自动循迹控制系统、小车的使能控制系统组成。由PLC来调度和控制其他3个控制系统,通过PLC程序的编写,控制与协调各控制系统的工作,保证循迹搬运小车的稳定工作。同时,通过三大控制系统的相互配合,来实现整体的工作目标。
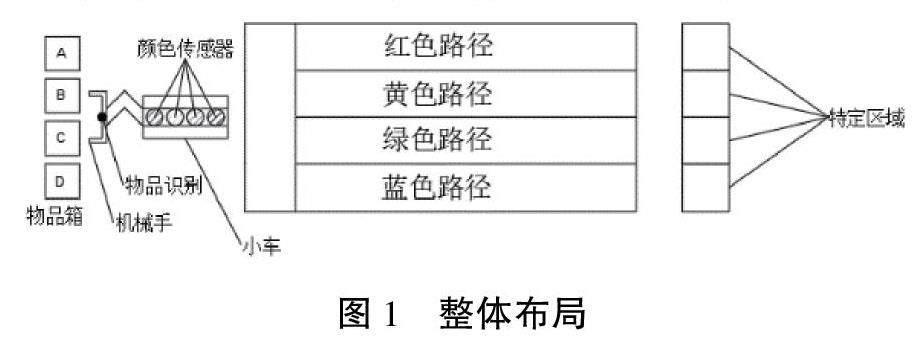
实训装置的整体布局如图1所示,从左到右依次由物品箱、带有机械手与颜色传感器的小车、带有颜色的路线以及最后收件的特定区域组成。
1.2 运动控制
将物品分类装箱后,由小车机械手的物品识别传感器进行扫描,在确定货物发往地之后,机械手开始动作,将物品箱夹起放入车内。小车开始往前行驶,此时小车下方的颜色传感器收到指令,根据道路颜色来寻找正确路线并循迹行驶,直至抵达指定区域,将物品卸下,按照指定路线返回候车区,等待下一条指令。此外,在HMI显示屏上设有紧急制动按钮,发生紧急情况能及时制动。具体流程如图2所示。
2 硬件设计
2.1 PLC及其扩展模块的选型
本文设计采用西门子S7-1200 1215C DC/DC/DC(含有14个数字输入信号和10个数字输出信号)型号的PLC控制设备,不仅能完成模块化和紧凑型设计,还具有可扩展性强、灵活度高等优点。PLC的内部主要组成元件有CPU、扩展接口、输入/输出接口、存储器以及通信接口等,如图3所示。
由于所选PLC控制设备的数字输入与输出信号的数量不足以支持实训装置控制所需,需要扩展设备补足。根据实训装置实际需要的数字输入点与输出点的数量,最终采用型号为SM1221 8DI 24 V DC的扩展设备,如图4所示。
2.2 电机的选型
运料小车由三相异步电机驱动,电机向前旋转,小车往左走;电机反转,则向右走[2]。电机控制回路采用的是时间继电器,可以用时间继电器的延时闭合常开触点来实现电动机从正转运行到反转运行的自动[3]。电机正反转主回路如图5所示。
2.3 I/O分配表
开始PLC程序编写前,需要将输入接口与输出接口一一对应完整。I/O分配要合理、便于布线且简洁,因为I/O接口有限,要在满足功能使用的前提下尽量节约使用,并且要考虑后期功能的扩展和改进,预留一定的I/O接口地址[4]。具体分配情况如表1所示。
在本文的控制系统中,总共有17个输入信号以及9个输出信号。
3 程序设计
编程软件采用博图V15.1。
在设计基于PLC控制系统的自动化控制系统软件时,必须遵循一定的规则。首先,必须最大限度地满足控制设备的控制要求;其次,PLC控制系统的功能必须可靠、安全,这对提高系统的功能起着重要作用;最后,加强健全成本控制,科学提高项目效益。
编程采用的设计语言为图形设计语言中的梯形图(LAD)。梯形图是用于可编程逻辑控制器的主要编程语言,通常使用类似梯形的图形符号来表示控制电路的逻辑关系[5]。梯形图简化了程序设计的过程,使得编程步骤变得简单,便于PLC的开发与维护,且结构清晰,易于理解和审核,便于工程师对PLC控制系统进行调试和维护,被广泛应用于各种工控系统。
控制面板的设计,。可以选择物件的抓取,从而决定小车按照哪种路线运动,如图6所示。
机械手左右移动的控制。选择欲夹取的物件后,机械手能够及时地运动至该物件上方;同时,将物件放置在小车上方后,能够及时地复位,如图7所示。
小车的自动循迹控制。在明确夹取到物件后,小车按照该物件需要去往的库开始循迹并进行运动,如图8所示。
通过梯形图程序的编写,达到了预期的目标,实现了自动循迹搬运的功能。需要修改指令时,可以直接在程序上修改为1或0,能够更好地对仿真软件与运行画面进行控制。
4 画面设计与仿真调试
4.1 仿真软件的选择
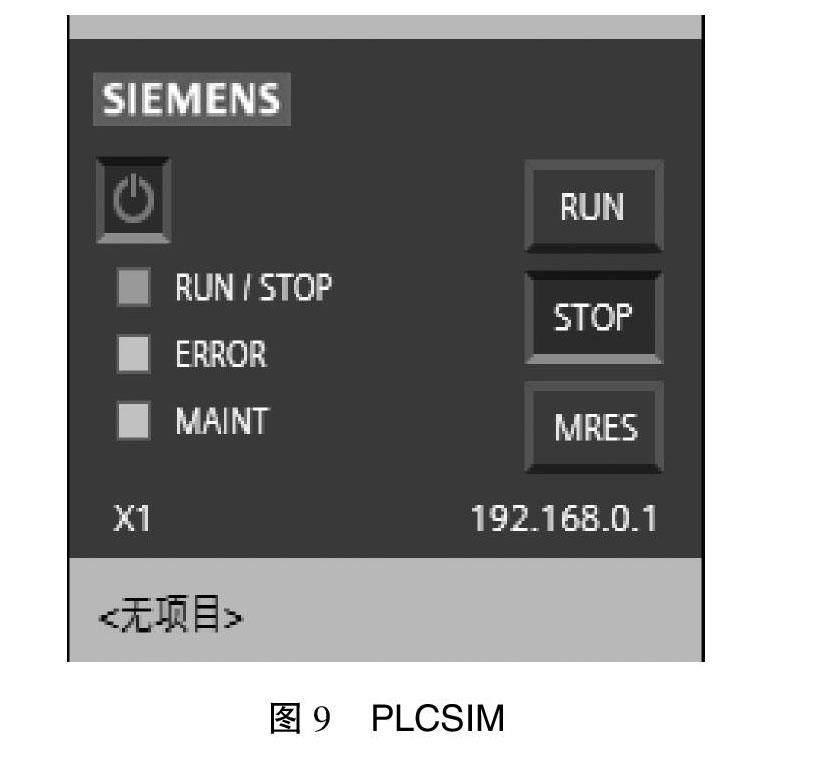
本文采用的是S7-PLCSIM仿真软件。该软件可以在STEP7环境下,对用户编写的程序进行运行和测试,无需连接任何S7系列的PLC,而只需要用到仿真的方式,极大地方便了用户对于程序的修改。S7-PLCSIM为用户提供了一个简单的接口,用户可以通过编程的方式来监控以及修改各种参数,也可以通过使用各种参数和变量表来对这些参数进行监督、监视和修改,如图9所示。
当开始仿真时,PLCSIM为RUN状态,指示灯显示为绿灯;当结束仿真时,PLCSIM为STOP状态,指示灯显示为黄色。
4.2 控制系统仿真画面设计
本文画面的设计采用了西门子公司的WinCC(Windows Control Center)组态系统。WinCC组态软件可为用户提供图形显示、报表统计及归档等功能,广泛应用于工业视觉控制任务[6]。该软件的主要功能包括全局脚本、变量管理、图形编辑器、文本存储、报表编辑器以及交叉索引等,功能灵活方便,用户界面友好,具有很强的实用性。
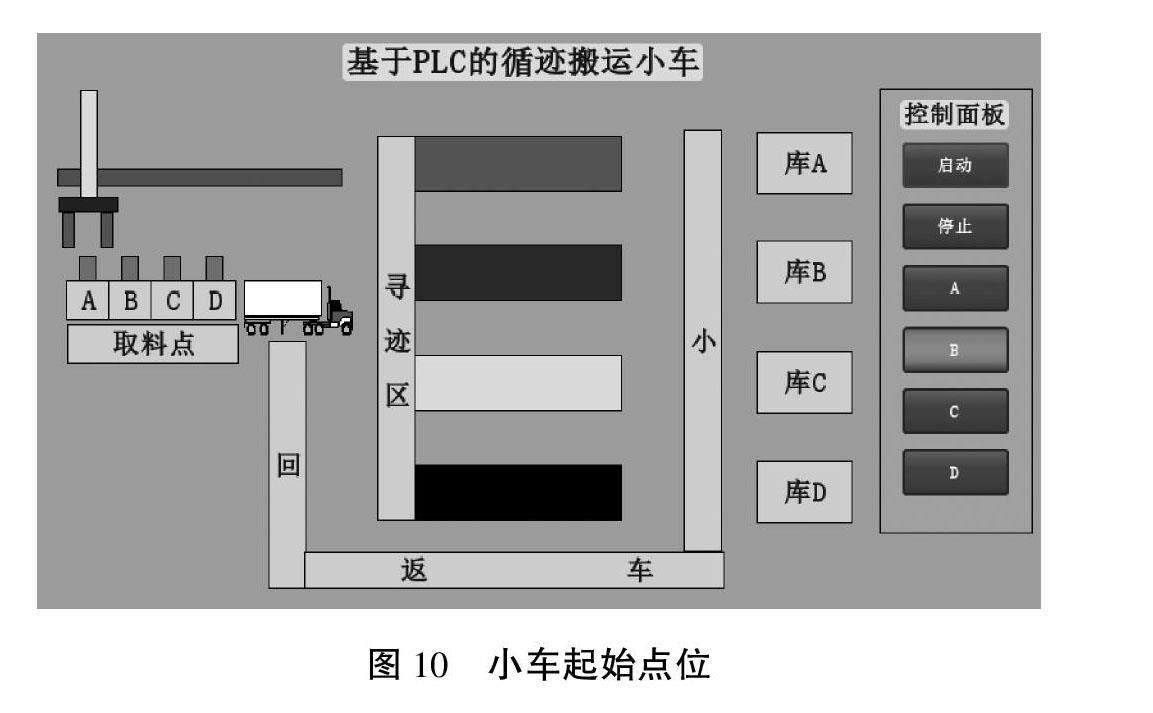
如图10所示,在整个控制画面中,包含机械手、物料点、小车、循迹区、到达地点、返回路线以及控制面板。
在控制面板点击按钮B,机械手动作,夹起物件B并放入车厢。并根据机械手给出的扫描信号,开始运动,抵达循迹区并按照预定路线进行运动,抵达库B,如图11所示,最后沿返回路线返回。
通过画面设计,可以更加直观地看到小车由取料点到库B之间的运行情况,这样更好地展现了仿真所得出的结果,对控制系统的研究设计起到了极大的帮助。
5 结语
经过一系列的仿真与调试,该实训装置能顺利地实现预期的目标。充分发挥了PLC控制系统的维护方便、检测灵活、运行稳定等优势。在提高企业生产效率的同时,也大大地节约了企业的人工成本。同时,该实训装置还能为学校学生实训提供一个教学平台,为学生走入社会工作打下坚实的基础。
参考文献
[1]蔡婷婷,蔡雪.基于PLC的智能物流控制系统模拟设计[J].农业装备技术,2021(6):44-46.
[2]龚书娟,杨世钊.基于PLC的运料小车电气控制设计[J].轻工科技,2019(11):67-68.
[3]贺廉云.基于PLC的运料小车控制系统设计[J].时代农机,2015(7):25-26.
[4]杜伟炯.电气控制与PLC应用技术的分析[J].电子制作,2016(22):5.
[5]刘月波.基于PLC的化工自动化控制系统设计和实现[J].科技资讯,2022(14):70-72.
[6]彭珍瑞.电气控制及PLC应用技术[M].北京:人民邮电出版社,2013.
(编辑 沈 强)
Design of training device for tracking trolley based on PLC
WANG Chaoran, ZHANG Yu, LIAN Fangzhou
(College of Physics and Electronic Engineering, Hanjiang Normal University, Shiyan 442000, China)
Abstract: With the rapid development of the logistics industry and the continuous improvement of peoples living standards, traditional manual handling methods will waste a lot of manpower and material resources. This article is based on the current development status of logistics handling, using a PLC control system to design an intelligent cargo handling car control system, to achieve cargo handling without manual intervention. The process is very time-saving and labor-saving, and has high practical application value. This article uses S7-1200PLC as the control core to control the tracking and handling car. And through the HMI touch screen and WINCC for screen settings, the intelligent operation of the tracking and transportation car is ultimately achieved. This system can greatly reduce labor costs and improve the efficiency of logistics companies, playing a driving role in the logistics industry and socio-economic development.
Key words: logistics; PLC control system; follow the trail; intelligent; moving trolleys
