基于单片机PID 算法的直流电机速度控制方法研究
2024-06-26顾吴华
顾吴华


摘要:文章主要探讨了基于单片机的PID算法在直流电机速度控制中的应用。通过研究PID算法的原理,分析了直流电机速度控制的流程,基于此,文章提出了基于PID算法的直流电机速度控制方法,旨在提高直流电机速度控制的性能,以期为电机控制系统的设计和优化提供理论依据和实践指导。
关键词:单片机PID;直流电机;速度控制
中图分类号:TP273+.4 文献标识码:A
文章编号:1009-3044(2024)14-0107-03 开放科学(资源服务)标识码(OSID) :
0 引言
随着现代工业的发展,直流电机因其良好的控制性能和广泛的应用领域而受到广泛关注[1]。在许多工业中,其对电机速度的精确控制至关重要,因此研究一种有效的直流电机速度控制方法具有重要的实际意义。而PID(比例-积分-微分)控制器作为一种经典的控制策略,已经在许多领域得到广泛应用。该控制器通过调整比例、积分和微分三个参数,可以实现对系统输出的精确控制。单片机作为一种具有低成本、高可靠性、易于编程和扩展性好的微处理器,将PID算法应用于直流电机速度控制具有很大的潜力。故本文旨在研究基于单片机PID算法的直流电机速度控制方法,探讨如何通过调整PID参数来优化控制性能,从而实现对直流电机转速的精确控制。希望通过本文的研究,能为直流电机速度控制提供一种有效的方法,为相关领域的技术发展和应用提供参考。
1 PID 算法原理
PID(比例-积分-微分)控制器是一种反馈回路控制器,主要将比例(P) 、积分(I) 和微分(D) 三种控制作用线性组合,对过程进行控制,以达到减少误差的目的[2]。其中,比例控制是对当前的偏差进行直接响应,将控制对象的偏差(即设定值与实际值之间的差)乘以比例增益(Kp) ,得到一个与偏差成正比的控制信号,迅速减小偏差,但通常会留下一个稳态误差,即偏差不会完全消除。而积分控制的作用是对历史上的偏差累积求和,将偏差信号进行积分,得到一个与偏差历史累积量成正比的控制信号,消除稳态误差,但可能导致系统响应速度变慢,并可能使系统不稳定。微分控制的作用是对偏差的变化率进行控制,对偏差信号进行微分,得到一个与偏差变化率成正比的控制信号,预测偏差的变化趋势,增强系统的稳定性和响应速度,减少超调和振荡。
PID控制器通常有一个调节器,根据上述三种控制作用的效果,调整比例增益(Kp) 、积分时间(Ti) 和微分时间(Td) ,以达到最佳的控制效果。具体PID控制算法表达如式(1) 所示:
式中,u(t) 是控制器输出,e(t) 是控制对象的偏差,Kp、K、i Kd 分别是比例、积分、微分的增益。在实际应用中,PID控制器可以根据不同的控制对象和控制目标,进行参数的调整和优化,以满足控制精度和稳定性需求。PID算法的优势在于其结构简单,易于理解和实施,适用于各种工业和嵌入式系统控制任务。
2 直流电机速度控制流程
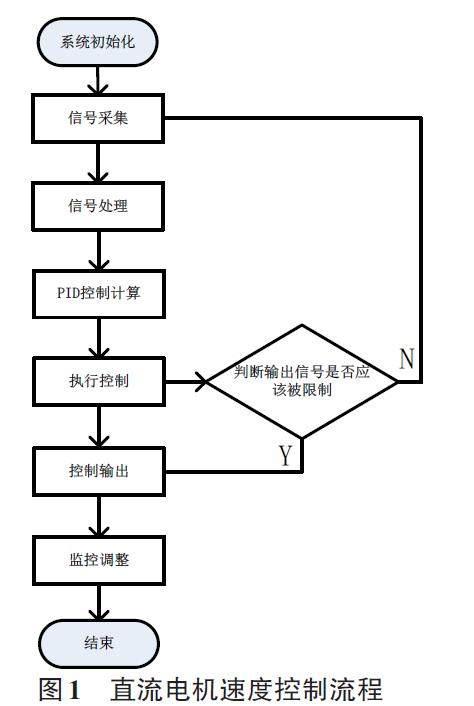
基于单片机PID算法的直流电机速度控制方法研究中[3]。直流电机控制速度的流程如图1所示。
如图1所示,在开始控制直流电机之前,需要对系统进行初始化,将单片机的时钟、中断、IO口、定时器等,以及PID控制器的参数,如比例系数(Kp) 、积分系数(Ki) 、微分系数(Kd) 等配置正确的参数,为后续的控制过程打下坚实的基础。接着在电机上安装传感器,进行信号采集,实时监测电机的运行状态,如转速、位置等信息,这些信息将作为反馈信号供PID控制器使用。紧接着对采集到的信号进行处理,包括滤波、整形等步骤,以确保信号的准确性和稳定性。信号处理的好坏直接影响到PID控制器的输入质量,进而影响到控制效果。PID控制计算是整个控制流程的核心,根据目标速度和实际反馈信号计算出控制输出,在控制过程中,可根据误差信号是否达到预设的阈值,决定是否在PID控制与纯P控制之间进行切换。将信号进行PID计算后,需信号进行控制识别,判断输出信号是否应该被限制,以防止超出驱动器或电机的安全工作范围。接着将输出的信号转换成PWM信号,通过驱动器调节电机的供电电压或电流,实现对电机速度的精确控制。随后,在执行控制阶段,驱动器根据PWM信号调整电机的供电,电机开始运行,而在运行过程中,系统会持续采集反馈信号,实时调整PWM信号,以使电机转速尽可能地接近目标值。在整个控制过程中,系统会实时监控电机的关键运行参数,并据此调整PID控制器的参数,以达到优化控制效果的目的。最后,当电机达到目标速度并稳定运行一段时间后,控制任务被认为是完成的,可以结束控制过程。
在整个流程中,PID控制器参数的设定和调整是关键,合适的参数可以使系统具有更好的动态性能和稳态性能,减少超调和振荡。
3 基于PID 算法控制直流电机速度
3.1 建立电机模型
基于PID算法控制直流电机速度时,建立电机模型旨在确定控制策略和控制器参数的基础。电机模型应该能够准确地描述电机的动态行为,包括电机的电气特性、机械特性和热特性[4]。具体步骤如下。
1) 确定电机类型和参数:在确定电机类型时,需使用直流电源、示波器,以及功率分析仪,对电机关键参数进行测试收集,以此确定电机的物理特性。
2) 建立机电数学模型:在建立模型时,可使用状态空间模型来描述电机动态特性。具体模型结构如图2所示。
如图2所示,建立电机数学模型前,可通过Simu?link建模库选择合适的模型类型,对于直流电机,可选择传递函数模型,调整电机输入和输出之间的比例关系。接着基于电机的工作原理利用电机动力学方程进行理论推导,首先利用转矩方程分析电机在不同负载下的性能[5]。具体计算如式(2) 所示:
t = KT × I (2)
式中,KT 是一个常数,代表了电机的转矩常数。t 是电磁转矩。I 是电枢绕组中的电流。接着用电流方程来分析电机的启动和运行过程中的电流变化,以及响应外部扰动时的动态行为。具体计算如式(3) 所示:
式中,I机是电枢电流。U机是电机电压。R机是电枢电阻。此外,还需分析电机端电压与电动势及负载电流之间的关系,以此确定电机的电压稳定性以及在不同工作点下的电压表现。具体计算如式(4) 所示:
U = E + I × R (4)
式中,U 是电机的电压。E 是电枢绕组的电动势。R 是电枢电阻。其中,电动势E 是由反电动势产生的,反电动势的大小与电机的转速ω 和电枢绕组的匝数N成正比,计算如式(5) 所示:
E = KE × w × N (5)
式中,KE 是一个常数。最后,通过计算电机的转速,分析模型在不同控制策略下的转速响应。具体计算如式(6) 所示:
W = W0 + α × t (6)
式中,W 是电机的转速。t 是电机转速产生的时间常数。α 是电机的角加速度。W0 是电机初始转速。利用上述方程和参数,通过理论推导和实验数据校准,能够建立一个能准确描述电机动态行为的数学模型。
最后,进行模型验证,将模型的输入与实际电机的输出进行比较,以检查模型是否能够准确地预测电机的动态行为。在实际应用中,控制器会根据这个模型来设计电机的响应,确保电机能够稳定运行并满足性能要求。
3.2 设定控制目标
基于PID算法控制直流电机速度时,设定控制目标是为了明确模型应该达到的性能指标[5]。为实现这些性能指标,需设计一个有效的PID控制器,能够根据电机的实际速度与期望速度之间的差异来调整电机的驱动信号。具体PID控制环路原理如图3所示。
如图3所示,在PID控制环路原理图中,比例(P) 、积分(I) 、微分(D) 是三个基本的控制动作,其共同构成了PID控制器,用于调节被控对象的行为,以便让被控对象的输出y(t) 跟踪或接近期望的设定值r(t)。
为确保直流电机速度控制系统的稳定性和准确性,需要设定一系列的性能指标作为控制目标,并在此基础上优化PID参数,通过对PID参数的优化,使系统在这些性能指标上达到最佳的表现。具体性能指标参数的详细变化见表1所示。
由表1可知,随着Kp、Ki和Kd取值的增加,模型的稳态误差逐渐减小,响应时间、过冲量、超调量、上升时间和调整时间也逐渐减少。当Kp、Ki和Kd取值在0.3-1.0的范围内时,稳态误差从0.5降低到0.2,响应时间从1.5s减少到1.0s,过冲量从10% 降低到3%,超调量从15% 降低到5%,上升时间从2.0s 减少到1.2s,调整时间从5.0s减少到2.0s。这表明,适当增加Kp、Ki和Kd的值可以提高模型的稳态性能,减少响应时间、过冲量和超调量,并加快电机上升速度和调整过程。因此,通过分析这些数据,表明PID参数的优化对于改善直流电机速度控制系统的性能至关重要[6]。通过细致的实验和分析,可以确定最优的PID 参数组合,从而实现对直流电机速度的精确控制。
4 结束语
综上所述,文章针对基于单片机PID算法的直流电机速度控制方法进行了深入的研究与探讨。分析了直流电机速度控制的流程,提出了基于PID算法的直流电机速度控制方法,并通过建立电机模型和设定控制目标,探讨了如何通过调整PID参数来优化控制性能。研究结果表明,通过优化PID参数,可以提高模型的稳态性能,加快电机的上升速度和调整过程。最后,希望本文的研究成果能为直流电机速度控制领域的发展起到一定的推动作用。
参考文献:
[1] 徐涛,刘新宇,王学鹏.基于改进PID的供暖阀门直流电机控制系统设计[J].电机与控制应用,2022,49(12):28-33.
[2] 纪承乾.基于EMA的自适应PID算法研究[J].电子乐园,2023(2):103-108.
[3] 束红林.基于单片机PID算法的直流电机速度控制方法[J].电气传动自动化,2023,45(3):5-7,20.
[4] 佟文明,王萍,吴胜男,等.基于三维等效磁网络模型的混合励磁同步电机电磁特性分析[J].电工技术学报,2023,38(3):692-702.
[5] 严彦,魏凌霄,李鹏飞,等.气压弹射系统用微型压缩机动态转矩特性[J].流体机械,2023,51(2):41-47,55.
[6] 卢宁,宋鹏程.基于机电联合仿真的塔式起重机变幅定位与防摆控制研究[J].制造业自动化,2023,45(12):158-162.
【通联编辑:光文玲】
