基于多目标优化的过饱和交叉口信号模糊控制
2024-06-21时柏营杨宇雷程远崔博伟丁东玥
时柏营 杨宇雷 程远 崔博伟 丁东玥
摘 要:文章针对当前交叉口控制策略存在的时效性差等问题,提出了一种基于模糊控制的过饱和交叉口信号配时优化策略。通过对拥堵交叉口的调查,结合模糊控制理论,设计了一种缓解拥堵的策略,主要通过增加绿灯延长时间来优化信号配时。为验证该方案的可行性,利用仿真软件对拥堵交叉口信号配时方案进行了仿真模拟,并考虑将一条直行车道变为可变车道的情况。同时,利用Matlab对运用了模糊控制的交叉口信号方案进行了模拟,并进行了两者的对比分析。通过仿真模拟,验证了所提出的缓解拥堵策略在减缓交通拥堵方面的有效性。
关键词:交叉口控制;模糊控制;绿灯延长时间;Matlab;仿真模拟
中图分类号:F253;U121文献标志码:ADOI:10.13714/j.cnki.1002-3100.2024.10.009
Abstract: This article proposes a signal timing optimization strategy for oversaturated intersections based on fuzzy control to address the issues of poor timeliness in current intersection control strategies. By investigating congested intersections and combining fuzzy control theory, a congestion alleviation strategy was designed, mainly by increasing the green light extension time to optimize signal timing. To verify the feasibility of this scheme, simulation software was used to simulate the signal timing scheme at congested intersections, and the situation of changing a straight lane into a variable lane was considered. At the same time, Matlab was used to simulate the intersection signal scheme using fuzzy control, and a comparative analysis was conducted between the two. Through simulation, the effectiveness of the proposed congestion alleviation strategy in alleviating traffic congestion was verified.
Key words: intersection control; fuzzy control; green light extension time; Matlab; simulation
0 引 言
在城市化进程不断加速的今天,交通拥堵、交通事故和车辆排放已经成为城市面临的严重挑战之一。而制定有效的信号灯控制策略,具有显著改进交通安全和通行效率的潜力。指定有效的控制策略有望有效减少道路交叉口内车辆、行人和非机动车之间的冲突,可以降低潜在的交通事故风险,并提高交叉口的通行效率[1]。在应对复杂的道路网络时,加上交叉口车辆具有到达的随机性等特点,传统信号控制方式表现出不适应性的缺点,因此已经无法满足现在的交通需求。然而,当前的研究多是以实时监控为基础,缺少对历史数据的有效利用,从而也在某种程度上造成了自适应信号控制的滞后[2]。
然而,随着技术的不断进步,传统交通管理正逐渐向着智能交通的方向演进。现在,我们可以借助道路上的智能检测机器获得更为精确的车辆信息,例如车辆通过交叉口的到达率和离开交叉口的行驶方向等[3-4]。而传统信号控制方法,主要依赖于人工计数或线圈检测以获取车辆速度、流量等交通参数[5],难以对不同交通参与者进行细致的区分。
由于模糊控制理论无需借助现有的量化模型,就能脱离精确的数学模型从而对模型中的研究对象进行控制,因此非常适用于城市交通信号的控制[6]。而模糊控制因为依赖于专家经验,在处理复杂的非线性控制对象方面具有优势。所以,国内的许多学者也开始采用模糊控制方法对交通信号控制系统进行优化,来提升交通系统的通行效率[7]。李鑫瑞针对有主次干道之分的干线多个连续交叉口,通过模糊控制理论协调各路口信号周期、绿信比和相位差三个控制参数完成对干线交叉口信号的配时优化。该实例仿真表明在李鑫瑞设计的组合协调模糊控制方法下的车辆平均延误较低于干线普通模糊控制方式,控制效果有所提高[8]。王敏[9]对城市主干道过饱和的交叉口提出一种基于模糊控制的交叉口交通信号控制方法,来缓解交通过饱和状况。王敏设计了绿灯需求度模糊控制器,来动态地控制交叉口信号相位的相序;在此基础上,考虑将下一次相位的需求度作为输入,设计了绿灯延时模糊控制器,用于确定当前相位绿灯的延长时间。曹洁等[10]将神经网络与模糊控制进行结合。利用神经网络具有自学习的能力,通过训练来学习给定的经验,并生成模糊控制规则,而模糊控制则用来生成信号配时的时间。
1 交叉口现状
本文以济南市历城区世纪大道与龙凤山路交叉口作为研究对象,来探讨交叉口信号灯运用模糊控制的结果。
1.1 交叉口车道布置及其相位
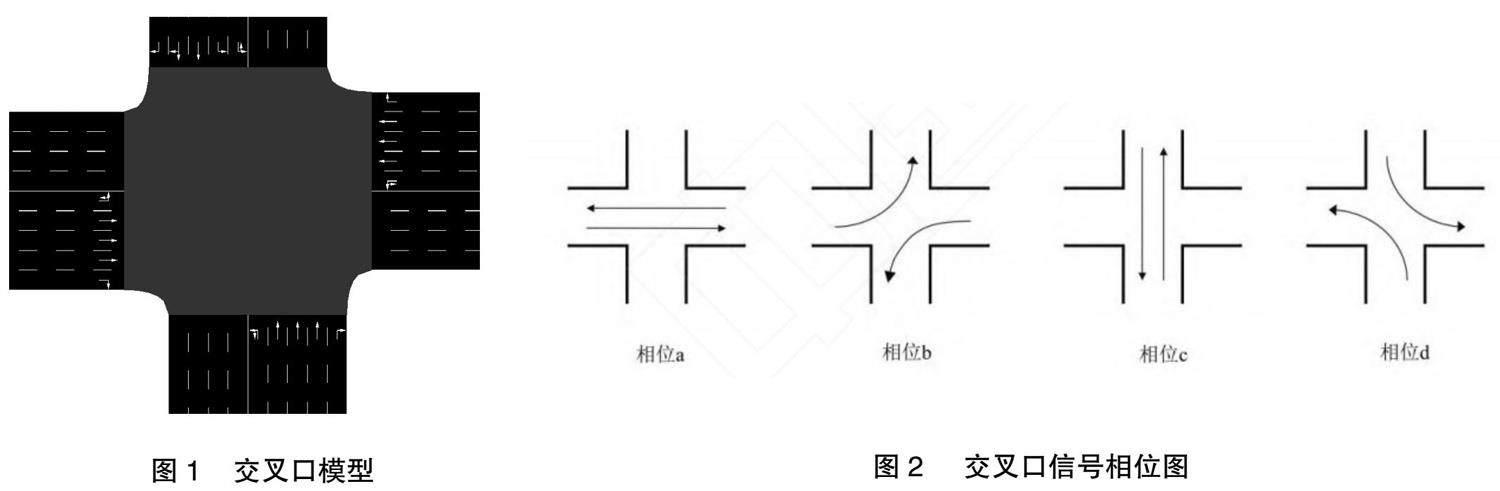
图1为该交叉口的交通流向图。本文研究的单交叉路口采用典型的四相位控制,每个进口道均有左转、直行和右转车道并且人行道和右转车道之间有绿化带进行分隔。在实际交通中一般右行车辆只与过马路行人发生冲突而不与其他方向的车流冲突。
为了确保交叉路口的机动车交通顺畅,本文所研究的交叉口采用了一种四相位控制方案,如图2所示。这四个相位分别代表道路上正在通行的车辆,而交通信号灯也按照这四个相位的顺序进行切换。在不同相位的信号灯进行切换时,黄灯会闪烁以提醒驾驶员进行红绿灯的相位切换。在这个信号灯组中,右行车道的控制暂时不予考虑。
1.2 交叉口存在的问题
交叉口西进口左转车辆较多,在高峰期间会造成较长的车辆排队现象,同时东西进口方向直行车辆较少。在高峰期间,会造成交叉口东西方向直行时间的浪费。
应用智能控制算法来管理单交叉口信号灯配时和相位顺序,实际上是为了确定最佳的信号灯配时周期,以最小化整个路口的通行延误时间,优化交通流的控制,以提高道路通行效率,减少交通拥堵,以及提升通行者的出行体验。在本文中,我们将研究和分析智能控制算法如何用于优化单交叉口的信号灯控制,以实现上述目标。
2 模糊控制系统的设计
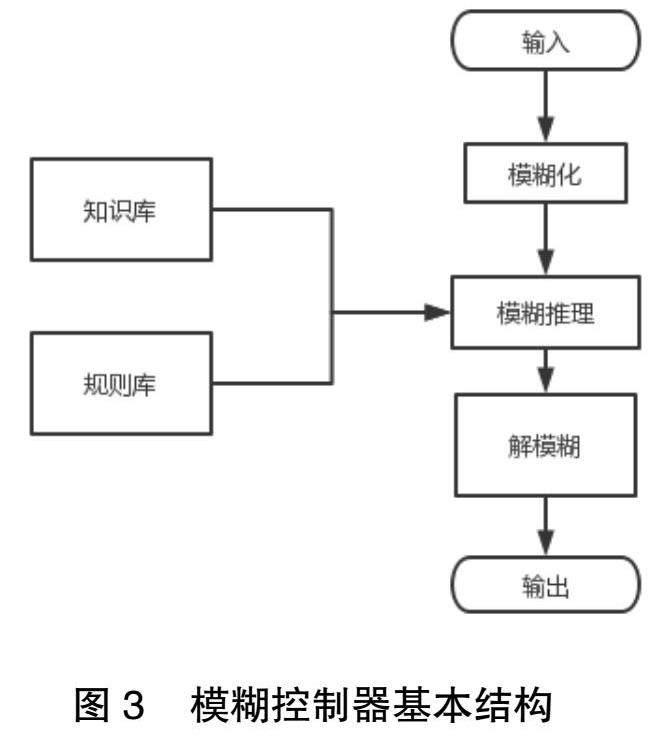
模糊控制的本质是对人进行决策的一种模拟,它把人的思维与决策过程和模糊推理相结合,把人类的体验作为一个知识库,并把这种体验通过数字形式传送到电脑中,从而实现计算机程序代替人类的思维进行模拟运算。在此模拟基础上,有人提出了一种新的控制方法,并在此基础上实现了对控制量的准确计算[2]。这种控制方法的目的就是让计算机在不确定的情况下,对其进行智能化的判断与控制,这与人基于经验或模糊信息进行判断的过程十分相似。模糊控制器的基本结构如图3所示。
2.1 模糊控制相位选择规则
如图2所示,本文研究的交叉口共有四个相位,在进行模糊控制时,相位选择方案[6]如下。
a.将四个相位分别命名为qa,qb,qc,qd。
b.如果当前相位状态为qa,则对比剩余三个相位状态,如果qb为VB的状态,那么将相位由qa变为qb。
c.如果qb不是VB状态,跳过qb再选择qc,qd中的一个变为VB状态,并且作为下一个选择相位。
d.如果剩余三个相位都不是VB状态,那么选取车流量作为决定因素,车流量最大的相位下,将该相位作为下一相位。
e.如果剩余三个相位中,有两个车流量大的相位并且状态一样,那么根据之前的命名方式,由qb>qc>qd的关系来决定。
f.当qa后的相位选择好之后,再对剩余的两个相位进行对比。规则如之前所示。
g.当第三个相位选择好之后,这一轮相位选择决定了这一轮相位顺序,为一个循环。通行完这一循环的最后一个相位,进入新一轮的相位选择循环中。
2.2 模糊控制下的交通信号时间控制算法
本文运用模糊控制研究的交叉口相位绿灯延长时间的具体步骤如下[7]。
基本参数:gmin表示该相位原本绿灯时间;gmax表示该相位允许的最长绿灯时间;gd表示当前相位已延续绿灯时间;gy表示黄灯时间。
a.先不对交叉口信号时长进行任何改变,该相位按照原本的绿灯时间gmin进行通行。
b.在当前相位的绿灯时间结束前,通过路段上设置的检测器将当前相位剩余绿灯时间和当前相位中的车辆排队信息、到达率等输入到模糊控制中的观测模块。
c.将b.道路观测器中观测到的剩余绿灯时间和排队信息输入到Matlab中的模糊控制决策模块,并经过相关推理得到当前相位的交通强度,并根据所得到的交通强度进一步推理出绿灯延长时间。推理后有:如果延长时间大于等于10s,并且延长时间加上gd小于gmax,则给当前相位以之前决策模块推理出的延长时间,并且回到b.;如果延长时间大于等于10s,并且延长时间加上gd大于等于gmax,则到d.;如果延长时间小于10s,则到e.。
d.得到绿灯延长时间后,进入到下一相位,进行e.。
e.经过gy后,进入到下一绿灯相位,回到a.。(将绿灯延长时间的阈值设为10s的原因是:实验中发现短于10s的绿灯延长会造成车辆无法及时通过交叉口进而对交叉口下一相位的车辆造成影响)
2.3 输入、输出模块
输入模块是输入当前交叉口所观测到的交通量e1,和根据观测到的交通量计算当前相位剩余的绿灯时间e2和预测下一绿灯相位的交通流强度。
输出模块是输出绿灯延长时间et。
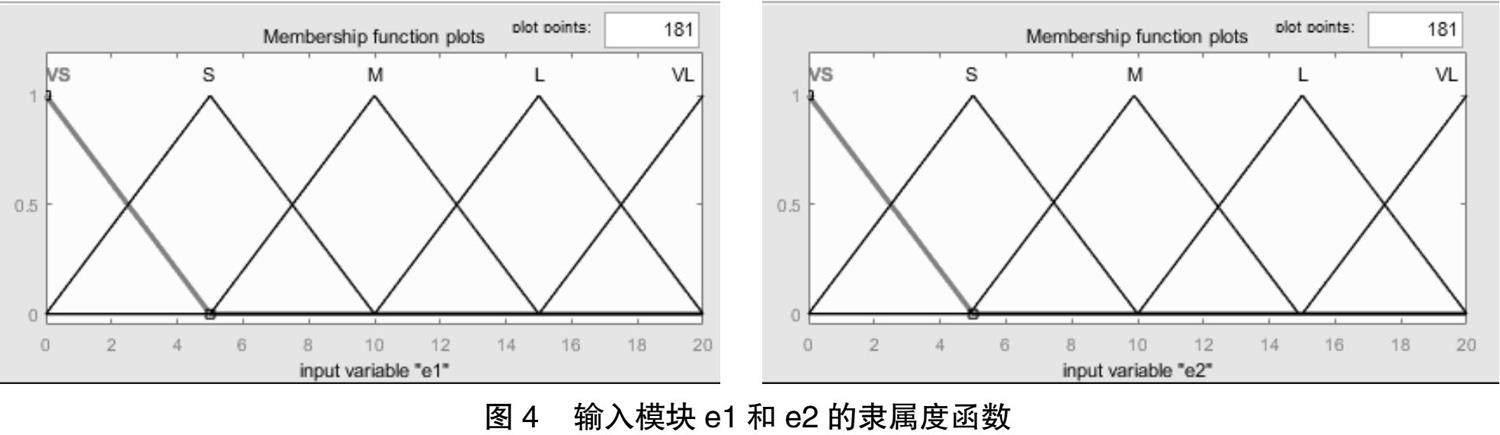
输入模块交通量e1的论域设置为[0,20],将输入e1论域划分为五个模糊子集,用文字表述为[很少,少,中等,多,非常多],用字母简单的表述为[VS,S,M,L,VL];当前相位绿灯剩余时间e2的论域设置为[0,20],将输入e2论域划分为五个模糊子集,用文字表述为[很短,短,中等,长,非常长],用字母简单的表述为[VS,S,M,L,VL]。详见图4。
输出模块绿灯延长时间et的论域设置为[0,20],将输出et论域划分为五个模糊子集,用文字表述为[很短,短,中等,长,非常长],用字母简单的表述为[VS,S,M,L,VL]。详见图5。
隶属度函数选取三角形的原因是:三角形的隶属度函数具有计算复杂度低,参数灵活易于调整等优点。
2.4 决策模块模糊规则的设置
按照经验总结出来的输入输出变量的模糊子集一对一划分,共有25条对应规则,如表1所示,绿灯延时补偿用字母简单表述为[VS,S,M,L,VL],用文字表述为[很短,短,中等,长,很长]。
2.5 模糊推理及解模糊
模糊推理是基于输入模型中的模糊量e1,e2,并且通过表1中规定的模糊规则进行控制,以解决模糊关系方程的问题。在本文所设计的模糊控制系统中,在进行解模糊的过程中本文采用的方法是乘积推理法和重心法。
乘积推理法是指基于输入模糊量e1,e2的模糊规则进行推理,使用模糊集合之间的乘积运算来获得推理结果。而重心法则用于解模糊化,通过计算模糊集合的重心或平均值,将模糊输出转换为精确的控制量。重心法是首先求解模糊集合隶属度函数曲线与横坐标轴所围成的面积,然后算出面积的中心,详见图6。选这个中心对应的横坐标值作为集合的代表值的方法。在本文中,我们的模糊控制系统采用了这些方法来实现模糊推理和解模糊化的过程。
具体计算方法[7]如下所示。
公式中:u*为决策结果的精确输出量;ui为所触发的第i条模糊规则的后件隶属度函数的中心值;μi为被触发的第i条规则的所有输入变量的隶属度的乘积;I为所触发的模糊规则数。
3 仿真运行及结果研究
3.1 仿真软件
Sumo是一款自由开源的微观多模式交通仿真软件包,为交通领域的研究和开发提供了关键工具。该软件允许用户通过其官方提供的Python接口进行二次开发,以满足特定需求。在此本文建立了潮汐车道,只在高峰时段为了缓解交通拥堵而设立的一条左转可变车道。将原交叉口的西进口直行车道中的一个换成了左转的潮汐车道以应对左转拥堵的情况。得到只运用潮汐车道的仿真结果,并进行仿真结果的对比。
Sumo软件的功能涵盖了多个仿真应用领域。然而,在其目前的版本中,Sumo软件在进行交通路网仿真时,交通信号灯的配时仍然采用了静态的时间表控制方式,包括固定程序定时控制和多时段控制,这限制了其实现动态的交叉口信号灯配时策略的能力。
3.2 建立模糊控制仿真交叉口模型
为了验证模糊控制的交通信号配时方案的有效性,笔者选择了济南市道路在交通高峰时段的数据作为研究对象。在相同的道路条件下,笔者进行了一周的连续观察,获得了高峰时段的平均车辆数量。随后,笔者运用Matlab-Simulink进行了模型建立和仿真,模拟了上述的模糊控制配时方案。在仿真中,笔者对比了使用模糊控制配时方案和目前交叉口采用的固定定时信号控制方案的仿真结果。笔者以平均车辆延误、排队长度以及停车次数等指标作为评价标准,比较了这两种不同配时方案的仿真结果,以评估它们在信号配时控制方面的效果。这一研究方法的目的是通过仿真和数据对比,来确定模糊控制信号配时方案是否能够在济南市的交通高峰时段内取得更好的交通流控制效果。
3.3 仿真参数
仿真中车辆交叉口设置为从东、西、南、北4个进口道进入路网,并且右转车流与人行道之间有绿化带进行分割,4个进口道都设有左转、直行、右转车道。本文研究的交叉口原有的定时控制方案为四相位,高峰时段的定时控制方案周期时长为198s,其中东西方向基础相位绿灯时间为81s,35s;南北方向基础相位绿灯时间为35s,33s,黄灯时间均为3s。设置仿真时长为2 400s。
3.4 性能评价指标
用于评价控制器性能的指标来自仿真软件中的输出文件。该输出文件记录了仿真过程中车辆、红绿灯以及所有实验中涉及到的需求元素的状态信息。在这些信息中,本文选取了平均延误时间、平均停车次数、平均排队长度作为控制性能评价指标。
3.5 仿真结果及分析
由图7可以看出在该交叉口应用了模糊控制方案后,可以有效减小上述评价指标的值,并且对交叉口的优化效果比运用可变车道的效果要明显。在运用了模糊控制之后可以有效地降低车辆的停车次数,这表明可以有效减少车辆的二次停车情况。这是通过预测车辆到达交叉口的时间,并相应地调整绿灯延长时间来实现的。
根据预测结果,可以合理地安排绿灯延长时间,使本次信号循环中的等待车辆可以不用等到下一循环通过,从而减少了车辆通过该交叉口的延误时间和排队长度。这种策略能够有效提高交通流畅性,降低车辆的延误,并对交通拥堵问题做出积极的贡献。
4 结 论
本研究的结果表明,采用本文提出的方法可以有效地减少车辆通过交叉口的延误时间,并减少车辆的二次停车情况。这是通过预测车辆到达交叉口的时间,并相应地调整绿灯延长时间来实现的。并且根据预测结果,可以合理地安排绿灯延长时间,使本应等待下一周期通行的车辆得以在当前周期通过,从而缩短车辆的排队长度。这种策略能够有效提高交通流畅性,降低车辆的延误,并对交通拥堵问题做出积极的贡献。
然而,由于研究对象的复杂性,仍然存在一些限制和问题需要解决。首先,在本研究中未设计车辆信息采集系统,这导致模拟车辆数据与实际道路上的车辆状态存在一定差异。为了更准确地反映实际交通状况,未来的研究可以考虑引入先进的车辆信息采集技术。另外,本文主要侧重于城市道路信号交叉口的单点控制问题。为了更全面地缓解城市交通拥堵,进一步的研究可以将本文所提出的控制方法推广到干线和区域的交通控制。这将为实现更大范围的交通流优化提供有益的参考和指导。本研究的方法在缓解交通拥堵方面取得了显著效果,但仍然存在改进的空间和可以拓展的研究方向。通过进一步改进车辆信息采集系统并扩大研究范围,我们可以进一步提高交通系统的效率和可持续性。
参考文献:
[1] LEITNER D,MELEBY P,MIAO Lei.Recent advances in traffic signal performance evaluation[J].Journal of Traffic and
Transportation Engineering (English Edition),2022,9(4):507-531.
[2] 郭宇婷,田宗忠,蔡宏洲.复杂交通流条件下自适应信号控制系统协调优化方法的研究[J].公路,2020,65(8):255-263.
[3] CHEN Qi,WANG Wei,WU Fangyu,et al.A survey on an emerging area: Deep learning for smart city data[J]. IEEE Transactions on Emerging Topics in Computational Intelligence,2019,3(5):392-410.
[4] XING Jiping,WU Wei,CHENG Qixiu,et al.Traffic state estimation of urban road networks by multi-source data fusion: Review and new insights[J/OL].Physica A: Statistical Mechanics and its Applications,2022:127079.[2023-10-02].https://api.semanticscholar.org/CorpusID:247123472.
[5] 雒冰.单点信号交叉口智能控制的优化模型和方法研究[D].北京:北京交通大学,2018.
[6] 邓丽云,贺为婷.单交叉口交通信号灯的模糊控制方法研究[J].国外电子测量技术,2018,37(4):83-86.
[7] 刘佳佳.基于模糊逻辑和强化学习的交通信号优化方法设计与实现[D].北京:北京邮电大学,2022.
[8] 李鑫瑞.基于模糊控制的交通信号配时优化[D].西安:西安科技大学,2017.
[9] 王敏.城市主干道过饱和交叉口交通信号控制方法研究[D].西安:长安大学,2016.
[10] 曹洁,李振宸,任冰.基于神经网络模糊控制的单交叉口信号控制[J].兰州理工大学学报,2010,36(1):86-90.
[11] 黄文杰.单个交叉口信号配时的模糊控制[J].交通科技,2009(S1):89-91.