机动飞行下磁流变阻尼器-转子系统动力学特性
2024-06-15王俊刘云飞秦朝烨马梁洪芳芳褚福磊
王俊 刘云飞 秦朝烨 马梁 洪芳芳 褚福磊


摘要: 航空发动机在机动飞行过程中,工作条件非常恶劣,飞行过程会产生不规则的瞬态振动,易引发故障。采用有限元法建立机动飞行下基于双线性本构方程的磁流变阻尼器?转子系统有限元模型,并利用Newmark?β数值方法进行求解,研究转子系统在机动飞行过程中的动态特性。在此基础上,考虑磁流变阻尼器作用,研究其对冲击载荷下转子系统瞬态及稳态响应的影响。结果表明,机动飞行开始和结束瞬间会产生瞬态冲击,激发转子系统一阶模态响应。在合适的电流作用下,变阻尼器可以有效抑制机动飞行过程中转子系统瞬态及稳态响应。此外,在机动飞行下,由于轴颈离心率较大,易导致磁流变阻尼器产生非线性行为。
关键词: 航空发动机; 机动飞行; 磁流变阻尼器; 转子系统; 瞬态冲击
中图分类号: V231.96 文献标志码: A 文章编号: 1004-4523(2024)05-0747-09
DOI:10.16385/j.cnki.issn.1004-4523.2024.05.003
引 言
机动飞行包括瞬时转弯、爬坡?下降、加速、持续转弯和翻滚等,是飞机特技飞行和空战中的常见动作,对航空发动机转子系统的动力学特性有着重要影响[1?2]。
近年来,国内外学者对机动飞行环境下转子系统的动力学特性进行了大量的研究。El?Saeidy等[3]考虑基础激励和不平衡质量,建立了刚性转子系统的动力学方程,利用解析方法得到了系统的时域分析结果。祝长生等[4]利用Lagrange方程建立了飞机在任意机动飞行条件下的转子系统动力学统一模型,讨论了飞机的典型机动飞行动作对转子系统动力学特性的影响。Andrés等[5]实验研究了机动载荷下气体轴承?转子系统动力学响应。Yu等[6]研究了不同机动载荷对转子?联轴器系统的动力学特性的影响,发现增大机动速度会增强联轴器的非线性行为,使转子系统的振动由单周期运动转变为多周期、分岔或混沌运动。Gao等[7?9]对机动飞行下转子系统动力学特性进行了较为详细的研究,通过理论及实验分析了机动载荷对轴承、挤压油膜阻尼器支承下正常及故障转子系统非线性行为的影响。Chen等[10]研究了挤压油膜阻尼器?转子系统动力学特性,结果表明对于较大的机动飞行动作,需要增加油膜的间隙,以降低油膜的非线性水平。
机动飞行时,发动机转子系统将承受很大的附加离心力和陀螺力矩,并且这些载荷随飞行状态和时间发生变化,导致系统运行不稳定。特别在机动载荷作用下,发动机转子发生较大的挠曲变形,挤压油膜阻尼器(Squeeze Film Damper, SFD)会因为油膜过度被挤压而非线性显著增强,产生双稳态跳跃、锁死和非协调进动等严重的有害现象,进而恶化转子系统的振动状态,甚至可能造成转子失稳。且SFD作为被动式支承结构无法根据实际工况做出反馈调节,改善转子系统的振动特性。
本文以机动飞行下的转子系统为研究对象,考虑具有变刚度和变阻尼特性的磁流变阻尼器,基于有限元方法建立机动飞行下磁流变阻尼器?转子耦合系统动力学模型,采用Newmark?β数值方法对动力学方程进行求解,研究磁流变阻尼器对冲击载荷下转子系统瞬态及稳态动力学特性的影响。
1 机动飞行下磁流变阻尼器?转子系统有限元模型
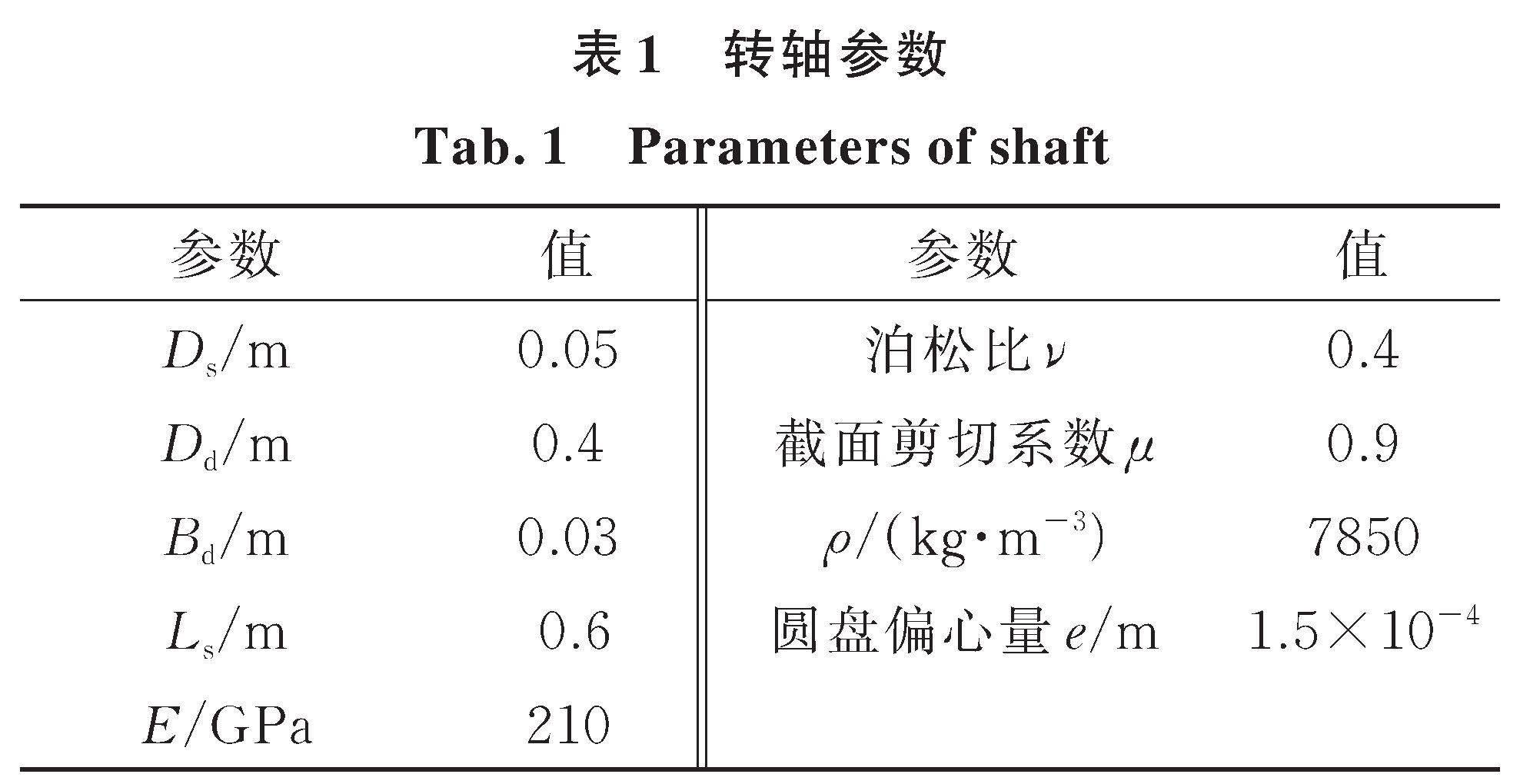
如图1所示为磁流变阻尼器支承下转子系统的有限元模型。转轴考虑为Timoshenko梁,并被划分为10个梁单元和11个节点,每个节点具有四个自由度,即xoy平面内的平动和绕x轴、y轴的转动。刚性圆盘作为一个集中质量单元叠加在相应节点上。Dd表示圆盘直径,Bd表示圆盘厚度,Ds表示转轴直径,Ls表示转轴长度。
基于Lagrange方程,转子系统动力学方程可表示为[11]:
式中 ,,其中,x和y分别表示单元节点在x和y方向的位移,和分别表示单元节点绕x轴和y轴转动的角度;ω为转轴角速度;M,J和K分别为系统质量矩阵、陀螺矩阵和刚度矩阵;Q1和Q2为一般外力。
1.1 磁流变阻尼器动力学模型
坐标系XYZ(如图2所示)用于定义流体流动的位置和速度分量。eB为内环偏心量,θ为相对于最小油膜位置处的油膜方位角,h为相应方位角下油膜的厚度,其可被近似表达为:
(2)
式中 c为初始径向油膜间隙。
基于双线性本构方程,磁流变阻尼器油膜压力可表示为[12?13]:
当0≤Z≤Zc时:
当Zc≤Z≤L时:
式中 定义αη=ηc/η为黏度比,η表示未施加电流作用时的磁流变液黏度,ηc表示硬核处磁流变液黏度;为油膜厚度对时间t的一阶导数;Zc为硬核在Y方向上充满整个油膜间隙的起始点轴向坐标位置(如图3所示);为油膜压力对变量Z的一阶偏导;pc为油膜压力在轴向Zc位置处的压力值;C1和C2为积分常数;τc表示硬核边界处磁流变液剪切应力;τy为磁流变液屈服应力,其与磁场强度之间的关系表达式为[14]:
式中 H=IN/(2h)为磁场强度,I为电流强度,N为线圈匝数;a1=0.0297;a2=19.75;a3=1.102×104;a4=-2.482×104;c1=-22.29;c2=2.601×104为常系数。
通过求解式(4)可获得油膜沿轴向的压力梯度,对沿轴向进行积分可获得油膜压力分布:
式中 pA为大气压。
则磁流变阻尼器的径向油膜力和切向油膜力可表示为:
式中 R为磁流变阻尼器半径;L为阻尼器轴向长度。
磁流变阻尼器油膜力在x和y方向上的分力可表示为:
式中 xe和ye分别为磁流变阻尼器内环中心在x和y方向上的位移。
1.2 转子支承系统动力学模型
滚动轴承示意图如图4所示。轴承外圈与鼠笼弹性支承相连,内圈与转轴相连,并随转轴旋转。假设滚珠在轴承保持架上等间距排列,并做纯滚动。
在图4中,Ri为内滚道半径,Ro为外滚道半径,φi为第i个滚珠在t时刻的角位置,即:
式中 ωo为滚珠中心角速度;Nb为滚珠数量。
第i个滚珠与滚道的法向接触变形δi可表示为:
(13)
式中 xb和yb分别为轴承内圈中心在x和y方向上的位移;r0为轴承游隙。
基于非线性Hertz接触理论,轴承力模型可表示为[15]:
式中 Cb为Hertz接触刚度;H(·)为Heaviside函数。
转子系统支承结构如图5所示。根据牛顿第二定律,磁流变阻尼器支承系统动力学方程可表示为[14]:
式中 mb为轴颈质量;mm为轴承外圈质量;ce为轴承处阻尼系数;ka为鼠笼刚度。
1.3 机动飞行动力学模型
如图6所示为描述机动飞行的模型和坐标系。基于拉格朗日方程,祝长生等[4]提出了一种在任意机动飞行条件下,带有不平衡的多刚性盘、多集总质量和多轴承的线性和非线性转子系统一般动力学模型。参照[4]的方法,机动飞行下转子?轴承系统的动力学方程可以表示为:
式中 为转轴单元节点的位移向量;,,,分别为转轴单元的质量矩阵、刚度矩阵、阻尼矩阵和陀螺矩阵;为施加在单元节点上的一般外力。CB,i,KB,i和FB,i分别表示机动飞行引起的等效附加阻尼矩阵、刚度矩阵和附加力向量:
式中 和分别为机动飞行所施加单元节点的直径转动质量和极转动惯量;mi为机动飞行所施加单元节点的质量;X,Y以及Z分别表示机动飞行水平、垂直和移动方向;θX,θY和θZ分别表示绕X,Y和Z方向的旋转角度;vX和aX分别为X方向上的速度和加速度;vθX和aθX分别为绕X轴旋转的角速度和角加速度,它们在Y和Z轴上具有相似的表达方式。
2 结果与讨论
为了研究磁流变阻尼器对机动飞行下转子系统动力学行为的影响,利用Newmark?β法对动力学方程进行求解,可获得系统动力学响应。仿真中,转轴、磁流变阻尼器、滚动轴承以及机动飞行参数如表1~4所示。
2.1 机动飞行下转子系统动力学响应分析
无机动飞行时转子系统在圆盘位置处的幅频特性曲线如图7所示。振动幅值随着转速的增大而逐渐增大,并在ω=580 rad/s (92.31 Hz)时达到峰值0.65 mm。当转速ω超过580 rad/s时,随着转速的增大,振动幅值逐渐减小。可以发现,580 rad/s是转子系统的一阶临界转速。
根据一阶临界转速为92.31 Hz,分别设置亚临界和超临界状态下的转速为55.39 Hz(转速比λ=0.6)和129.23 Hz(转速比λ=1.4)。接下来详细分析机动飞行过程中转子系统在亚临界和超临界状态下的动力学特性。
图8所示为λ=0.6和λ=1.4时,机动飞行下转子系统的时域响应。由图8(a)可知,在机动飞行开始时,转子系统在竖直方向上的位移瞬间增加到一个峰值,然后经过几个周期的衰减后稳定到新的平衡位置。当机动飞行结束时,转子系统再次经历该过程,并返回到机动飞行前的稳态响应。这些现象表明机动飞行会对转子系统产生瞬态冲击效应。定义冲击系数IFb和IFe来定量地描述机动飞行开始时和机动飞行结束时的冲击效应:
(18)
式中 Amb和Ame分别为机动飞行开始时和机动飞行结束时转子系统在竖直方向上的瞬时最大位移。Ad和Aa分别为机动飞行期间和机动飞行之后转子系统在竖直方向上的稳态响应幅值。
通过对比分析图8可获得以下结论:
(1) 在机动飞行过程中,转子系统在竖直方向上稳态响应的平衡位置从0 mm变为-0.50 mm,水平方向上稳态响应的平衡位置保持不变。这意味着由机动飞行引起的附加离心力仅影响转子系统在竖直方向上的振动,而没有耦合作用。
(2) 除平衡位置偏移以外,机动飞行产生的附加阻尼会降低转子系统在机动飞行过程中的稳态响应幅值。竖直方向上的振幅从0.11 mm减小到0.06 mm,水平方向上的振幅从0.11 mm减小到0.08 mm,降幅分别约为45.5%和27.3%,这意味着与附加离心力的影响不同,附加阻尼效应具有耦合作用。
(3) 机动飞行期间转子系统在竖直方向上和水平方向上的稳态响应幅值均高于机动飞行前的稳态响应幅值,这表明与亚临界状态不同,超临界状态下的附加阻尼会增大转子系统的振动。
(4) 超临界状态下的IFb和IFe分别为3.62和2.77,低于亚临界状态下的13.00和4.00。这意味着在亚临界状态下运行的转子系统对机动飞行引起的冲击载荷更加敏感。
2.2 磁流变阻尼器支承下转子系统动力学响应分析
图9~11分别为亚临界状态下(λ=0.6),考虑与不考虑磁流变阻尼器作用时,转子系统动力学响应的时间历程图、频谱图以及时频图。
(1) 机动飞行前,由时间历程图可知,与无磁流变阻尼器相比,磁流变阻尼器能为转子系统提供有效的阻尼,使得转子系统在y方向上的振动幅值降低。由频谱图可知,磁流变阻尼器作用下转子系统主要表现为基频成分,且与无磁流变阻尼器作用时相比,基频幅值由0.104 mm降低为0.080 mm,降幅约为23.1%。
(2) 机动飞行中,由时间历程图可知,与无磁流变阻尼器相比,磁流变阻尼器作用下转子系统在y方向上的振动幅值基本保持不变。由频谱图可知,考虑磁流变阻尼器作用时,频谱图中出现2×,3×等倍频成分及非协调频率成分,其中2倍频最为明显。其原因是在机动飞行中,由于附加离心力的影响,使得转子系统在y方向上振动的平衡位置发生大幅偏移,油膜受过度受挤压而非线性增强。
(3) 机动飞行开始和结束瞬态过程中,由时间历程图可知,考虑磁流变阻尼器作用时,机动飞行开始和结束时转子系统在竖直方向上的瞬时最大位移Amb和Ame均减小,Amb由0.78 mm减小为0.73 mm,Ame由0.44 mm减小为0.41 mm。此外,由时频图可知,在机动飞行开始瞬间和机动飞行结束瞬间,除基频外,时频图中还出现了较宽的频率分量,且频率越高衰减越快,冲击引起的宽频分量的能量主要集中在93.30 Hz,接近转子系统一阶固有频率92.31 Hz。原因是机动飞行引起的瞬态冲击负载具有较宽的频带,激发了转子系统的一阶固有频率。考虑磁流变阻尼器作用时,冲击引起的瞬态响应幅值减小,且瞬态响应时间缩短,以上现象说明磁流变阻尼器对机动飞行引起的瞬态冲击效应具有一定的缓解作用。
图12~14分别为超临界状态下(λ=1.4),考虑与不考虑磁流变阻尼器作用时,转子系统动力学响应的时间历程图、频谱图以及时频图:
(1) 机动飞行前,由时间历程图可知,考虑磁流变阻尼器作用时,转子系统在y方向上稳态响应的振动幅值变化微弱。频谱图主要表现为基频成分,且幅值由0.196 mm增大到0.203 mm,增幅约为3.45%。
(2) 机动飞行中,由时间历程图可知,磁流变阻尼器对转子系统振动幅值的影响较弱。频谱图中主要表现为基频成分,且与不考虑磁流变阻尼器作用时相比,基频幅值减小,由0.236 mm减小为0.226 mm,降幅约为4.24%。此外,频谱图中还出现微弱的2倍频成分。
(3) 机动飞行开始和结束瞬态过程中,由时频图可知,超临界转速下,机动飞行引起的瞬态冲击效应会激发转子系统的一阶模态响应,冲击引起的宽频分量的能量主要集中在93.65 Hz,接近转子系统一阶固有频率92.31 Hz,考虑磁流变阻尼器作用时,其响应的幅值变化不明显,但瞬态响应的时间缩短。
如图15所示为亚临界状态下(λ=0.6)机动飞行前和机动飞行中转子系统在竖直方向上稳态响应的级联图。随着电流的增大,磁流变阻尼器对机动飞行前转子系统稳态响应的幅频特性影响较小,而对机动飞行中转子系统稳态响应的幅频特性影响较大。与机动飞行前稳态响应相比,机动飞行中转子系统稳态响应的非线性明显增强。由图15(b)可知,当I≤0.4 A时,随着电流的增大,基频幅值增大,且非线性逐渐增强。这是因为,当电流较小时,磁流变液屈服应力较小,机动飞行产生的附加载荷使得轴颈离心率过大,油膜受过度挤压而产生较强的非线性。当I>0.4 A时,磁流变液屈服应力增大,使得轴颈离心率减小,磁流变阻尼器的阻尼效应起主要作用。随着电流的增大,阻尼力增强,基频幅值逐渐减小,在I=1.0 A时,磁流变阻尼器的阻尼效应最为明显。随后,随着电流的增大,基频振动幅值逐渐增大,非线性逐渐增强。这是因为,当电流较大时,磁流变液屈服应力较大,磁流变阻尼器刚度效应增强并起主要作用,从而限制了油膜的挤压作用,削弱了磁流变阻尼器的阻尼效应,使得振动幅值逐渐增大。同时,在较大电流作用下,磁流变液硬核体积增大,油膜变薄,致使油膜力非线性增强。当I>1.6 A时,磁流变阻尼器对转子系统动力学特性的影响基本保持不变,这是因为,在大的电流作用下,磁流变阻尼器处于准刚性支承状态。
如图16所示为超临界状态下(λ=1.4)机动飞行前和机动飞行中转子系统在竖直方向上稳态响应的级联图。随着电流的增大,机动飞行前转子系统稳态响应的基频幅值逐渐增大,并在I=1.2 A时趋于稳定。与机动飞行前转子系统稳态响应的级联图相比,机动飞行中转子系统稳态响应的非线性明显增强。当电流I≤1.2 A时,随着电流的增大,基频幅值逐渐增大,系统非线性逐渐增强,级联图中出现较为明显的连续非协调频率成分。当I>1.2 A时,系统处于准刚性支撑,振动状态基本保持不变。通过对比图15可以发现,亚临界状态下,磁流变阻尼产生的非线性频率成分主要在基频以上,且出现较为明显的倍频成分。而在超临界状态下,磁流变阻尼产生的非线性频率成分主要在基频以下,且表现为连续频谱现象。
3 结 论
(1) 机动载荷会对转子系统产生冲击效应,使转子系统在机动飞行开始瞬间和机动飞行结束瞬间的振动幅值大幅增大。此外,机动飞行引起的冲击载荷具有较宽的频带,会激发转子系统振动的一阶自然模态。
(2) 在亚临界状态下,磁流变阻尼器能够有效抑制机动飞行前的稳态响应幅值,且对机动飞行引起的瞬态冲击效应具有一定的缓解作用,能够降低瞬态冲击幅值,缩短响应时间。在超临界状态下,磁流变阻尼器对转子系统动力学特性的影响较小。
(3) 在整个机动飞行过程中,通过施加合适的电流能够有效抑制转子系统的振动幅值及缓解机动飞行过程中的瞬态冲击效应,但较大的电流反而会使磁流变阻尼器产生较强的非线性,造成转子系统的失稳,且在机动飞行中,由于油膜被过度挤压,磁流变阻尼器的非线性更为明显。
参考文献:
[1] Han B, Ding Q. Forced responses analysis of a rotor system with squeeze film damper during flight maneuvers using finite element method[J]. Mechanism and Machine Theory, 2018, 122: 233-251.
[2] Lin F, Meng G. Study on the dynamics of a rotor in a maneuvering aircraft[J]. Journal of Vibration and Acoustics, 2003, 125(3): 324-327.
[3] El-Saeidy F M A, Sticher F. Dynamics of a rigid rotor linear/nonlinear bearings system subject to rotating unbalance and base excitations[J]. Journal of Vibration and Control, 2010, 16(3): 403-438.
[4] 祝长生, 陈拥军. 机动飞行时发动机转子系统动力学统一模型[J]. 航空动力学报, 2009, 24(2): 371-377.
Zhu C S, Chen Y J. General dynamic model of aeroengine's rotor system during maneuvering flight[J]. Journal of Aerospace Power, 2009, 24(2): 371-377.
[5] Andrés L S, Rodríguez B. Experiments with a rotor-hybrid gas bearing system undergoing maneuver loads from its base support[J]. Journal of Engineering for Gas Turbines and Power, 2020, 142(11): 111004.
[6] Yu Y, Ding K, Zhao T, et al. Nonlinear dynamics of flexible diaphragm coupling's rotor system during maneuvering flight[J]. The Journal of Strain Analysis for Engineering Design, 2023, 58(3): 236-254.
[7] Gao T, Cao S, Sun Y. Nonlinear dynamic behavior of a flexible asymmetric aero-engine rotor system in maneuvering flight[J]. Chinese Journal of Aeronautics, 2020, 33(10): 2633-2648.
[8] Gao T, Cao S, Hou L, et al. An experimental study on the nonlinear vibration phenomenon of a rotor system subjected to barrel roll flight and coupled rub-impact faults[J]. Measurement, 2020, 153: 107406.
[9] Gao T, Yuan S, Liu P, et al. Vibration behavior of dual-rotor caused by maneuver load and intershaft bearing defect[J]. AIAA Journal, 2023, 61(3): 1396-1410.
[10] Chen X, Gan X, Ren G. Dynamic modeling and nonlinear analysis of a rotor system supported by squeeze film damper with variable static eccentricity under aircraft turning maneuver[J]. Journal of Sound and Vibration, 2020, 485: 115551.
[11] Wang J, Liu Y, Qin Z, et al. Dynamic performance of a novel integral magnetorheological damper-rotor system[J]. Mechanical Systems and Signal Processing, 2022, 172: 109004.
[12] Wang J, Liu Y, Qin Z, et al. Nonlinear characteristic investigation of magnetorheological damper-rotor system with local nonlinearity[J]. Chinese Journal of Aeronautics, 2023: 36(2): 111-126..
[13] Wang J, Zhang X, Liu Y, et al. Rotor vibration control via integral magnetorheological damper[J]. International Journal of Mechanical Sciences, 2023, 252: 108362.
[14] Wang J, Ma L, Zhang J, et al. Mitigation of nonlinear rub-impact of a rotor system with magnetorheological damper[J]. Journal of Intelligent Material Systems and Structures, 2020, 31(3): 321-338.
[15] 罗跃纲, 王鹏飞, 王晨勇, 等. 迷宫密封-滚动轴承-悬臂转子系统非线性动力学特性分析[J]. 振动工程学报, 2020, 33(2): 256-264.
Luo Y G, Wang P F, Wang C Y, et al. Nonlinear dynamic characteristics of labyrinth seal-rolling bearing-cantilever rotor system[J]. Journal of Vibration Engineering, 2020, 33(2): 256-264.
Dynamic characteristics of rotor system with magnetorheological damper during maneuvering flight
Abstract: In the process of maneuvering flight, the aeroengine will bear very harsh working conditions, leading to irregular transient vibrations that can result in failure. In this paper, the effect of a semi-active magnetorheological damper (MR damper) on the dynamic characteristics of a rotor system under maneuvering flight is investigated. The finite element model of the rotor system with MR damper under maneuvering flight is established using the finite element method. The Newmark-β numerical method is used to solve the dynamic equations, and the dynamic characteristics of the rotor system during maneuvering flight are studied. On this basis, considering the effects of MR damper on the transient, the steady state responses of the rotor system under maneuvering flight are analyzed. The results show that transient impact is caused at the beginning and the end of maneuvering flight, which stimulates the first order modal response of the rotor system. The MR damper with suitable current can effectively suppress the amplitudes of transient and steady-state responses of the rotor system during maneuvering flight. In addition, due to the large eccentricity of the journal in maneuvering flight, the MR damper is prone to produce nonlinearity.
Key words: aeroengine; maneuvering flight;magnetorheological damper;rotor system;transient impact
