桥梁水下结构检测机器人设计研究
2024-06-03贾东诺
贾东诺
辽宁工程技术大学土木工程学院 辽宁 阜新 123000
随着基础设施建设的快速发展,桥梁数量不断增加。为确保桥梁安全、保障交通运输顺畅,定期对桥梁进行检测和维护至关重要。然而,桥梁水下结构检测一直面临着诸多挑战,如水下环境复杂、能见度低、作业风险较高等。因此,开发一种适用于桥梁水下结构检测的专用机器人具有重要意义。
1 机器人设计
1.1 机器人类型选择
桥梁水下结构的检测环境通常具有水流湍急、水下能见度低等特点,因此需要选择适应复杂水下环境的机器人。桥梁水下结构检测任务通常包括对桥梁基础、桥墩、桥台等部位的检测和评估。需要考虑机器人是否能够到达所需检测的位置,以及是否能够携带所需的检测设备。水下机器人需要具备良好的机动性,以便能够灵活地在水下运动,适应不同的水下环境。由于桥梁水下结构检测作业的区域和任务时间可能较长,因此需要选择具有较长续航能力的机器人。
基于以上因素,可以选择以下两种类型的机器人:1.缆控水下机器人(ROV):ROV可以携带各种检测设备,适应复杂的水下环境,适用于较长时间、较大范围的检测任务。但是,ROV的运动受到脐带缆长度的限制,且操作相对复杂。2.自主水下机器人(AUV):AUV是一种无需脐带缆连接的水下机器人,可以自主地在水下运动。AUV具有较高的机动性,可以灵活地避开障碍物,适用于大范围、长时间的检测任务。然而,AUV的续航能力通常较ROV弱,需要定期返回水面充电。因此,桥梁水下结构检测机器人可以选择ROV或AUV,具体选择需根据实际作业环境和任务需求来决定[1]。
1.2 机器人结构设计
可以采用流线型设计,以降低水下运动的阻力。可以考虑设计成圆柱体或水滴形,以便更好地适应水流条件。应当设计快速连接的防水连接器,以便在水下更换电池、传感器等部件。可以采用高效节能的推进系统,如propeller或thruster,确保机器人在水下灵活运动。可以考虑使用多推进器设计,以提高机器人的机动性。还可以设计可更换的机械手,以满足不同桥梁水下结构的检测需求。机械手可实现抓取、触摸等操作,以便对桥梁结构进行近距离检测。应当预留足够的空间和接口,以便方便地添加各种传感器,如相机、声纳、姿态传感器等。可以设计高效电池管理系统,确保机器人长时间续航。可以考虑使用高能量密度的电池,如锂电池,并设计快速充电系统。应当建立稳定、低延迟的通信系统,确保机器人与控制端之间的实时交互。可以考虑使用水声通信或无线通信技术。可以为机器人配备高亮度的照明系统,以便在昏暗的水下环境进行清晰的图像拍摄和检测。
1.3 机器人动力系统设计
桥梁水下结构检测机器人的动力系统是确保机器人水下作业的关键组件,工业机器人动力装置组成如图1。通常情况下,水下机器人采用电池作为动力来源。选择高能量密度的电池,如锂电池,可提高机器人的续航能力。可以设计高效的电池管理系统,以监控电池状态、保护电池使用寿命。电池管理系统应具备过充、过放、过热等保护功能。也可以设计快速充电系统,以便机器人在水下作业过程中快速充电。可以考虑使用无线充电技术,提高充电的便捷性。推进系统是水下机器人的重要动力组件,用于实现机器人的水下运动。可以考虑使用高效节能的推进系统,如propeller或thruster。设计动力分配与管理系统,以实现对机器人推进系统、机械手等部件的动力控制。该系统应具备动力切换、动力优先级等功能,以便在不同情况下合理分配动力。通过优化机器人外形、推进系统设计等,降低水下运动的阻力,提高机器人的能源利用率。应当采用节能策略,如速度控制、睡眠模式等,以延长机器人的续航能力。通过以上动力系统设计,桥梁水下结构检测机器人将具备高效的动力表现,满足水下作业的需求。
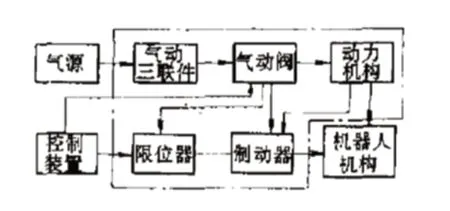
图1 工业机器人动力装置组成
1.4 机器人传感器系统设计
桥梁水下结构检测机器人的传感器系统是实现机器人智能检测的关键组件,传感器系统在工业机器人中的主要工作流程如图2。成像传感器用于采集桥梁水下结构的图像信息。可以考虑使用高分辨率、宽视角的水下相机,以便捕捉清晰的图像。声纳传感器用于检测水下障碍物和桥梁结构,提高机器人水下导航的准确性。可以选用成像声纳或避障声纳,实现水下物体的探测和定位。距离传感器用于检测机器人与桥梁水下结构之间的距离。压力传感器用于监测水下环境压力,以便机器人适应不同的水下深度。水流传感器用于检测水下水流速度与方向,以便机器人应对水流变化,调整运动姿态。环境传感器用于监测水下环境的温度、pH值、浑浊度等参数,以便机器人适应不同的水下环境。可以设计高效的传感器数据融合与处理系统,实现多传感器数据的综合分析。利用计算机视觉、机器学习等技术对采集到的数据进行分析,以识别潜在的结构缺陷和安全隐患。需要设置相应的报警机制,当传感器检测到异常情况(如超过安全距离、水流过快等)时,立即向操作人员报警。
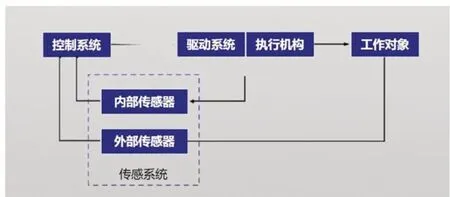
图2 传感器系统在工业机器人中的主要工作流程
2 结构检测技术
2.1 基础知识介绍
桥梁水下结构检测机器人的基础知识涉及多个领域,包括水下工程、机器人技术、传感器技术、通信技术等。需要了解水下环境的特点,如水流、水深、水压等。熟悉桥梁水下结构的类型、材料和损坏模式,为机器人检测任务提供基础。掌握机器人运动学、动力学、控制系统设计的基础知识,以便设计出性能优越的水下机器人。了解机器人硬件组成(如机身结构、推进系统、传感器等)和软件控制系统。可以学习各种传感器的工作原理、应用范围和性能参数,为机器人传感器系统的选型和设计提供依据。应当掌握水下通信技术的原理,如水声通信、无线通信等。了解通信系统的组成和优化方法,提高机器人与控制端之间的通信质量。应当学习水下导航和定位技术,如惯性导航系统(INS)、超声波导航、GPS等。了解各种导航技术的原理、优缺点和适用场景,为机器人水下定位提供支持。需要掌握图像处理和计算机视觉的基本概念、算法和应用。学习如何使用计算机视觉技术对水下图像进行分析和处理,以识别桥梁水下结构的缺陷和隐患。可以学习机器学习的基本概念、算法和应用。了解如何利用机器学习方法对大量传感器数据进行分析,实现机器人对水下结构的智能检测和评估。应当了解桥梁水下结构检测的标准和方法,熟悉各种缺陷类型(如裂缝、腐蚀等)及其评估方法。为机器人检测任务提供评估依据。学习水下安全知识,熟悉机器人水下作业中的安全规定和应急预案[2]。
2.2 检测方法选择
桥梁水下结构检测机器人的检测方法取决于被检测结构的特点、水下环境等因素。以下是常见的检测方法及其适用场景:1.水下视觉检测:利用水下相机拍摄桥梁水下结构的图像,通过图像处理技术对图像进行分析,以识别裂缝、破损等问题。适用于水下能见度较高、结构表面较为平整的场景。2.声纳检测:使用声纳设备扫描桥梁水下结构,通过分析声纳数据生成桥梁水下结构的三维图像,从而检测出结构缺陷。适用于水下能见度较低、结构表面复杂(如钢筋混凝土)的场景。3.激光扫描检测:利用激光扫描设备对桥梁水下结构进行扫描,获取结构的三维模型,以便对结构进行详细分析。适用于需要高精度检测的场景,如评估桥梁水下结构的变形和磨损。4.水下触摸检测:通过机器人携带的机械手或其他触觉设备直接接触桥梁水下结构,以评估结构的磨损、腐蚀等情况。适用于需要对结构表面进行细致检测的场景。5.渗透检测:利用渗透剂检测桥梁水下结构表面的裂纹等缺陷。适用于金属结构表面的缺陷检测。6.磁场检测:利用磁场传感器检测桥梁水下结构内部的钢筋腐蚀情况。适用于评估钢筋混凝土结构的钢筋状况。7.温度检测:通过温度传感器监测桥梁水下结构表面的温度分布,以评估结构的热应力状况。适用于评估桥梁水下结构的热应力和耐久性。
2.3 数据采集与处理
数据采集需要利用水下相机拍摄桥梁水下结构的照片或视频。在高清图像中,可以清晰显示裂缝、破损、腐蚀等缺陷。通过激光扫描设备获取桥梁水下结构的三维模型,为后续分析提供基础数据。利用机器人携带的机械手或其他触觉设备直接接触桥梁水下结构,获取结构表面的质感、磨损和腐蚀等信息。需要对采集到的数据进行预处理,包括降噪、去模糊、增强等操作,以提高数据的质量。利用计算机视觉、机器学习等技术对预处理后的数据进行分析,以识别潜在的结构缺陷和安全隐患。这可能包括对图像进行裂缝检测、对声纳数据进行目标识别、对激光扫描数据进行三维建模等。将分析结果可视化,生成易于理解的报告。例如,将裂缝、破损、腐蚀等缺陷的位置、大小和程度标注在图像或三维模型上,方便评估人员了解桥梁水下结构的状况。根据数据分析结果,生成详细的检测报告,包括现状、问题、建议等。
3 机器人运行与控制
3.1 机器人操作流程
可以根据检测目标、水下环境和机器人性能,制定检测任务和路线。这包括确定检测点位、机器人运动轨迹、设备工作模式等。应当将桥梁水下结构检测机器人放入水中,启动机器人并检测设备状态。确保机器人各系统正常运行,传感器、推进系统等设备正常工作。操作人员可以通过远程操控系统控制机器人,引导机器人按照规划路线行进,执行检测任务。操作人员需要实时监测机器人的状态,根据任务需求和环境变化调整机器人的运动和设备工作模式。机器人需要根据任务要求采集图像、声纳等数据,实时传输到控制端。分析人员对数据进行分析,判断结构缺陷和隐患。如有需要,操作人员可以实时调整机器人的运动和设备工作模式,以便更详细地检测特定区域。可以根据分析结果,生成详细的检测报告,包括现状、问题、建议等。评估人员可以根据报告结果,确定维修方案和优先级。任务结束后,回收机器人并进行维护,为下一次任务做准备。这包括检查机器人的硬件设备、电池状态、传感器校准等,确保机器人性能稳定[3]。
3.2 远程操控系统设计
应当设计直观、易用的用户界面,方便操作人员实时监控机器人的状态和操控机器人。用户界面应显示机器人的运动状态、电池电量等信息,并提供方便的操控按钮和参数调整界面。可以建立稳定、低延迟的通信系统,确保操作人员与机器人之间的实时交互。还可以设计高效的控制模块,实现对机器人的运动、设备控制等功能。操作人员可以通过控制模块实时调整机器人的推进系统、机械手等部件的运动状态,以满足任务需求。设置相应的安全机制,确保机器人在运行过程中避免碰撞、偏离路线等风险。对于需要多台机器人协同作业的任务,远程操控系统应具备多机器人协同控制的功能。操作人员可以同时控制多台机器人,实现任务分配、路径规划、协同作业等功能。远程操控系统应具备一定的数据分析与可视化能力,方便操作人员实时查看和处理机器人采集的数据。数据分析功能可以对传感器数据进行预处理、识别缺陷等操作,而可视化功能可以将分析结果呈现给操作人员,便于决策。
3.3 自主导航和路径规划
机器人需要通过传感器(如惯性导航系统、声纳等)了解自己在水下的位置和姿态。定位的精度和准确性对自主导航和路径规划至关重要。机器人需要了解水下环境的信息等。通过传感器(如水下相机、声纳等)获取的环境信息可以帮助机器人更好地规划路径,避免碰撞。路径规划算法需要考虑多个因素,也需要根据规划好的路径,机器人自主控制推进系统,沿着路径行进。在导航过程中,机器人需要不断地根据传感器信息调整位置和姿态,以实现精确定位和避障。在实际导航过程中,环境可能会发生变化(如突然出现的障碍物)。在这种情况下,机器人需要能够实时更新路径规划,以确保顺利完成任务。机器人需要实时评估导航和路径规划的效果,对路径进行实时调整。这包括检查机器人位置误差、姿态误差以及与障碍物的距离等。应当整合多种传感器数据(如定位、声纳、成像等),以提高机器人对环境的感知能力和导航性能。
4 结语
综上所述,智能桥梁水下结构检测机器人的成功研制为桥梁检测领域带来了新的技术突破。随着技术的不断发展和完善,这类机器人将在更多的桥梁工程中发挥重要作用,为保障桥梁安全、延长桥梁使用寿命做出贡献。
