煤矿辅助运输的技术要点与发展分析
2024-06-02王树伟吴宝林
王树伟,吴宝林
(西北矿业平凉五举煤业有限公司,甘肃 平凉 744200)
煤矿辅助运输主要承担着煤矿开采作业中有关人员和物料的运输任务。随着新时期煤矿井下作业技术水平的不断提升,对煤矿辅助运输的规模、效率也提出了更高的要求。为了保障煤矿辅助运输的质量效率和安全,应能够结合当前煤矿运输作业的实际情况,明确煤矿辅助运输技术的应用重点。对煤矿辅助运输的技术要点与发展进行分析,能够为煤矿辅助运输的现存问题提供解决和发展的思路。
1 煤矿辅助运输的技术要点
1.1 运输牵引运行机制
煤矿辅助运输主要借助连续牵引装置实现,而连续牵引装置以连续牵引技术为基础。当前常用于煤矿辅助运输的牵引装置,以无极绳牵引卡轨车为代表。在实际的煤矿辅助运输过程中,以无极绳绞车作为辅助运输牵引装置的主要动力源,在由电动机为其提供运转动力的前提下,借助减速带带动绞车滚筒旋转,同时,也能够实现对绞车滚筒转速的调节和控制。然后,依据滚筒与钢丝绳之间的摩擦力,让绞车滚筒带动钢丝绳旋转,进而搭配合适的运输车辆,实现对矿井上下物料的运输目的。利用该技术,能够满足煤矿井下斜坡以及直角等位置的安全清理目标和要求,对提升煤矿辅助运输作业的效率具有重要的作用。在这一过程中,通过改变牵引力的方式,能够有效实现对运输设备运输速度和能力的调整。为了保障运输牵引机制的安全稳定运行,要求在实际应用该技术时,加强对牵引电机能力以及牵引钢丝使用承受能力的监测关注,避免出现牵引力不足的情况。
除运输牵引装置外,针对煤矿辅助运输的主要对象,煤矿辅助运输技术应用还要求能够提高对巷道架空和高速架空的重视。巷道架空强调能够结合煤矿井下空间的实际情况,依据辅助运输所需的空间大小,选择在巷道内部一侧进行巷道架空设计,在能够保障人员安全运输的同时,也能够尽可能减少因辅助运输而占据的井下空间。而在高速架空方面,要求能够选择与辅助牵引装置型号相符合的减速器和速度控制器设备类型,有效发挥其在调整控制辅助运输速度方面的作用。为保障辅助运输的运行安全和效果,要求能够事先做好针对各类应急事件的预案,降低各种突发故障对煤矿辅助运输作业安全和效率产生的影响。
1.2 运输空间规划改造
煤矿辅助运输作业容易受到煤矿井下作业环境的影响和限制。为了提升煤矿辅助运输作业的实际效果,应能够通过对运输空间的规划改造,营造更适于煤矿辅助运输的作业环境。例如,对一些特殊地形的煤矿井下开采区域,可以通过增加坡度等方式来对其进行改造。在结合煤矿井下作业实际情况来设计煤矿辅助运输系统时,应能够综合考虑煤矿井下的空间布局情况,确保煤矿辅助运输系统能够与煤矿井下作业环境相互契合,以此提高辅助运输的灵活性。这一过程中,应以保障煤矿辅助运输的安全为主要原则,为煤矿辅助运输作业开展奠定良好的空间环境基础。
1.3 平衡运输速度安全
运输速度和运输安全是煤矿辅助运输作业开展中需要考虑的两个重点问题。在情况辅助运输作业中,应能够兼顾运输速度与安全,平衡二者之间的关系,以此发挥煤矿辅助运输技术的作用价值。从这一方面来看,结合当前我国煤矿开采作业的整体情况,要求能够通过对煤矿辅助运输作业情况的有效管理和控制,尽可能减少煤矿辅助运输作业中的人为失误和其他问题。这一过程中,应能够发挥实时监控系统技术的作用,实现对整个煤矿辅助运输过程的监控。
2 煤矿辅助运输技术发展
在煤矿开采作业中,煤矿辅助运输实际涉及的运输环节较多,运输内容也较为复杂,再加上其本身容易受到井下作业环境情况的影响,需要加强对于煤矿辅助运输作业效率和安全的重视。在新时期的背景下,结合当前先进科学技术的发展趋势背景,应能够促进先进技术与煤矿辅助运输技术的有效融合,尝试将先进的科学技术应用到煤矿辅助运输系统运行过程中,从而进一步提升煤矿辅助运输作业的实际效率和效果。基于此,提出煤矿辅助运输技术的发展方向和趋势,主要包括以下几方面内容。
2.1 自动化辅助运输
推动煤矿辅助运输系统朝着自动化和智能化的方向发展,能够代替人工,以远程监控管理的方式实现对煤矿井下辅助运输作业的管理和控制。基于这一目标,可以设计用于煤矿井下作业的自动化辅助运输系统,将传感器安装于辅助运输车辆,实现对井下运输作业环境的感知和检测。在传感器获得针对井下作业情况的环境数据后,由安装于车辆内部的动态控制模块,实现对于井下辅助运输车辆运行路径的合理规划,进而生成相应的车辆控制指令,从而帮助煤矿辅助运输车辆学校避障和换道,保障辅助运输的效率效果。
具体而言,安装传感器应以适应煤矿井下复杂工况为主要目的,能够应用视觉、激光雷达等多元融合感知技术,结合传感器本身的物理特性来得到更能够真实反映井下作业环境情况的感知结果。这一过程中,传感器应具备动态障碍物检测跟踪、运输道路特征信息提取、无人料车空重载分析等方面的功能。而安装与运输车辆的控制模块则应以事先设定好的的控制程序为依据,控制程序可以应用激光雷达感知算法、毫米波雷达感知算法等来对井下作业环境中的目标信息进行检测。在应用控制程序的基础上,还应能够设计基于多传感器的融合模块,能够将不同类型的传感器感知的结果进行融合汇总,以便能够更全面的感知煤矿辅助运输的井下环境。
在自动化辅助运输系统的设计开发过程中,还应能够具备依赖传感器获取信息来绘制高清井下地图的功能。在从传感器获取井下作业环境信息后,可以通过提取环境中的各类语义元素和多层次组织结构来设计高精度井下地图。这一过程中可以引入高清地图软件,将其与自动化辅助运输管理控制系统结合起来,在得到的高清地图中显示井下环境障碍物数据、监测点实时数据、车辆实时位置以及车辆历史轨迹等方面的数据内容。
除此之外,自动化辅助运输系统还应能够具备路径规划的功能,确保运输车辆在实际运行中能够实现自主避障。这一过程中,应考虑运输车辆的实际运行情况,以设计动态路径规划方案的方式,应用规划算法来为运输车辆提供安全系数最高且能量损耗最少的规划路径,以便能够在实现对于辅助运输自动控制的同时,也能够保障辅助运输的治疗效果。
2.2 无轨道运输
常用于煤矿辅助运输的方式,以有轨道电机车和轿车运输为主。这些运输方式虽然能够在一定程度上满足井下人员和物料的运输需求,但容易受到井下作业环境以及其他方面因素的影响,存在运输速度慢、运输量劳动方面的问题。在先进科学技术不断发展的背景下,无轨胶轮车逐渐被用于煤矿辅助运输作业,这种运输方式能够适应更复杂的煤矿运输作业环境,在实际应用中也呈现出了良好的应用优势,已经成为当前煤矿辅助运输的主要发展方向和趋势之一。
具体而言,无轨胶轮车主要基于制动系统的原理来发挥作用,以无轨胶轮车为主要辅助运输车辆的制动系统,具体包括压缩机、油水分离器、单向阀、制动储气室、前轮制动气室、制动控制阀、后轮制动气室以及管路和踏板构成。为了发挥无轨胶轮车在煤矿辅助运输作业中的作用,需要综合考虑无轨胶轮车适用的地质条件,再对是否应用于轨交轮车进行煤矿辅助运输作业进行综合判断。
无轨胶轮车在实际应用中能够体现出较多的应用特点和优势。例如,应用无轨胶轮车的辅助运输效率更高,该运输车辆对路面质量的要求较低,在将井下作业的相关设备装上车后,无须经过其他环节,便可以直接将相应设备运输至采掘工作面的附近,能够以更简化的程序和更高的效率来缩短实际进行辅助运输的时间。无轨胶轮车也拥有更高的安全系数,无轨胶轮车在实际应用过程中,能够以点对点运输的方式,同时搭配自动防撞装置结构(如图1 所示),来保障运输车辆的运行安全和稳定性效果。
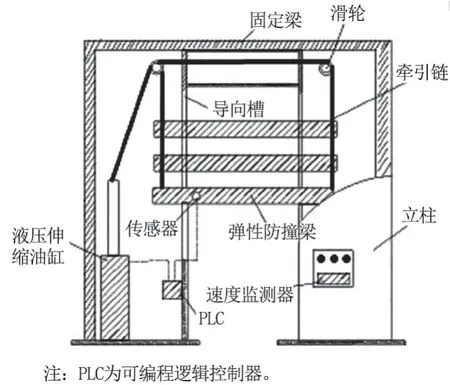
图1 无轨胶轮车自动防撞装置结构
现阶段,无轨胶轮车主要应用于坡度在12°以内的矿区,能够依据井下实际作业环境的不同,选择合适的无轨胶轮车类型来发挥作用。当无轨胶轮车运行的巷道坡度在6°左右时,则无轨胶轮车的实际运行距离最长为1.2km,且这一过程中需要确保巷道局部的纵向最大坡度在14°以下。同时,应用无轨胶轮车也对巷道底板的抗压强度有着一定的要求。无轨胶轮车在运行中会对巷道底板产生范围在0.3 ~0.7MPa 内的压强,若实际井下辅助运输环境中巷道底板的岩性较差,就会对无轨胶轮车的应用产生一定的限制。
结合推动煤矿辅助运输自动化和智能化发展的方向,在煤矿辅助作业中,尝试将无轨胶轮车等装置设备,与自动化、智能化的辅助运输系统结合起来,更好地克服以往煤矿辅助运输中存在的问题,提升辅助作业的实际效率,让其能够为推动煤矿生产作业的发展提供更有效的支持。
2.3 运输装置与系统优化
煤矿辅助运输技术的应用,需要能够结合煤矿井下作业的实际情况来进行优化调整,才能够确保其在煤矿生产作业中发挥更大的作用。在这一前提下,对煤矿辅助运输技术的应用研发,应能够结合具体的煤矿开采作业情况来进行规划。考虑现阶段煤矿开采作业中应用的煤矿辅助运输系统大多仍以运输牵引装置为主,促进煤矿辅助运输技术的发展,也应考虑通过对运输牵引装置的优化来实现。
从这方面来看,可以将无轨辅助运输装置与自动化途中运输系统结合起来,依次为依据来对运输牵引装置进行优化调整。例如,在某矿区的井下辅助运输作业中,为提升煤矿辅助作业的实际效果,该矿区规划了两种不同的辅助运输系统方案。第一种方案为应用无轨胶轮车配合架空乘人装置的方式,分别进行物料和人员的运输;而第二种方案则以单轨调运物料配合架空乘人装置的方式来进行辅助运输。
在考虑该矿区井下作业大巷道坡度较缓的情况下,应用第一种方案,无须对巷道进行大规模改造,仅需要对局部顺槽巷道坡度较大的位置进行适当调整,能够体现出良好的灵活性和运输效率。应用该方案的限制条件为尾气排放可能会造成环境污染,且方案运行所需的费用较高;应用第二种方案尽管不会受到底板条件的限制,但由于该方案需要依靠稳定的吊轨悬吊承力装置发挥作用,其对巷道顶板的质量提出了更高的要求,需要通过对巷道的大规模改造,让巷道的净高度提升至4.0m以上,才能够满足井下辅助运输的需求。
该矿区在综合考虑两种方案应用优势与限制条件后,最终选择以无轨胶轮车配合架空乘人装置的方式,实现煤矿辅助运输。
在确定煤矿辅助运输的基本方案后,进一步对煤矿辅助运输系统进行设计分析,要求能够结合物料以及人员的总体运输流程、井下作业的情况来确定应用的无轨胶轮车型号。例如,运输各类散装物料,主要选择应用WCJ5E(C)/WCJ8E(C)型生产指挥车;小型设备检修应用WCJ5QE(A)型检修车;井下生产指挥、人员运输主要选择应用WC5/0.5 型生产指挥车。在此基础上,进一步对煤矿辅助运输及人员系统进行优化调整。
3 结语
综上所述,煤矿辅助运输技术水平的高低,会对煤矿井下开采作业的质量效果产生直接的影响。在明确煤矿与辅助运输技术基本应用原理的前提下,应能够重点针对当前煤矿辅助运输技术应用存在的问题和限制,以进一步提高煤矿辅助运输效率和保障安全为主要目的,推动煤矿辅助运输技术朝着自动化、无轨道和高质量的方向发展,以此更好地为煤矿开采作业服务。
