基于数据驱动控制的孤岛微网中电池储能系统研究
2024-05-30郑剑波
朱 阳,郑剑波
(国网浙江省电力有限公司临海市供电公司,浙江 临海 317000)
0 引言
随着全球能源需求的增长和对绿色发展的日益重视,可再生能源的开发利用成了能源转型的主要方向。其中,孤岛微网作为一种新型的能源系统,以其分布式、灵活性、可靠性等优点,在偏远地区、海岛等地得到了广泛的应用。在这种系统中,电池储能系统(Battery Energy Storage System,BESS)发挥着至关重要的作用,因为它可以提高系统的供电质量和稳定性,增加系统的可再生能源利用率,减少对传统能源的依赖。孤岛微网中的BESS面临着许多挑战,如不确定性、波动性和随机性等,这些挑战使得传统的控制方法难以达到理想的效果。数据驱动控制作为一种新型的控制方法,已成为研究的热点。数据驱动控制主要利用系统的历史数据和实时数据,通过数据分析和模式识别,建立系统的数学模型,据此设计控制器。与传统的基于数学模型的控制方法相比,数据驱动控制不需要详细的系统模型,具有较强的适应性和鲁棒性。在孤岛微网中,数据驱动控制可以应用于BESS的充放电控制、状态估计、能量管理等方面[1-3]。
1 数据驱动网格支撑逆变器
使用数据驱动的方法来调谐电压和频率控制器,直接替代反向下垂控制品,使其能够在不修改现有BESS有功功率和无功功率内部控制回路的情况下达到改造目的。本文提出的数据驱动的指导支持(Data Driven Guidance Support,DDGS)控制器允许控制增益的频率依赖性,进而显著改进下垂控制,而下垂控制仅应用于所有频率的误差信号的固定控制增益,DDGS控制系统设计过程概述如下。
1.1 控制结构
本文提出的DDGS控制系统与反向下垂支持控制(Reverse Droop Support Control,RDSC)系统相比,下垂增益由传递函数KDD1(z)和KDD2(z)代替,得出本文形式的固定结构传递函数。
(1)
上式,xm,m=0,1,…,m是分子参数,yn,n=0,1,…,n是分母参数。
因此,与具有2个参数的反向下垂电网支持控制系统相比,提出的DDGS控制系统具有2个(m+n-1)参数。整数m和n由设计系统定义,允许适时选择调整,当与下垂控制器相比时,本结构控制器的高阶算法使得其调谐时,改善了BESS对频率和电压瞬变的响应,为了调整DDGS控制器,使用了一种基于优化计算的方法。此外,在直接离散时域中进行调谐,不会引入由于控制器离散化引起的误差。
1.2 信号注入的数据采集
用于识别电力系统的随机噪声信号的注入已使用较为广泛,其中,注入低电平伪随机噪声以调制高压直流互连电网上的功率流。信号注入对电网运行的影响较小,定期将此信号注入系统可行。本文的DDGS控制系统使用了信号注入方法来识别该系统。DDGS控制系统设计的第一步是识别电力系统的频率响应数据。为了收集数据,使用注入的伪随机二进制序列(Pseudo-Random Binary Sequence,PRBS)来激励微电网[4-5]。PRBS是重复的离散二进制序列(仅取2个值),其功率谱密度近似于白噪声的功率谱密度。由于PRBS包含多个频率分量,通过注入PRBS并测量系统的输出,其频率响应特性通过计算得到。使用长度为q的线性反馈移位寄存器生成PRBS,根据以下方法定义最大序列长度L。
L=2q-1
(2)
在将PRBS应用于系统之前,它被缩放为具有双极振幅A。识别采样周期Ts决定了最大激励频率,而±A的激励幅度定义了所施加控制输入的幅度。为了进行识别,用PRBS依次激励BESS、Pg和Qg的控制输入,同时记录测量输出的角频率响应ωt和电压响应vt。该过程重复两次,Ts的值不同,以提高低频范围内的频率响应分辨率,所得数据用于调谐DDGS控制器。数据采样时间步长为Ts,为了提高噪声抑制,采用p个周期的PRBS,每个数据集的样本数为:
Ns=p(2q-1)
(3)
其中,移位寄存器的长度q为14,保证了频率响应数据的足够分辨率。如果q减少,则记录长度和数据采集时间都会减少。然而,频率响应数据的分辨率也降低了,即,对于q=10,Ts1和Ts2的分辨率分别为0.977 Hz和0.244 Hz,为找到所需的分辨率,首先用低值q=10来识别系统,然后检查任何谐振频率周围的数据点的数量。如果数据点在谐振频率周围是稀疏的,则q增加。
1.3 响应数据
对使用PRBS信号注入收集的时域识别数据集进行处理,以找到系统的2×2多输入多输出频率响应数据。系统频率响应数据将BESS的控制输入u与逆变器y测量的系统输出相关联。因此,频率响应包括共振频率功率控制器、测量传感器和微电网系统的行为。
为了找到多输入-多输出频率响应数据G,使用频谱分析方法对收集的数据集进行处理,传递函数如下。
(4)
上式,Ruu是PRBS输入的自相关量,Ruv是PRBS输出和测量的系统输出的互相关量,G(jω)是多输入多输出频率响应数据G的对应元素,DFT是离散傅立叶变换算法,得出2组多输入-多输出频率响应数据,即1组和2组,每组具有L/2个频率点,1组和2组的频率点分别具有2/LTs1Hz和2/LTs2Hz的线性间隔长度。
本研究构造了一组分辨率提高后的频率响应数据。1组覆盖了比2组更宽的频谱。因此,从2组中获取的点被截断以覆盖从0 Hz到1 Hz的范围,被附加到1组,以便增加频率响应数据在低频下的分辨率。因此,构建了一套完整的系统频率响应数据G。随着发电机、负载和电缆的添加或移除,微电网可能会在其使用寿命内发生变化,导致影响此类频率响应。当调整DDGS控制器时,在增强性能和鲁棒性之间存在权衡,如果在不考虑鲁棒性的情况下对控制器进行调谐,当微电网的频率响应发生显著变化时,性能会下降。由于提出的方法允许在不含动态模型或进一步稳定性分析的情况下对控制器进行调谐,因此重新调谐过程被简化。此要求对任何其他非自适应控制系统都相同。
2 实验研究
使用软件在微电网环试验台对所提出的DDGS控制系统进行了验证,试验台在实时模拟器中使用处理器卡实现。它由一个实时模拟的电力系统组成,该系统与DDGS控制系统的自定义固件实现接口。RTDS允许实时解决电磁暂态网络模型。
2.1 负载阶跃
实验开始,电力系统处于稳态,没有负载变化。在时刻t=0.5 s,附加一个250 kVA的负载,连接到微电网。图1显示了负载阶跃期间BESS终端的实际功率和频率,图中曲线1表示RDSC控制系统,曲线2表示DDGS控制系统,下同。可观察到,与RDSC控制系统相比,DDGS控制系统的BESS的有功功率增加更快,峰值放电更高。随后,频率最低点从46.96 Hz增加到47.82 Hz。此外,阶跃后频率振荡得到显著缓和,相应地,2%的稳定时间从7.24 s减少到3.15 s。图2显示了负载变化期间在母线处测量的电压以及BESS的无功功率输出。可以观察到,负载的切换导致网络上持续约2 ms的大电压骤降,这是由于发电机的电磁响应。对于DDGS和RDSC控制系统,这种下降几乎相同。由于时间较短,在下降之后,对于2个控制系统都观察到母线电压的低频振荡。DDGS控制系统减少,振荡较小。
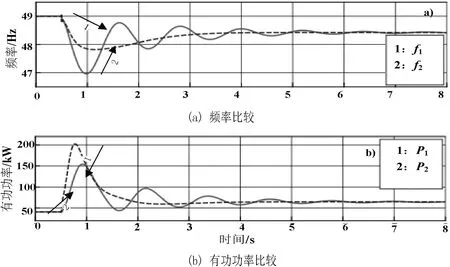
图1 负载抑制测试

图2 负载阶跃测试
2.2 负载抑制
为测试DDGS 在BESS控制系统的负荷抑制情况下的性能,将RDSC和DDGS控制系统进行比较。最初,电力系统处于稳态,在t=0.75 s的时刻,实施负载断开3 s。图3显示了在BESS终端测得的频率和负载抑制期间BESS的实际功率输出,改进的DDGS控制器将频率偏差降低了2.79 Hz。图4显示了抑制负荷期间母线处测得的电压以及BESS的无功功率输出。可以观察到,与RDSC控制系统相比,DDGS控制系统减少了由负载的重新连接引起的网络上的电压暂降,效果较好。

图3 负载抑制测试
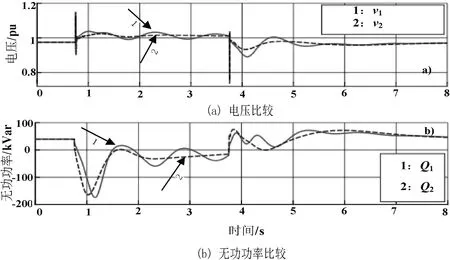
图4 负载抑制测试
3 结语
本文提出了一种用于连接到孤岛微电网的BESS的数据驱动电网支持控制系统,使用该数据驱动算法实现系统地调整控制器的参数。文章提出的数据驱动控制系统能够对孤岛微电网的频率和电压振荡进行抑制。与目前的最新技术相比,本研究提出的控制器允许频率和电压控制器参数的协同优化,无需动态系统模型。
