基于多源信息融合的列车定位方法研究
2024-05-30刁艳美
刘 颂,刁艳美
(南京工业大学浦江学院,江苏 南京 211222)
0 引言
列车定位技术在铁路运输中起着至关重要的作用,对提高铁路运输的安全性、准确性和效率具有重要意义。随着科技的进步,通信技术水平不断提高,列车载运量持续加大,列车的发车时间间隔也越来越短,为保证行车安全,列车的定位精度也应随之提高。然而,单一的列车定位方式无法满足高精度、适用范围广的列车定位需求,为了提高列车定位精度,本文研究了基于多源信息融合的列车定位方法,通过多渠道获取列车定位信息,并能通过轨旁设备实现对传感器定位信息的自校正,从而提高列车定位精度和性能。
1 列车定位方式
列车主要通过轨旁设备定位、传感器设备定位和卫星定位方式获取列车位置信息。定位方式主要包含单一列车定位方式和组合列车定位方式。
1.1 单一列车定位方式
(1)轨道电路。
基于轨道电路的列车定位方法是列车定位中最常用的方法,通过将轨道划分为不同的区段,并在不同区段的开始和结束处,增加发送和接收单元,形成一个信息回路。该方法可以检测某个区段是否被列车占用,但是其定位精度与轨道区段长度有关,定位精度低,误差较大[1]。
(2)计轴设备。
计轴设备可以检测列车通过铁路上某一点的车轴数以及2个计轴点之间或轨道区段内的占用情况。该设备可以确定列车某个瞬间的具体位置,并能自动校正列车行驶里程,但难以做到对列车的实时定位。
(3)查询/应答器。
按照一定的间隔将设备放置在轨道线路沿线,当列车经过地面上的应答器时,车载查询器就会读取其中的数据,以确定列车的位置。然而,这种方式只能进行某些点的定位,不能对列车进行连续定位,不能满足移动闭塞的要求。
(4)测速定位。
测速定位是通过测速装置对列车的瞬时速度进行连续测量,并对瞬时速度进行积分或者求和,求得列车的位置。然而,由于列车存在空转和打滑的情况,一般辅以其他精准定位方式对列车的行驶里程和位置进行更新校正。
(5)惯性导航。
惯性导航是利用陀螺仪和加速度计测定运载体位置的系统。该系统完全自主,必须精确地知道导航起始时运载体的位置,然后使用惯性测量值估算运载体启动之后所发生的位置变化。惯性导航短期精度和稳定性好,但导航信息误差会累积,长期精度差,且价格昂贵。
(6)新型卫星导航定位方式。
新型卫星导航定位方式利用卫星资源的突出优势,激活并优化众多铁路系统基于位置的应用服务,增强列车定位的精确性、完好性、连续性、覆盖度等。然而,局限于民用定位精度问题,当列车通过隧道、坡道、弯道时,卫星定位结果与实际列车位置的偏差较大。因此,单一使用卫星定位会造成列车定位精度下降,导致列车追踪效率下降等[2-3]。
传统的单一定位方式存在定位精度低、机动性差、维护难等缺点,导致了成本与性能之间的矛盾,制约了性能效益的实现。新型卫星导航方式定位精准,但其应用场景受到严苛的条件限制,因此,单一定位方式不能满足高精度、适用范围广的列车定位需求。当下列车定位方式多采用2种及以上定位方式相互组合,由此来实现对列车的精准定位。
1.2 组合定位方式
(1)速度传感器、多普勒雷达、应答器组合定位。
2个速度传感器分别安装在列车车轮上,通过应答器天线与地面应答器连接,是主要的速度测量装置。多普勒雷达属于一种辅助测速装置,通过发射电磁波实现测速功能,主要用于检测列车的空转和滑行,校正测速误差,提供更准确的测速信息和位置信息,确定车辆的行驶距离和方向。应答器天线则是用来接收多普勒雷达的回波信号以获取列车相对坐标的设备。
(2)速度传感器、加速度计组合定位。
在列车两端的不同轴上,安装2个单独的速度传感器,以测量车轮的速度并相互校验;在列车两端安装2~3个加速度计,以测量加速度信息并比较多个加速度计的测量数据,确认输出的有效性并提高可用性。速度传感器、加速度计的应用可以实现列车的精确定位与监控。列车正常运行时,车轮若没有打滑,车载控制器可以使用速度传感器的信息计算列车的速度;车轮若发生了打滑,车载控制器能利用加速度计的数据计算列车空转、滑行前的速度,从而得到当前列车的速度和位置,然后在空转、打滑结束后,将速度和位移的测量值切换回速度传感器。然而,该组合定位方式容易对定位误差进行累计,导致定位精度下降,因此,需要选取合适的定位方式进行组合,才能实现对列车的精准定位[4]。
2 多源信息融合定位方法
针对单一定位精准度较低、传统组合定位方式受环境影响较大的问题,本文提出了基于轮轴速度传感器、加速度传感器,并用轨道电路和查询/应答器对定位精度进行校正的信息融合列车定位方法。
多传感器信息融合是依据某种准则合理地支配与使用多个传感器在空间和时间上的观测信息,以获得更精确、更可靠的定位效果[5]。信息融合方法需要建立系统的整体模型和各个传感器的测量模型。整体模型用来处理各个传感器的观测信息,进而求出系统的最优估计,以得到较高的定位精度[6]。
2.1 基于多传感器的信息融合列车定位方案
基于多传感器的列车定位方案具体实施方法为:首先,在列车上安装2个轮轴速度传感器、2个加速度传感器以获取基准列车定位信息。其次,信息通过信息传感器处理传送至信息采集模块,同时将轨旁的轨道电路和查询/应答器的位置信息传递给信息采集模块,实现信息的同步处理,获取列车的大概位置信息。再次,利用轨道电路和查询/应答器对多源传感器的测量位置信息进行更新。最后,利用信息融合算法对轮轴速度传感器和加速度传感器的信息数据进行不断更新与校正,获取列车的精准位置信息。方案实现如图1所示。
2.2 轮轴速度传感器定位
在列车不同轮轴上安装多个独立的速度传感器来测量轮轴速度,并将测得的速度信息传递给信息采集模块。轮轴测速原理为:测速发电机安装于轮轴上,发电机产生的电压频率和列车的速度呈线性关系,如下式所示。
v=πDfd/Z
式中:
v——列车速度;
Z——发电机极数;
D——车轮直径;
fd——发电机产生的频率。
在频率与电压转换后,v被转换成电压,输出电压和转速之间存在线性关系。当车轮转动方向发生改变时,输出电压的极性也相应发生改变。
就脉冲速度而言,带有传感器的车轮每旋转一周,一定数量的脉冲或方波信号就会被发生器输出。列车速度应与脉冲的频率成正比或者和方波的频率成正比。
v=πDfm/N
式中:
N——车轮旋转1周所计脉冲数;
fm——输出脉冲的频率。
由于自身测量精度和机械安装的影响,脉冲计数会存在一定误差,一般比较小。车轮的空转、打滑和车轮直径磨损引起的误差,是轮轴测速传感器的主要误差,一般比较大。此外,磨损车轮直径变化也会影响到列车的定位精度,并且位置误差会不断累积,因此需要在定位过程中对以上误差进行校正。
2.3 加速度传感器定位
列车发生打滑和空转容易对通过速度和车轮计算出来的数据造成影响,但是对加速度带来的影响几乎可以忽略。在列车定位过程中,为了消除空转打滑带来的误差,加入了一种能对列车位置误差进行校正的装置——加速度传感器,也是城市轨道交通中常用的列车定位方式之一。加速度传感器主要利用伺服力平衡原理,列车如果沿着运动方向加速时,加速度传感器内部的质量平衡块会产生一定位移,由相应的电路将位移转化为电压输出,就可以得到列车的加速度值。
列车的加速度测量方程如下所示。
aA(t)=a(t)·cosθ(t)+g·sinφ(t)+εA(t)+NA(t)
式中:
aA(t)——列车测量的加速度;
a(t)——实际列车的加速度;
g——重力加速度;
θ(t)——加速度计在水平面与列车加速度方向的角度安装误差;
φ(t)——加速度计在垂直面和列车加速度方向的角度安装误差;
εA(t)——固有测量误差;
NA(t)——随机测量误差。
其中,θ(t)、φ(t)与加速度传感器安装有关,可视为一个固定值。
2.4 轮径矫正方法
列车的启动、正常行驶和制动过程中都会存在摩擦现象,随着车辆投入使用时间的增加,轮对磨损也越来越严重,这会导致轮对周长的改变,在计算列车位置信息时,造成一定程度的误差。现有车载设备已具备自动检测更新功能,主要原理是根据列车从查询/应答器获取的具体列车位置信息与速度传感器所测位置信息,反推得到列车车辆轮径尺寸,从而更新车辆轮径信息。
2.5 数据采集分析方法
信息采集模块可以同时获取列车上2个速度传感器和2个加速度传感器的数据信息,并且同时从车载设备上获取轨道电路定位信息和查询/应答器位置信息。对获取的多源信息进行数据融合处理,得到精准的列车位置信息。数据分析步骤如下。
步骤1:信息采集模块同步接收速度传感器1和2的轮轴速度信息,根据此信息分别计算列车运行速度。同时,每隔一定时间,接收加速度传感器1和2的数据信息,分别计算列车加速度值,并根据加速度值计算列车速度信息。
步骤2:判断步骤1中速度传感器所得速度信息是否一致。若一致,则可计算列车当前位置的基本信息,否则,进入步骤3。判断步骤1中加速度传感器所得速度信息是否一致。若一致,2个加速度传感器工作正常,否则,进入步骤4。
步骤3:根据步骤2加速度传感器所得正常速度信息计算列车当前速度,并得到列车当前位置的基本信息。
步骤4:根据轨道电路和查询/应答器获取列车位置信息。
同时,轨道电路和查询/应答器在获取精准信息时及时对传感器数据进行更新校正。更新校正过程如下。
步骤5:根据轨道电路和查询/应答器获取列车位置信息,与步骤2或3得到列车位置信息进行判断,若位置信息一致,则无需更新,得到列车当前位置信息。否则进入步骤6。
步骤6:根据查询/应答器和轨道电路获取的精准位置信息可反推列车轮径,将轮径信息及时反馈给4个传感器,4个传感器对数据进行更新校正。返回步骤1。
数据融合流程如图2所示。

图2 数据融合流程
3 方案验证与数据分析
本文采用仿真系统对方案进行验证,在仿真软件中提前设置好加速度传感器1 和2及速度传感器1和2的误差范围为0~1.2 km/h,并把轮对直径设置为已经磨损15 mm,列车信息采集时间为100 ms,轨道电路长度为300 m,2个车站之间增设1个查询应答器。通过采取单一速度传感器列车定位方式、加速度传感器列车定位方式、基于多源信息融合的列车定位方式进行多轮实验,得出的误差曲线如图3所示。
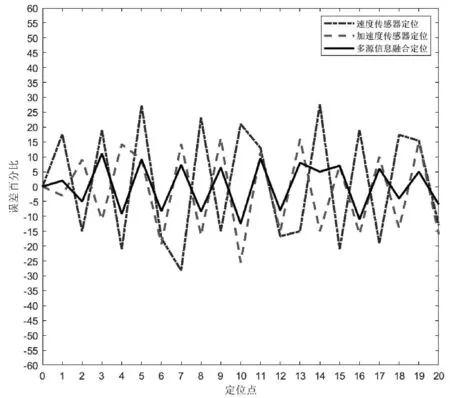
图3 3种定位方式仿真误差曲线
从仿真实验结果可知,无论是采用速度传感器的列车定位方式,还是采用加速度传感器列车定位方式,产生的相对误差都比较大,而且这种误差受传感器自身因素和安装方式的影响,只采用单一定位方式难以消除此类误差。
采用基于速度传感器、加速度传感器与轨道电路、查询/应答器多源信息融合列车定位方式,产生的误差比例相对较小。由此可以看出,采用组合定位方式,尤其是轨旁设备数据信息(轨道电路、查询/应答器)可以适当校正传感器的数据信息,防止误差持续累积。另外,基于速度传感器、加速度传感器与轨道电路、查询/应答器多源信息融合列车定位方式有多个传感器同时工作,不仅可以降低误差率,还能在某个传感器出现故障时实现热备冗余,提高了定位信息的可靠性和可维护性。
4 结语
本文通过研究基于多源信息融合的列车定位方法,从精确性、连续性、可维护性及安全性多方面提高了列车定位性能。多传感器信息融合列车定位算法,通过收集不同传感器实时信息,计算列车运行方向的速度、加速度信息、位移,与查询/应答器或轨道电路位置信息实现数据信息融合,充分发挥不同定位方式的特点,提高列车定位精度。在未来的研究中,笔者将进一步优化多源信息融合方法,改进数据融合算法,提高列车定位技术在实际应用中的性能。
