有限双极性软开关焊接电源仿真研究*
2024-05-27李喜良黄鹏飞
李喜良,黄鹏飞,刘 飞
(北京工业大学 材料与制造学部,北京 100124)
焊接技术是现代制造工业的关键工艺技术,对于有大功率需求的焊接电源来说,一般选择全桥的拓扑结构,但是大功率逆变电源多采用IGBT开关器件,存在严重的拖尾电流,使得在工作过程中容易产生开关损耗。相比传统的硬开关式焊接电源,软开关电源具有开关损耗小、开关频率高、工作稳定性强、可靠性高等优点[1]。在采用移相全桥软开关的控制策略时会存在类似于死区时间难调整等问题。有限双极性全桥软开关是软开关技术中发展比较成熟的,有限双极性软开关克服了移相全桥软开关技术中死区时间难以调整、占空比丢失以及在轻载条件下难以实现软开关等问题,但弧焊电源工况复杂,负载频繁在短路—负载—空载状态变换[2]。而有限双极性全桥软开关在空载时难以实现零电压开关[3],因此采用倍流整流电路以达到在全负载范围内实现功率器件零电压开关,提高电源可靠性[4-5]。高耐压的IGBT相比于低耐压IGBT具有较厚的PN结,开关损耗相对较高,ISOP组合器将电压均匀分配在两组全桥电路中的IGBT,降低IGBT上的电压应力[6],因此选取低耐压的IGBT可以进一步降低开关损耗,对两组电路进行交错控制,减小输出电流纹波[7]。
1 有限双极性软开关电路研究及工作过程分析
1.1 拓扑结构
ISOP组合变换器电路拓扑结构如图1所示。图中,Q11~Q14、Q21~Q24这8只开关管(并联续流二极管)组成两路全桥拓扑,Q11和Q13、Q21和Q23组成超前臂,Q12和Q14、Q22和Q24组成滞后臂。C11和C12、C21和C23为超前臂结电容和外接电容的等效电容,C12和C14、C22和C24为滞后臂结电容和外接电容的等效电容,Lr1和Lr2为饱和电感,Lk1和Lk2为变压器漏感。Lf11为滤波电感,Lf12和Lf22为辅助电感,DR11和DR12、DR21和DR22为快恢复二极管,C为输出滤波电容,R为焊接等效负载。

图1 ISOP主电路拓扑结构
ISOP组合变换器实现软开关的主要思想是超前臂和滞后臂实现ZVS。但实现的机理是不同的,超前臂实现零电压开关主要依靠环流过程中,输出滤波电感Lf和漏感Lk串联,原边类似于恒流源来实现。滞后臂实现零电压开关主要依靠饱和电感Lr[8]。为了在空载情况下提供能量,变压器副边采用并联辅助电感Lf1的方法。
1.2 电路工作过程分析
由于ISOP组合变换器是由两组完全相同的单元组成,以下将针对其中一个单元进行分析(见图2)。在分析过程中提出如下假设:1)图2中功率器件均为理想器件;2)同一桥臂并联电容容值相等,忽略误差。
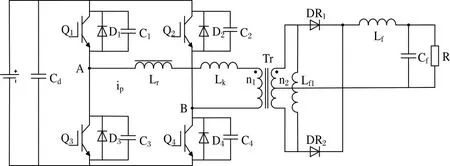
图2 有限双极性全桥拓扑结构
图3所示为功率器件的控制信号及主电路主要波形,Q1~Q4为功率管驱动波形图,VAB为变压器原边AB点间电压波形,ip为变压器原边电流波形,iLf1为流经辅助电感Lf1的电流波形。

图3 功率器件的控制信号及主电路主要波形
t0~t1时刻为功率传输模式,开关管Q1和开关管Q4同时导通,原边电流ip通过变压器副边绕组n2从同名端输出,流经二极管DR1、电感Lf、负载R,再回到变压器副边绕组n2中心抽头,将能量传递给负载,辅助电感Lf1经副边绕阻n2正端和负端构成充电回路。饱和电感Lr处于饱和状态,VAB等于电源电压,电感Lf充电。
t1时刻开关管Q1关断,电路中变压器漏感Lk和副边电感Lf与开关管并联的电容C1、C3产生谐振。ip流向开关管并联的电容C1、C3支路,开关管Q1并联的电容C1充电,开关管Q3并联的电容C3放电。由于Uc1不能突变,开始时为零,实现开关管Q1的零电压关断。饱和电感仍处于饱和状态,当Uc2降到零时,开关管Q3并联二极管D3续流。电流ip通过变压器副边绕组n2从同名端输出,流经二极管DR1、负载R和电感Lf再回到变压器副边绕组n2中心抽头,将能量传递给负载。t1时刻,ip通过开关管Q4和开关管Q3并联二极管D3续流,VAB电压降到0,电感Lf和原边是串联的,而且电感Lf电感量很大,原边电流近似不变。
t2时刻ip下降到零,饱和电感Lr退出饱和状态,呈现大阻抗,开关管Q4仍然导通但是没有电流流经。此时副边二极管DR1、二极管DR2均导通,电路处于续流状态,流经Lf1的电流保持不变。t3时刻开关管Q4在零电流的条件下自然关断,不对负载传输功率。副边二极管DR1、二极管DR2均导通,电路处于续流状态。
t4时刻开关管Q4关断,此时饱和电感处于退饱和状态,与开关管并联的电容C2、C4产生谐振。ip流向开关管并联的电容C2、C4支路中去,开关管Q4并联的电容C4充电,开关管Q2并联的电容C2放电。由于Uc4不能突变,开始时为零,实现开关管Q1的零电压关断。当Uc2降到零时,开关管Q2并联二极管D2续流。此时副边二极管DR1、二极管DR2均导通,电路处于续流状态,流经Lf1的电流保持不变。
2 有限双极性ZVZCS变换电路的PSpice仿真研究
2.1 仿真模型搭建
图4所示为有限双极性全桥ZVZCS的PSpice仿真模型。该仿真模型是按照功率为20 kW的焊接电源设计,最大输出电压为40 V,最大输出电流为300 A,频率为50 kHz。输入直流电压为540 V,是由380 V三相交流电整流后得到。该仿真模型中所有器件模型均按照实际器件的参数创建,模拟结果接近于实际测量,对后续的实际电路有良好的指导性价值。

图4 PSpice仿真模型
2.2 关键波形仿真结果
图5所示为在输出电压40 V、输出电流300 A情况下的变压器原边电流和电压波形,曲线2为原边AB点间电压波形,曲线1为原边电流波形。
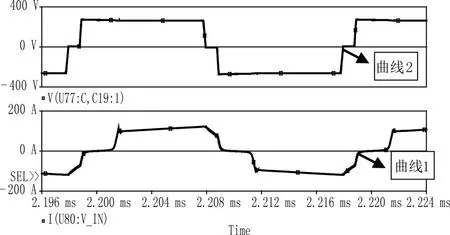
图5 原边电流和电压仿真波形
使用图4所示的仿真拓扑结构在整个负载范围内进行仿真,观察超前臂和滞后臂能否实现软开关。经仿真验证,该电路拓扑结构可在整个负载范围内实现软开关,其中2种极端情况(如空载、重载条件下)的仿真波形分别如图6和图7所示。

a)超前臂仿真结果

a)超前臂仿真结果
图6所示为空载条件下超前臂和滞后臂实现零电压开关的仿真波形。曲线1为开关管的脉冲驱动电压波形,其正向电压为15 V,反向电压为-15 V;曲线2为开关管CE间电压波形,输入直流电压为540 V左右。根据图6可以看出,超前臂和滞后臂在开通和关断时两端电压均为零,较好地实现了零电压的开关。
图7所示为重载条件下超前臂和滞后臂实现零电压的仿真波形。图7是在输出电压U=40 V、输出电流I=300 A时测得的超前臂和滞后臂零电压开关仿真波形图。曲线1为开关管的脉冲驱动电压波形,其正向电压为15 V,反向电压为-15 V;曲线2为开关管CE间电压波形。根据图7可以看出,超前臂和滞后臂在开通和关断时两端电压均为零,较好地实现了零电压的开关。
根据上述仿真结果可以看出,使用这种新型拓扑结构可以在全范围内实现软开关。
2.3 超前臂关断损耗仿真
超前臂的关断损耗主要由关断时原边电流值ip大小和其CE端电压UCE决定[9]。通过调整超前臂并联电容容值会影响超前臂关断时UCE的上升斜率,从而影响IGBT的关断损耗。应用PSpice仿真软件对不同超前臂电容进行参数仿真。图8a所示为在超前臂并联10 nF、20 nF、30 nF、40 nF电容和并联RCD缓冲网络(40 nF电容、10 Ω电阻)的情况下,超前臂IC和UCE的仿真波形。图8b所示为在这5种情况下IGBT关断损耗仿真结果。从图8中可以看出,就软开关而言,随着超前臂并联电容的增大,UCE的上升斜率减小,关断时UCE越小,所以关断损耗越小。且超前臂并联较大电容的开关损耗要低于硬开关条件下的RCD缓冲网络的开关损耗。但是随着电容增大,损耗降低的相对值越来越小。所以在实现超前臂ZVS的前提下,应尽可能选用较大的电容。

a)不同条件下超前臂IC和UCE仿真波形
软开关和硬开关同样并联40 nF的电容,软开关的损耗明显低于硬开关,这是因为在相同条件下软开关超前臂关断后,并联电容充电,电流为Ic1,同一桥臂并联电容放电,电流为Ic2,由于此时滤波电感折射到原边,短时间原边电流续流保持不变为Ip,所以Ic1+Ic2=Ip,又因为充放电的电流相同Ic1=Ic2,所以超前臂关断后并联电容充电的电流为Ip/2。而硬开关在开关管Q1、Q4同时关断后,原边电流Ip直接给RCD缓冲网络中的电容充电,所以充电电流为Ip。相同条件下,硬开关电容电压上升斜率大,开关损耗明显高于软开关。
3 焊接电源平台测试
3.1 均压均流测试
ISOP组合变换器是否均压是一个关键问题,如果均压效果不好,最恶劣的情况会造成ISOP一路烧毁。可通过无互联的共同占空比控制策略[10]、上翘控制策略[11]或者有互联的双闭环[12]、三闭环控制策略[13]实现均压均流控制。在空载情况下和带载情况下测得ISOP两路变压器原边电压波形均如图9所示。通过图9可以看出,ISOP组合变换器的均压效果良好,两路相差5 V以内,满足标准。本设计通过均压电阻以及两路的一致性来实现均压效果。

a)空载条件下
3.2 软开关实现情况测试
在空载和输出电流340 A、输出电压40.8 V条件下,检测ISOP组合变换器两路原边电流和辅助电感两端电流,波形分别如图10和图11所示。取样电阻为20 Ω,传感器型号为CHG-500E,比例为500∶1。根据测得波形可以计算原边峰值电流为12 A。在空载和带载情况下,两路原边电流基本一致,两路辅助电感两端电流也基本一致,均流效果良好。

a)空载条件下

a)空载条件下
经过实验测试ISOP组合变换器可以在整个负载范围内实现软开关,其中2种极端情况(如空载、重载条件下)的实测波形如图12和图13所示。可以看出,超前臂和滞后臂开通和关断时滞后臂并联电容电压降为零,较好地实现了滞后臂零电压开通。但是随着输出电流的增大,驱动波形UGE会产生较大的振荡,这是因为滞后臂虽然实现了零电压关断,但是在关断时原边电流还未衰减到零,处于大电流关断状态,开关管两端会产生较大损耗和开关噪声,这种开关噪声会影响驱动波形的质量。因此,虽然实现了滞后臂零电压开关,但是依旧有较大损耗。

a)超前臂ZVS

a)超前臂ZVS
3.3 温升实验测试
在空载和输出电流为340 A、输出电压为41 V条件下,对同一ISOP变换器软开关和硬开关进行温升实验,使用热敏电阻PT-100对IGBT贴敷的散热片进行温度测量。安装焊接电源外壳,在密闭的环境下让机器长时间运行,使用万用表记录初始时和最终温度稳定后的PT-100的阻值,换算成温度后计算最终温度和初始温度的差值即为温升。空载状态软硬开关的IGBT温升对比如图14所示,输出电流340 A、电压41 V条件下,软硬开关的IGBT温升对比如图15所示。可以看出在空载条件下,软开关IGBT的温升曲线明显高于硬开关,但在输出电流340 A、电压41 V条件下,软开关的温升曲线明显低于硬开关。

图14 空载条件下IGBT温升对比

图15 340 A、41 V条件下IGBT温升对比
在空载情况下硬开关励磁电流很小,所以开关损耗和导通损耗都非常小,但是软开关由于使用并联辅助电感的方案,励磁电流较大,增加了开关管导通损耗,所以软开关IGBT整体温升要高于硬开关。但在重载情况下,硬开关处于大电压电流下关断,关断损耗非常大,而软开关由于实现了超前臂和滞后臂的零电压开关,开关损耗较低,所以整体的温升曲线要低于硬开关。
4 结语
通过上述研究可以得出如下结论。
1)所研制的ISOP组合变换器可以在整个负载范围内实现超前臂和滞后臂的零电压开关,有效降低了焊接过程中的开关损耗,提高了电路可靠性,是一种比较理想的焊接电源拓扑结构。
2)通过PSpice仿真发现,在保证超前臂ZVS的前提下,超前臂并联电容越大,开关管CE端电压上升斜率越小,IGBT关断损耗越低。且超前臂并联较大电容的开关损耗要低于相同条件下的RCD缓冲网络的开关损耗。
3)温升对比实验证明,空载情况下硬开关励磁电流小,开关损耗较小;而软开关因并联辅助电感励磁电流较大,开关损耗较大。因此空载情况下软开关的温升高于硬开关的温升。重载情况下硬开关处于大电压电流状态关断,关断损耗较大;而软开关由于实现了零电压开关,开关损耗较小。因此,重载情况下软开关IGBT温升明显低于硬开关IGBT温升。