面向多播行协同作业的精量播种监测系统研究
2024-05-22彭芳伟李祥曾灵锋张晓建范勇吴正
彭芳伟 李祥 曾灵锋 张晓建 范勇 吴正
摘要:针对传统的气吸式播种机在作业过程中常常因导种管堵塞、种箱缺种以及机械故障造成的漏播、重播等现象,设计并开发一套支持12条播行协同作业的精量播种监测系统。该系统包括红外光电监测单元、车速监测单元、控制器单元、中控仪表单元以及故障报警单元的设计。试验结果表明,所设计的监测系统可以实时监控12条播种行的协同作业情况,当出现漏播、重播现象时能够及时、准确地识别播种行行号并进行故障报警,报警成功率达到100%,且平均响应时间在0.5 s以内。且在4~12 km/h的正常作业速度下,系统对不同体积大小的农作物种粒播种数量监测精度平均值超过98.5%。能够实现对多路播行同时作业的实时监测需求,对提高播种质量、降低生产成本具有重要意义。
关键词:播种监测;多播协同;红外光电传感器;霍尔传感器;气吸式播种机
中图分类号:S223.2+5
文献标识码:A
文章编号:20955553 (2024) 02003308
收稿日期:2023年5月17日 修回日期:2023年8月18日
基金项目:江西省网络空间安全重点实验室开放基金项目(JKLCIP202205)
第一作者:彭芳伟,男,1999年生,江西萍乡人,硕士研究生;研究方向为自动驾驶。Email: Shepherd_p@163.com
通讯作者:李祥,男,1973年生,江西萍乡人,博士,教授;研究方向为大数据分析与图像处理。Email: tom_lx@126.com
Research on precision seeding monitoring system for cooperative operation of multicast lines
Peng Fangwei1, Li Xiang1, 2, Zeng Lingfeng1, Zhang Xiaojian1, Fan Yong3, Wu Zheng3
(1. East China University of Technology, Nanchang, 330013, China; 2. Jiangxi Key Laboratory of Intelligent
Perception for Cyberspace Security, Nanchang, 330013, China; 3. Geely Automobile Research Institute,
Ningbo, 315336, China)
Abstract:
In order to address issues such as missseeding and reseeding caused by guide tube clogging, seed box shortages and mechanical failures in the operation of traditional pneumatic seeder, a precision seeding monitoring system was designed and developed to support the cooperative operation of 12 seeding lines. The system comprises of an infrared photoelectric monitoring unit, speed monitoring unit, controller unit, central control instrument unit, and fault alarm unit. Experimental results demonstrate that the designed monitoring system efficiently provides realtime monitoring of the cooperative operation of the 12 seeding lines. It can accurately identify the seeding line number and promptly raise a fault alarm in case of missseeding or reseeding events. The alarm success rate reaches 100%, with an average response time of less than 0.5 s. Under normal operating speeds of 4 to 12 km/h, the system achieves an average accuracy of over 98.5% in monitoring the seeding number for crops of different sizes. This holds significant value in improving seeding quality and reducing production costs.
Keywords:
seeding monitoring; multicast collaboration; infrared photoelectric sensor; hall sensor; pneumatic seeder
0 引言
播種作为农业生产的重要环节,播种质量的优劣对农作物产量有着直接影响。传统的气吸式播种机[1]在作业过程中常常因为导种管堵塞、种箱缺种、机械故障等问题造成漏播、重播,若不能及时发现,可能导致大面积漏播或重播现象的发生,进而影响农作物产量。随着农机智能化的快速发展,精量播种监测技术已经成为当前农机智能化的主流研究方向。实现对播种机排种作业的精确监测,有助于提高播种质量,降低生产成本。
目前,精量播种监测的技术方式[29]主要包括电容式、高速摄像、压电式、机器视觉、光电式等。赵郑斌等[6]利用机器视觉算法进行图像分析与处理,来识别穴盘的播种情况。周利明等[10]利用电容量随电容极板相对介质变化而改变的原理,实现对排种量的监测。Kumar等[11]设计了一种配备红外传感器和嵌入式系统的监测装置,用于监测种子流的信息。结果表明,在不同转速下(转速为40~80 r/min),所研制的系统能较好地检测出导种管内的种子流量。AlMallahi等[12]开发了一种使用光纤传感器监测小种子的质量流模型。转速较低时,模型拟合良好,误差较小。转速越高,误差越大,总体估计误差为5.3%。上述相关研究都是对种子流量的监测,这是一个估计值,而不是一个准确的量。
国内外学者对单株播种的精准监测进行了研究。丁幼春等[13]设计的油菜播种监测系统通过内嵌的北斗定位单元获取农机位置信息,并采用4G无线通信技术将播种作业信息和定位信息实时传输至云服务器,实现农机作业信息的远程监控。Borja等[14]设计具有机器视觉和机电一体化技术的控制系统,能够精确地监测播种情况。张永超等[15]设计基于线阵Complementary MetalOxideSemiconductor(CMOS)的播种监测系统,利用高频线阵CMOS图像传感器检测种粒下落情况。
此外,对播种故障的监测也非常重要,如导种管堵塞、种箱缺种等。Raheman团队指出,如果播种机没有配备监测设备,驾驶员在播种过程中无法观察到播种情况,播种机所经过的耕地的播种情况是未知的。Cuhac等[16]指出,造成种沟内缺籽的两个主要原因包括排种器未排出种子或种子被堵在导种管中未落入种沟。Kumar等[17]設计并开发了一种用于监测种管种子信息的嵌入式系统,装有蜂鸣器和发光二极管,通过声音和视觉信号提醒司机种子是否落入种子沟。
针对目前多播行协同作业监测方面存在的问题,本研究以精密气吸式排种器的播种参数监测为研究对象,利用红外光电传感器和霍尔传感器获取播种参数,设计了一套面向多播行协同作业的精量播种监测系统。实现快速、准确、实时的播种质量监测,进一步提高了农机作业的智能化水平。
1 系统结构及工作原理
1.1 系统结构
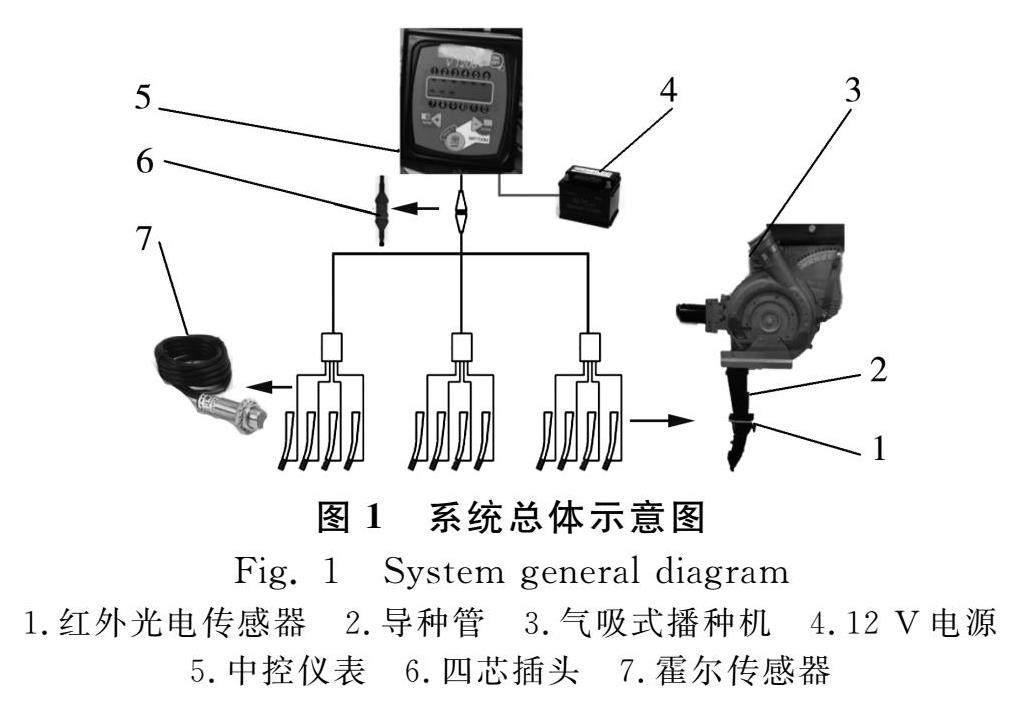
本文所设计的精量播种监测系统(图1),具体包括红外光电监测单元的设计、车速监测单元的设计、控制器单元的设计、中控仪表单元的设计以及故障报警单元的设计。以四行播种单体为一组,可以根据单行播种数量的增加而任意扩展,能够实时监测各个播种单体的作业情况。
1.2 工作原理
1.2.1 精密气吸式排种器工作原理
排种器在工作时,先启动播种风机,在管路中产生气吸负压后,播种控制器驱动播种盘旋转,进行充种。同时,系统根据霍尔传感器测得的速度参数来计算实时车速,在到达预定土壤位置时,播种控制器进一步根据用户设定的播种参数精准的驱动排种器落种,完成一次排种。
1.2.2 精量播种监测系统工作原理
精量播种监测系统结构图如图2所示。
本系统在导种管内安装红外光电传感器,实时监测种子的通过情况。当种子经过时,传感器产生高低电压变化,产生脉冲信号。控制器的IO(Input/Output)引脚与传感器信号线相连,实时捕获脉冲信号,并通过相应的处理计算得到排种的时间间隔、频率和总数等参数。同时,利用霍尔传感器实时获取播种机的前进速度,为播种参数的计算提供速度参数。控制器采集到相关参数后计算得到实际播种粒距、播种面积,并根据用户设定的理论粒距计算得到漏播率和重播率等播种参数。通信线分别与控制器和显示终端相连,按照设计的协议进行数据传输,最后将监控信息实时显示在中控仪表上。当系统监测到某个播种行发生漏播或重播现象时,声光报警器将发出报警信号,同时,中控仪表上会显示故障所在的播种行行号信息,及时提醒驾驶员。系统采用独立电源供电,与拖拉机和播种机完全分离,目的是避免相互干扰,便于安装和拆卸。
2 精量播种监测系统设计
精量播种监测系统由中控仪表人机交互系统单元、控制器单元、车速监测单元和红外光电传感器监测单元组成。
2.1 红外光电监测单元设计
本文针对不同粒径大小的农作物播种监测需求,设计了一种基于红外对射式传感器的落种监测模块。该模块的发射端采用3个红外发射管发射红外信号,接收端采用3个光敏二极管接收红外信号,由此形成的红外光线通路可以覆盖整个导种管的横截面,实现无盲区监测。此外,采用调制管对红外发射管的发射频率进行调制,可提高系统的抗粉尘干扰能力,并实现对不同粒径大小的农作物播种监测。红外光电传感器实体如图3所示。
1.接收端 2.支架 3.发射端
正常作业过程中,当种粒通过监测单元时会遮蔽红外光线通路,此时光敏二极管接收到的光源信号发生改变,当信号强度低于设定的阈值时,检测电路会形成脉冲信号,并传输至控制器端。红外光电监测单元模型如图4所示。
2.2 车速监测单元设计
本文的车速监测单元采用NJK-5002C型直流三线NPN(NegativePositiveNegative)常开型霍尔接近开关作为车速检测传感器[1819]。将传感器安装在车轮电机盖上,感应块固定在夹片上,再用两颗螺丝将夹片固定在转轴上,作为测量点,并调整贴片与转轴间距为2~3 mm。车速检测单元模型如图5所示。
根据霍尔效应原理,当铁片接近霍尔接近开关时,霍尔接近开关会产生脉冲信号并传输至控制器,控制器通过计算ΔT时间内接收到的脉冲信号个数,得到脉冲频率。车轮电机转速经过霍尔接近开关捕获,再经过异点剔除、脉冲滤波等算法形成轮速脉冲信号,控制器进一步对脉冲信号进行采集并分析,来达到车速监测的目的[2021]。
轮速计算原理公式如式(1)所示。
v=2×π×R×uK×f=2×π×R×u×QK×ΔT
(1)
式中:
R——车轮半径,m;
u——地轮滑移率;
f——轮速脉冲频率,Hz;
K——齿圈的齿数比;
v——车速,m/s;
Q——ΔT时间内轮速脉冲个数。
脉冲频率的计算是通过单片机的脉冲输入捕捉、记录脉冲发生时刻和发生个数完成的。通常周期越大,累计捕获的脉冲个数越多,计算误差越小,但同时实时性会越差。播种机主要侧重于低速区更新频率,可取较低数值如500 ms更新周期。
当显示车速和实际车速不符时,监测系统需要調整参数C的数值。C表示每行驶100 m车速传感器发出的脉冲数,控制器将通过参数C来计算已作业面积数。表1是通过对不同型号播种机测试得出的常用C值参考。
例如:变速器齿数B为16、轮边齿数A为23、轮胎规格为7.50-16,则C为58。当检测到的车速和实际车速相符时,参数C才是正确的设定。为更精确地计算播种面积,还可通过自动校准程序设置参数C,其原理是使播种机行驶100 m的距离后停下,脉冲数记为C。
2.3 控制器单元设计
控制器是信号采集和参数计算的中心,本系统的控制器单元创建了两个主芯片(AT89S52-24U-TW和STC15F2K60S2-28I LQFP44)。其中,STC15F2K60S2-28I LQFP44为主控制芯片,主要作用是将作业信息(工作面积、播种数量等指数)通过CAN(Controller Area Network)报文上传至后台,并对每一次的作业信息进行存储。P3.7/INT3/TxD_2/CCP2/CCP2_2管脚具有写保护功能,当该引脚为高电平时,禁止写入数据,当引脚为低电平时,允许写入数据。CANINTE(Controller Area Network Interrupt Enable Register)寄存器包含了使能各中断源的中断使能位。信号1~信号6用于配置CAN控制器。CANINTF(Controller Area Network Interrupt Flag Register)寄存器包含了各中断源的中断标志位。当发生中断时,INT引脚被拉为低电平,并保持低电平状态直至中断清除。中断只有在引起相应的中断条件消失后,才会被清除[22]。
AT89S52-24U-TW是CMOS 8位微控制器。其中,(INT0)P3.2管脚用于接收车身的转速信号,没有信号时是低电平,有信号时是高电平;(T0)P3.4管脚用于对PWM(Pulse Width Modulation)波的检测,如测试车速恒定时,走100 m有多少个PWM波。
通信协议采用CAN通信网络,参照ISO 11783进行协议设计,利于系统针对多播行协同作业监测单体的扩展;信号线主要包括红外光电传感器信号线、车速传感器信号线以及中控仪表信号线,信号由控制器进行集中解算。
2.4 播种参数计算程序设计
播种量、漏播率以及重播率等参数可根据GB/T 6973—2005《单粒(精密)播种机试验方法》[31]进行计算。实际播种粒距大于1.5倍理论粒距时判定为漏播,实际播种粒距小于或等于0.5倍理论粒距时判定为重播,其余为合格粒距。
2.4.1 播种参数计算方法
播种器启动计算的条件是当轮速脉冲变化并且检测到任意一个播种行落种时,控制器开始启动作业参数的计算。
1) 播种作业面积的计算方法。根据设定的行驶速度与单位行驶时间可计算播种作业面积。
行驶距离=行驶速度×行驶时间
播种作业面积=行数×行宽×行驶距离
2) 理论播种量的计算方法。理论播种数量就是在行驶距离内应播种数量。
理论播种数量=行驶距离/理论粒距
3) 实际播种数量的计算方法。通过累计红外光电传感器产生的脉冲信号计数可获取当前实际播种数量。
4) 实际粒距的计算方法。根据行驶时间内的实际播种数量和行驶距离可计算播种作物的实际粒距。
实际粒距=行驶距离/实际播种数量
2.4.2 相关指数计算方法
按照GB/T 6973—2005《单粒(精密)播种机试验方法》[31],计算合格率、重播率、漏播率,每250粒种子为一组。
P=n0N×100%
(2)
D=n1N×100%
(3)
M=n2N×100%
(4)
式中:
n0——合格播种数量;
n1——重播数量;
n2——漏播数量;
N——实际播种数量;
P——合格率;
D——重播率;
M——漏播率。
2.5 中控仪表单元设计
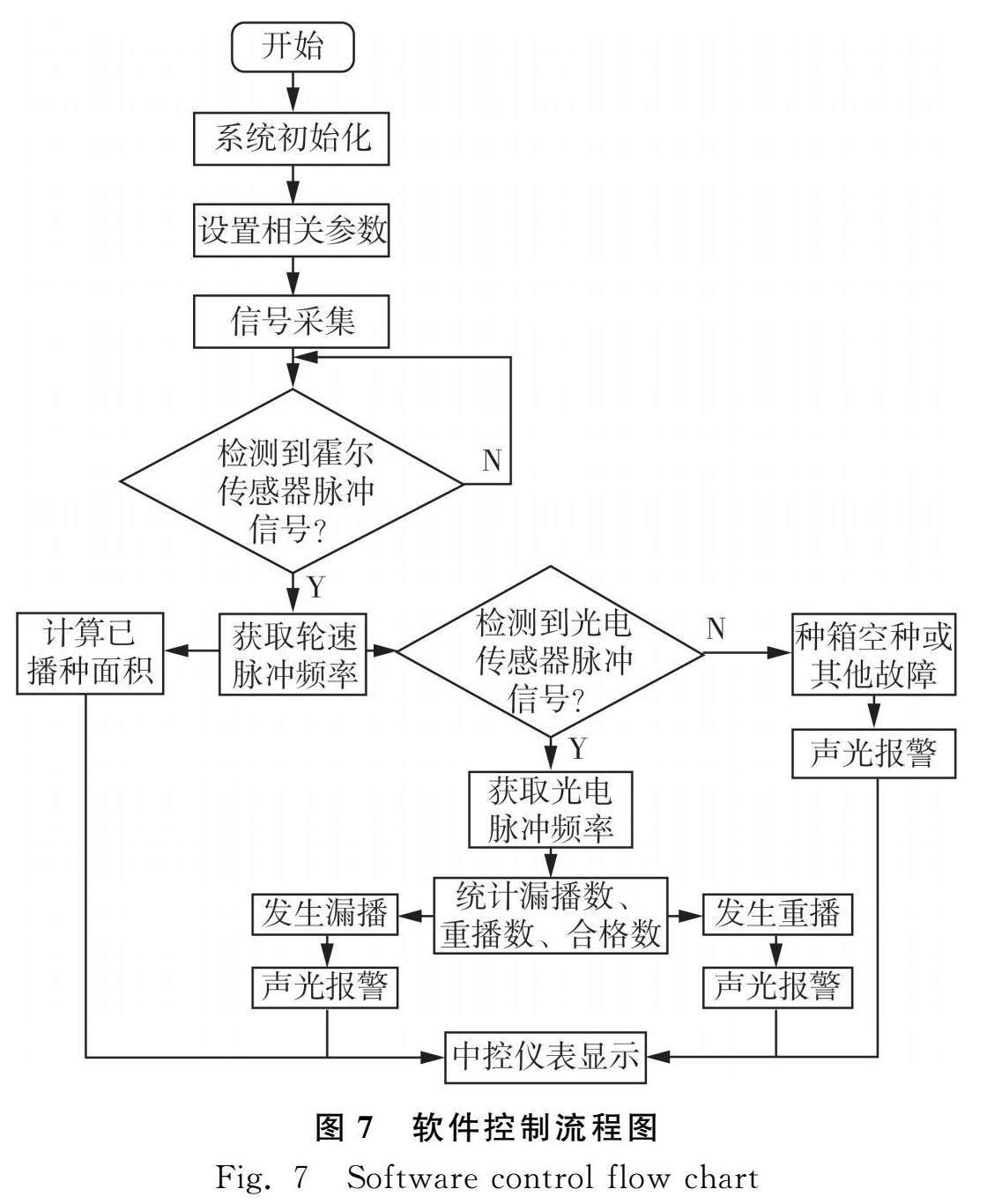
系统上电后进入开机模式,中控仪表的所有部件亮灯并且声音信号(嗡嗡声)响起。开机后中控仪表显示已作业时间,通过加减按钮分别显示总播种面积和部分播种面积。长按“width”按键进入设置模式,设置作业宽度,可以实现同时对最多12条播行的信号接收,作业宽度是计算总面积和部分面积的重要参数。此外,还可以设置参数C和光电监测灵敏度,实现对玉米、大豆、棉花和小麦等不同体积大小的常见农作物种粒的排种监测。各值设置之后,连接传感器,当没有信号或只有一个信号值时,屏幕会显示信号所在位置,同时声光报警器会报警。当有一个以上信号值时,屏幕会显示信号所在位置并进入工作模式。作业开始时,红外光电元件向控制器发出脉冲信号,开始当前行的存储阶段:在此阶段大约持续4 s,与确认并存储的行对应的部件将在显示屏上亮起。每次进入设置模式时,控制器仅运行行存储步骤一次,并且在此阶段没有保存的播行数保持在此数值下,直到控制器关闭。软件控制流程图如图6所示。
2.6 故障报警单元设计
软件控制流程如图7所示。
故障报警是精量播种监控系统中非常重要的功能,特别是在大型农场的播种工作过程中,故障报警功能是非常必要的。对此,本文设计了针对漏播、重播现象的报警功能。当某个播种行的播种粒距超过设定的范围时,中控仪表上对应行的黑色方块会闪烁,同时蜂鸣器会发出报警声音,及时提醒驾驶员去检查对应播种行的播种器故障;同样,当某个播种行的播种粒距小于设定的范围时,此时中控仪表和蜂鸣器会发出报警。
3 精量播种监测系统性能试验
为验证面向多播行协同作业的精量播种监测系统的性能,本团队进行了台架模拟试验和田间播种试验。主要包括模拟车速监测精度试验、模拟多播行协同作业的监测性能试验、故障报警可靠性试验以及针对播种参数实时监测的田间播种试验。
3.1 模拟车速监测精度试验和模拟多播行协同作业的监测性能试验
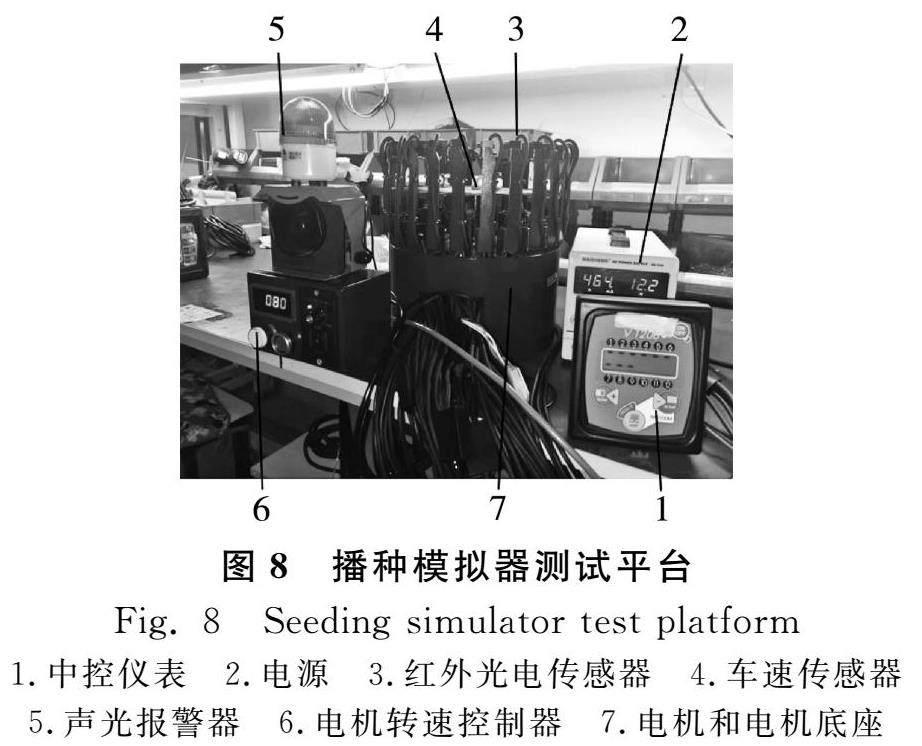
为验证精量播种监测系统在多行协同作业过程中的系统可靠性,设计以播种模拟器为核心,多个辅助辅助模块协同作业的模拟多播行播种作业测试平台。播种模拟器的设计思想是采用可控电机模拟轮机转动,并将24个红外光电传感器等距分布安装在圆形底座上,以及一块同样等距分布有24根细铁杆的转盘固定在电机旋转轴上,可模拟最多24路播行的播种作业情况。同时,将2个霍尔传感器安装在电机底座上,并在转盘上穿孔固定两个螺丝充当感应块,分别用于模拟拖拉机的电机转速监测和播种模拟器的电机转速监测。由于本文设计的是面向12个播行协同作业的精量播种监测系统,因此,试验过程中只需接通12个红外光电传感器的电源和信号线,并根据上文提到的C值参考表,选择变速器齿数B为23、轮边齿数A为23、轮胎规格为6.5/80-15,并设置C值为45,通过调节播种模拟器的电机转速模拟拖拉机的车速。在电机转速为20 r/min、30 r/min、40 r/min、50 r/min、60 r/min时的情况下分别进行试验,记录下监测系统显示的实时车速。通过以上试验成功模拟了12条播行协同作业过程,并有效监测到了各个播种参数。播种模拟器测试平台如图8所示。
3.2 故障报警可靠性试验
为验证精量播种监测系统的故障报警功能的可靠性,本团队采用可控播种风机,搭建了以精密气吸式排种器为核心的台架测试平台。测试平台如图9所示。
故障报警可靠性试验主要是模拟播种机在作业过程中最常发生的种箱缺种和导种管堵塞这两个故障,以验证精量播种监测系统的故障报警功能的可靠性。首先,通过控制播种风机的启停按钮来控制气吸式排种器的工作,人为造成漏播现象,模拟出排种器缺种故障。其次,在播种过程中通过人为堵塞导种管,使种粒无法下落,造成漏播现象,模拟出导种管堵塞故障。在试验过程中,小组成员通过协调配合,人为制造播种故障,同时观察播种故障发生时监测系统是否正确发出报警,并记录系统的响应时间,得到系统的响应速度。两种方法分别进行了100次重复试验。
3.3 田间播种试验
为验证所设计的精量播种监测系统的在真实播种作业工况下的監测性能,进行了田间播种试验。采用十二行精密气吸式播种机进行播种作业试验,粒距为0.3 m,播种距离为75 m。并针对4.0 km/h、6.0 km/h、8.0 km/h、10.0 km/h、12.0 km/h等5种不同作业速度,各重复试验了5次,测试结果取平均值。试验安排符合中国国家标准GBT 6973—2005《单粒(精密)播种机试验方法》[23]。试验场景如图10所示。
4 试验结果分析
通过台架模拟试验和田间播种试验,对系统性能进行了全面、准确地验证。
4.1 模拟车速监测精度试验和模拟多播行协同作业的监测性能试验结果分析
在电机转速分别为20 r/min、30 r/min、40 r/min、50 r/min、60 r/min时的分别进行了车速检测测试,并根据上文提到的轮机转速公式,在不考虑地轮滑移率的情况下,分别计算得到5种电机转速下的实际车速,并与记录的监测系统显示的实时检测车速对比。如表2所示,实际车速与系统监测车速完全一致,无差异,验证了本研究设计的监测系统的测速功能的准确性。
在模拟多播行协同作业监测性能的试验过程中,当参数C正确设定后,系统能够准确监测到各行的播种信息,并在屏幕中内用黑色方块显示播种状态,每一列黑色方块表示一条播种行。当各行实际粒距等于理论粒距时,屏幕中各黑色方块处于常亮状态。试验过程中通过调节播种模拟器电机转速的高低,成功模拟了漏播和重播现象,使第7、8、10、11、12条播种行的百分比误差超过设定的范围,这时显示器中对应的黑色方块闪烁,测试界面如图11所示。通过上述试验成功模拟了12条播行协同作业的情景,验证了多播行协同作业的报警功能的准确性与可靠性。
4.2 故障报警可靠性试验结果分析
通过故障报警可靠性试验,成功模拟了由于种箱缺种和导种管堵塞两种故障所造成的漏播现象,同时记录下了从故障发生到系统报警的时间间隔,假设人工计时的响应时间可以忽略不计。试验结果表明,系统对两种故障监测的准确率和报警成功率均为100%,没有发生漏报警事故。成功验证了精量播种监测系统的故障报警功能的可靠性。图12为系统故障报警响应时间的散点图。从图12可以看出,系统的响应时间范围相对稳定,误差平均值小于0.5 s。系统的故障报警响应时间很快,能够准确、及时地报警,满足实际工作要求。
4.3 田间播种试验结果分析
针对玉米、大豆、棉花和小麦等4种不同体积大小的常见农作物种粒,在粒距为0.3 m,播种长度为75 m的播种参数下,可计算得到每次试验的理论播种数量为250粒。此外,考虑到作业速度的快慢是否会对监测精度产生影响,分别在4.0 km/h、6.0 km/h、8.0 km/h、10.0 km/h、12.0 km/h的播种速度下进行了播种试验,并对实际播种数量进行人工统计,统计结果平均值如图13所示。从图13可以得出,不同体积大小的农作物播种监测的合格率、漏播率和重播率平均监测精度分别超过96.5%、97.4%和98.8%,误差较小,并且在常用作业速度范围内的播种监测精度相差未超过0.5%,没有较大波动,证明系统的监测性能能够满足实际作业要求,具有较高可靠性。
5 结论
本研究设计并开发了一种面向多播行协同作业的精量播种监测系统。该系统采用红外光电传感器和车速传感器作为信号捕获源,实现了对播种面积、漏播率、重播率和合格率等播种参数的有效监测。同时在播种故障发生时能够及时报警,避免因漏播或重播现象而造成损失。
1) 为方便开发过程中需对软硬件协调一致性进行检验,设计了支持12条播行协同作业监测的播种模拟器。有效解决了试验场地限制以及能耗成本等问题,提升了开发测试过程中的便捷性。验证了车速监测功能的精确性和多播行协同作业监测性能的可靠性。
2) 监测系统的故障报警平均响应时间小于0.5 s,报警成功率达到100%。系统的故障报警响应时间很快,能够准确、及时地报警,满足实际工作要求。
3) 田间试验测试结果表明,系统在4~12 km/h的播种作业速度下,对不同体积大小的农作物种粒播种数量监测精度平均值超过98.5%,合格率、漏播率、重播率监测精度分别达到96.5%、97.4%和98.8%以上。针对不同体积大小的农作物种粒,监测系统的监测精度相对稳定,且播种速度对监测精度影响不大,能够满足精量播种作业的监测需求。
参 考 文 献
[1]吕泰红. 气力式播种机的基本原理与失效形式分析[J]. 农机使用与维修, 2023(2): 74-76.
Lü Taihong. Analysis of the basic principle and failure form of pneumatic seeder [J]. Agricultural Machinery Using & Maintenance, 2023(2): 74-76.
[2]陈进, 边疆, 李耀明, 等. 基于高速摄像系统的精密排种器性能检测试验[J]. 农业工程学报, 2009, 25(9): 90-95.
Chen Jin, Bian Jiang, Li Yaoming, et al. Performance detection experiment of precision seed metering device based on highspeed camera system [J]. Transactions of the Chinese Society of Agricultural Engineering, 2009, 25(9): 90-95.
[3]孙国峻, 张金然, 徐勇, 等. 基于PVDF双压电薄膜的油菜播种监测系统的设计与试验[J]. 湖南农业大学学报(自然科学版), 2022, 48(5): 601-607.
Sun Guojun, Zhang Jinran, Xu Yong, et al. Design and experiment of rapeseed sowing monitoring system based on PVDF bipiezoelectric film [J]. Journal of Hunan Agricultural University (Natural Sciences), 2022, 48(5): 601-607.
[4]趙郑斌, 刘昱程, 刘忠军, 等. 基于机器视觉的穴盘精密播种性能检测系统[J]. 农业机械学报, 2014, 45(S1): 24-28.
Zhao Zhengbin, Liu Yucheng, Liu Zhongjun, et al. Performance detection system of tray precision seeder based on machine vision [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(S1): 24-28.
[5]Marrion C C, Foster N J, Lifeng L I U, et al. System and method for threedimensional alignment of objects using machine vision [P]. U.S. Patent: 8,442, 304, 2013-5-14.
[6]谢竹青, 胡建平. 磁吸式精密播种器性能图像检测技术研究[J]. 计算机应用与软件, 2009, 26(2): 177-178, 213.
Xie Zhuqing, Hu Jianping. Study on image detection technology for performance of magnetic type precision seeder [J]. Computer Applications and Software, 2009, 26(2): 177-178, 213.
[7]Lan Y, Kocher M F, Smith J A. Optoelectronic sensor system for laboratory measurement of planter seed spacing with small seeds [J]. Journal of Agricultural Engineering Research, 1999, 72(2): 119-127.
[8]解春季, 杨丽, 张东兴, 等. 基于激光传感器的播种参数监测方法[J]. 农业工程学报, 2021, 37(3): 140-146.
Xie Chunji, Yang Li, Zhang Dongxing, et al. Seeding parameter monitoring method based on laser sensors [J]. Transactions of the Chinese Society of Agricultural Engineering, 201, 37(3): 140-146.
[9]张景, 纪超, 陈金成, 等. 精量播种机排种质量电子监测技术研究现状[J]. 新疆农机化, 2018(2): 15-19.
Zhang Jing, Ji Chao, Chen Jincheng, et al. Research status of electrical seeding quality monitoring technology for precision seeder [J]. Xinjiang Agricultural Mechanization, 2018(2): 15-19.
[10]周利明, 王书茂, 张小超, 等. 基于电容信号的玉米播种机排种性能监测系统[J]. 农业工程学报, 2012, 28(13): 16-21.
Zhou Liming, Wang Shumao, Zhang Xiaochao, et al. Seed monitoring system for corn planter based on capacitance signal [J]. Transactions of the Chinese Society of Agricultural Engineering, 2012, 28(13): 16-21.
[11]Kumar R, Raheman H. An embedded system for detecting seed flow in the delivery tube of a seed drill [C]. Proceedings of International Conference on Advances in Chemical, Biological & Environmental Engineering (ACBEE). 2015: 236-241.
[12]AlMallahi A A, Kataoka T. Estimation of mass flow of seeds using fibre sensor and multiple linear regression modelling [J]. Computers & Electronics in Agriculture, 2013, 99: 116-122.
[13]丁幼春, 陈礼源, 王登辉, 等. 油菜播种质量监测系统设计与试验[J]. 华南农业大学学报, 2021, 42(6): 43-51.
Ding Youchun, Chen Liyuan, Wang Denghui, et al. Design and test of monitoring system for rapeseed sowing quality [J]. Journal of South China Agricultural University, 2019, 42(6): 43-51.
[14]Borja A A, Amongo R M C, Suministrado D C, et al. A machine vision assisted mechatronic seed meter for precision planting of corn [C]. 2018 3rd International Conference on Control and Robotics Engineering (ICCRE). IEEE, 2018: 183-187.
[15]張永超, 赵录怀, 艾雄雄. 基于线阵CMOS的播种量检测系统设计[J]. 国外电子测量技术, 2019, 38(12): 50-55.
Zhang Yongchao, Zhao Luhuai, Ai Xiongxiong. Design of seeding quantity detection system based on linear array CMOS [J]. Foreign Electronic Measurement Technology, 2019, 38(12): 50-55.
[16]Cuhac C, Virrankoski R, Hninen P, et al. Seed flow monitoring in wireless sensor networks [C]. 2nd Workshop on Wireless Sensor Systems (WoWSS2012). 2012.
[17]Kumar R, Raheman H. Detection of flow of seeds in the seed delivery tube and choking of boot of a seed drill [J]. Computers and Electronics in Agriculture, 2018, 153: 266-277.
[18]卢伟业, 魏榕山, 蔡魏威. 三维霍尔开关型传感器[J]. 传感器与微系统, 2023, 42(1): 83-86.
Lu Weiye, Wei Rongshan, Cai Weiwei. Threedimensional hall switch sensor [J]. Transducer and Microsystem Technologies, 2023, 42(1): 83-86.
[19]陈荡, 陈杰, 连晟, 等. 霍尔接近开关金属探测器系统设计[J]. 河南科技大学学报(自然科学版), 2014, 35(5): 46-49, 110.
Chen Dang, Chen Jie, Lian Sheng, et al. Design of metal detector system based on hall proximity switch [J]. Journal of Henan University of Science and Technology (Natural Science), 2014, 35(5): 46-49, 110.
[20]孟志军, 刘卉, 付卫强, 等. 农田作业机械测速方法试验[J]. 农业工程学报, 2010, 26(6): 141-145.
Meng Zhijun, Liu Hui, Fu Weiqiang, et al. Evaluation of ground speed measurements for agricultural machinery [J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(6): 141-145.
[21]陈育中. 霍尔传感器测速系统的设计[J]. 科学技术与工程, 2010, 10(30): 7529-7532.
Chen Yuzhong. Design of the velocitymeasuring system of hall sensor [J]. Science Technology and Engineering, 2010, 10(30): 7529-7532.
[22]GB/T 41588.2—2022, 道路车辆控制器局域网(CAN) 第2部分: 高速媒介访问单元[S].
[23]GB/T 6973—2005, 单粒(精密)播种机试验方法[S].
