小麦机械化匀播控制系统设计与试验
2024-05-22孙小雯奚小波陈猛黄盛杰金亦富张瑞宏
孙小雯 奚小波 陈猛 黄盛杰 金亦富 张瑞宏
摘要:针对播种作业均匀性差的问题,设计基于STM32单片机的小麦机械化匀播控制系统,通过轮式机器人变速作业,并依据轮式行驶机器人实时行驶速度,控制排种电机转速,实现变速匀播。采用多级控制直流电机转速,一级控制参数为轮式行驶机器人实时行驶速度信号,采用PID控制;二级控制参数为排种器电机实时电流和转速,采用模糊PID控制。控制算法仿真结果表明,该控制算法响应时间短,超调量小,控制效果良好。播种试验结果表明,轮式行驶机器人恒速状态下的播量控制精度达96.8%,变速状态下的播量控制精度达95.1%。
关键词:播种机;均匀播种;播量控制;多级控制;电机控制
中图分类号:S223.2
文献标识码:A
文章编号:20955553 (2024) 02002706
收稿日期:2023年8月31日 修回日期:2023年11月22日
基金项目:江苏省科技项目(BE2022338);江苏省现代农机装备与技术示范推广项目(NJ2021—16);江苏省农业自主创新资金项目(CX(22)1001);扬州大学“高端人才支持计划”
第一作者:孙小雯,女,1998年生,甘肃庆阳人,硕士研究生;研究方向为农业工程与信息技术。Email: sxw1202@foxmail.com
通讯作者:奚小波,男,1989年生,江苏盐城人,博士,副教授;研究方向为农业工程与装备。Email: xxbctg@126.com
Design and experiment of control system of wheat mechanized uniform sowing
Sun Xiaowen1, Xi Xiaobo1, Chen Meng2, Huang Shengjie3, Jin Yifu1, Zhang Ruihong1, 4
(1. School of Mechanical Engineering/Jiangsu Engineering Center for Modern Agricultural Machinery and Agronomy
Technology, Yangzhou University, Yangzhou, 225127, China; 2. Ningbo Fotile Kitchen Ware Company, Ningbo,
315336, China; 3. Jiangsu Agricultural Machinery Testing and Appraisal Station, Nanjing, 210017, China;
4. Nanjing Woyang Machinery Technology Co., Ltd., Nanjing, 211200, China)
Abstract:
In order to solve the problem of poor uniformity of sowing operation, a wheat mechanized sowing control system based on STM32 single chip microcomputer is designed. The wheeled driving robot could travel with variable speed. According to the realtime driving speed of the wheeled driving robot, the speed of the seeding motor is controlled to realize the variable speed and uniform seeding. The system used multistage control of DC motor speed. The realtime speed signal of the wheeled driving robot is used for The firststage control parameter, which is controlled by PID. The realtime current and speed of the seeder motor are used for secondary control parameters, which is controlled by fuzzy PID. Simulation results show that the control algorithm has short response time, small overshoot and good control effect. The results of sowing experiment have shown that the control accuracy of seeding amount under constant speed condition is 96.8% and that under variable speed condition is 95.1%.
Keywords:
seeder; evenly sowing; seeding rate control; multistage control; motor control
0 引言
小麥是中国最重要的口粮之一,小麦产业发展直接关系到国家粮食安全和社会稳定,播种作为小麦生产的最初环节,其作业质量好坏直接影响着小麦的生长发育和最终产量[1]。适宜的播种密度是保证小麦高产的重要因素之一,调整播种密度可有效协调小麦单位面积穗数与穗粒数的关系,进而提高产量[23]。小麦机械化播种可以提高小麦生产作业质量,然而传统小麦播种机械主要以地轮式驱动为主,其大多存在播种不匀的问题,且农机作业工况复杂,拖拉机往往不能恒速行驶,会导致播种均匀性变差。近年来随着智能农机的快速发展,对小麦播种质量的要求更高,排种器均匀播种控制成为关键[4]。
国外发达国家在排种器控制方面展开研究较早。Inoti等[5]设计了一种针对气力精量播种的控制系统,它包含了数据采集、数据处理、播种控制等功能;法国某公司研制了NG Plus系列气吸式精播机,该精播机通过在尾部的传动装置进行播种行距、播量调节[6];Leemans等[7]设计了一种通过机器视觉监测播种过程并引导播种机进行精密播种作业的控制系统。在国内,娄秀华[8]研究设计步进电机带排种轴旋转的一种播种控制系统;唐尧华[9]采取霍尔测速元件作为排种轴转速控制信号测取源,通过控制步进电机转动来驱动排种轴;冯玉岗等[10]研制出基于卫星测速小麦精量电驱式播种控制系统。上述研究主要集中在播量调节、播种检测、精量控制方面,未涉及排种器均匀播种控制方面研究[1112]。
本文设计小麦机械化匀播控制系统,选用STM32系列单片机,优化控制算法,将整个控制系统搭载在轮式行驶机器人上,依据轮式行驶机器人实时传输的速度信号,控制排种电机达到最佳目标转速,从而实现均匀播种,并通过场地试验验证小麦机械化匀播控制系统设计的可行性。
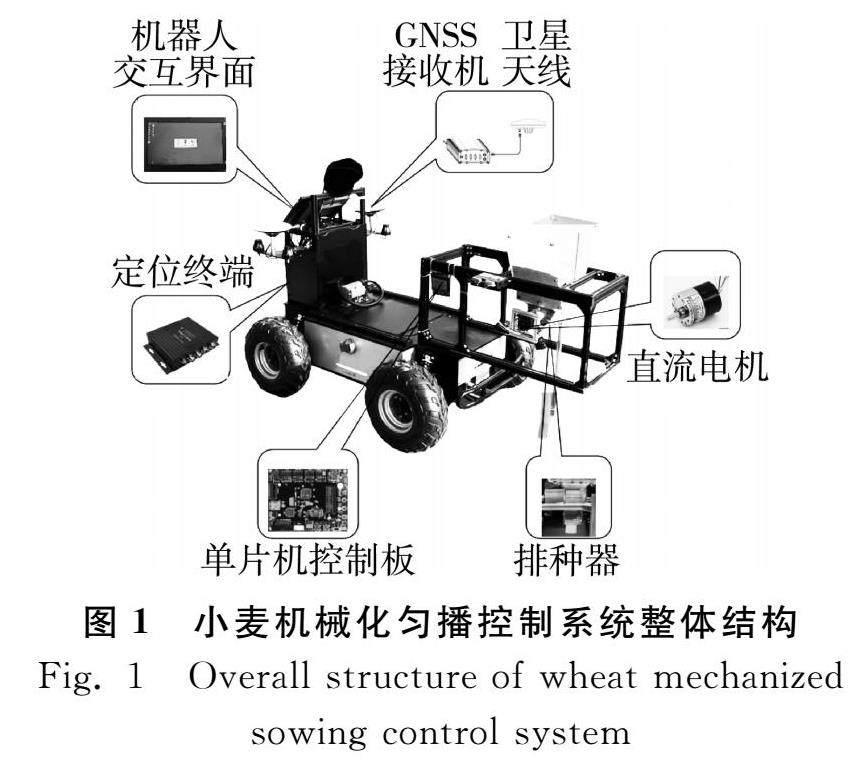
1 整体结构与工作原理
小麦机械化匀播控制系统整体结构如图1所示,其主要由轮式行驶机器人、控制硬件部分、播种装置等组成。轮式行驶机器人搭载卫星导航模块、独立电源、工控系统、定位终端;控制硬件部分由STM32F103单片机、电阻显示屏、DAP仿真器等组成;播种装置由直流电机、外槽轮排种器、绕线弹性联轴器、种箱、导钟管、台架等组成。其中单片机可同时控制多路排种器电机,整个控制系统成本低,实用性强。
选用STM32F103单片机为控制系统处理器,搭配独立显示屏,使用C语言编程设计算法,程序通过DAP仿真器下载至单片机内部,编译环境为Keil μVision5集成开发环境。播种装置通过台架搭载在轮式行驶机器人上,采用直流电机驱动排种器,并通过绕线弹性联轴器与排种器转轴相连,改变电机转速可控制播种量。轮式行驶机器人配置的卫星导航模块,通过差分算法精确计算其实时行驶速度,并通过外设串口将处理过的速度信号传输至STM32F103单片机控制器中,将设计算法通过控制程序实现,由此控制排种器电机的转速变化来调节播量,实现均匀播种。
2 控制系统设计
2.1 硬件模块选型与设计
轮式行驶机器人为四轮独立驱动,通过无线遥控和指令控制其实现变速行驶,外设24 V电源,用于系统动力驱动与排种器电机工作,轮式行驶机器人尾部拓展平台可负载70 kg,实现自定义功能拓展,用于搭载播种装置。
选用STM32F103单片机为系统处理器,基于ARM内核,自带各种常用通信接口,可同时控制多个设备,其具有通信速度快,ADC转换速度快,工作电压低,IO复用功能等优点。外接3.2寸电阻显示屏,用于人机互动界面开发,通过DAP仿真器为开发板下载程序和在线调试代码。
排种器电机选型需要考虑到电机功率、排种器转速、排种器扭矩等参数,电机功率应满足排种器动力性能要求。功率计算公式如式(1)所示。
P=TDnD9 550
(1)
式中:
P——电动机功率,kW;
TD——负载加到电动机的转矩,N·m;
nD——电动机转速,r/min。
一般排种器所需驱动扭矩相对较小,约3~6 N·m,转速在10~50 r/min,根据式(1)计算所需最大电机功率为15 W即可满足要求,因此选用XD-WS37GB555型直流电机,电压为24 V,空载状态下,转速为50 r/min,电流为0.15 A,功率为15 W。
设计后置台架及播种装置如图2所示,通过后置台架将排种器外接在轮式行驶机器人上,该台架可上下调整高度,实现排种口离地高度可调,前后位置可调。排种器为外槽轮式,种箱选用透明亚克力板,按照设计尺寸制作,重量轻且透明,可观测箱内种子情况。
2.2 轮式变速机器人定位模块
轮式行驶机器人装载卫星导航模块,实时检测行驶速度,其导航模块速度精度RMS为0.03 m/s,对排种器播量控制误差最大影响为0.077 g/m2,因此可忽略因导航模块误差造成的播量误差。用RS232串口线把定位终端和用于配置的PC连接起来,通过5G网络与数据网络平台建立通道,把位置信息发给差分服务器,同时接收差分信息,并通过RS232向PC端输出精准位置信息。其中串口波特率为115200,选用NTRIP协议设置,通信接口的通信默认波特率为115200,数据格式为8N1。定位数据通讯流程如图3所示。
2.3 控制算法设计
本文设计多级控制模型,通过调节直流电机的励磁电流实现電机转速的调整[13],一级控制参数为轮式行驶机器人实时行驶速度信号,二级控制为速度电流双闭环控制,控制参数为排种器电机实时转速和电流。一级控制选用PID控制,二级控制选用模糊PID控制,其控制流程如图4所示。
基于Matlab中Simulink环境,利用其库内丰富的模块,建立电机多级控制模型[1415],验证本文设计的多级混合算法控制的可行性,其仿真模型如图5所示。设定起始目标转速为10 r/min,经过3 s后转速提高至20 r/min,仿真时间设置5 s,结果如图6所示。从仿真结果可以看出,设定起始目标转速10 r/min,约0.075 s达至稳定状态,响应时间短,超调量为0.74,较小;3 s时转速提高至20 r/min,约0.081 s达到稳定状态,响应时间短,超调量为0.74,说明该多级控制算法可行且效果较好。
2.4 电机调速控制流程
小麦机械化匀播控制系统流程如图7所示。
轮式行驶机器人通过编写指令调用四轮驱动电机底层控制程序,打开定时器,设定目标速度函数,改变机器人行驶速度,并实时向STM32F103单片机控制器传输当前速度。设定目标播种量E(t),查看单片机控制总中断是否开启,接收轮式行驶机器人实时行驶速度,依据E(t)、排种器排种量P(t)与机具行驶速度v(t)的关系计算排种器电机理论转速n,控制直流电机按照理论转速进行排种。获取直流电机霍尔传感器信息,检测排种器转速是否达到理想转速,若否,触发二级双闭环控制程序,再次进行模糊PID控制调整,做到匀播作业。在人机互动屏幕界面设置停止按钮,可远程控制停止播种作业。
3 试验验证
3.1 试验参数
单位时间内单位面积上的目标播种量E(t)可表示为[1517]
E(t)=P(t)0.06Hv(t)
(2)
式中:
P(t)——单个排种器排种量,g/min;
H——播种行间距,m;
v(t)——机具行驶速度,km/h。
P(t)和排种器电机转速n的标定公式如式(3)所示。
P(t)=kn+c
(3)
式中:
k、c——标定试验测定系数。
联立式(2)和式(3),则排种器电机转速、目标播种量以及机具行驶速度之间关系可表示为
n=0.06E(t)Hv(t)k-ck
(4)
根据式(4)可知,当机具行驶速度发生变化时,控制器可以实时接收机具行驶速度信号,并且同步调整排种器轴的转速,确保排种器排种量与目标播种量一致[18]。
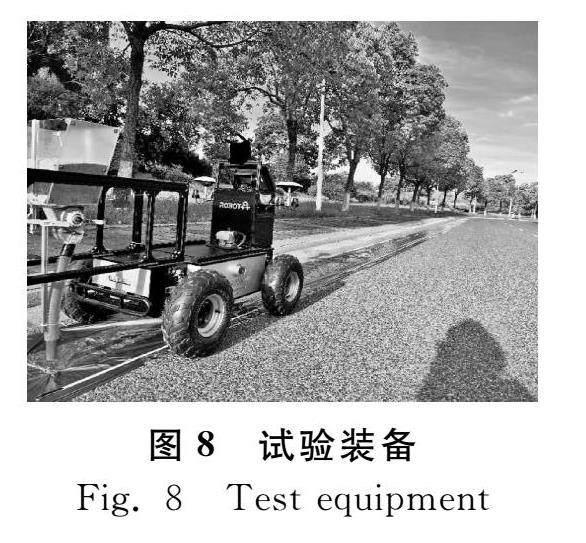
3.2 试验设计
试验于2022年8月1日在扬州大学扬子津校区进行,试验装备如图8所示。试验前先标定式(3)中k、c两个参数值,设置排种器电机转速从2 r/min递增至34 r/min,定时收集排出种子称量并记录数据,进行数据分析,拟合排种器排量和排种器电机转速关系曲线,得k、c值。
1) 轮式行驶机器人恒速状态下的播量稳定性试验。在系统控制器内输入测定的k、c值,设定轮式行驶机器人三挡速度为1.5 km/h、3 km/h、5 km/h,每档速度分别设置7.5 g/m2、15 g/m2、22.5 g/m2三种目标播量,以检验恒速状态下的系统播量稳定性。设置轮式行驶机器人每组速度行驶10 m,重复试验5次,收集排出种子称量并记录数据。
2) 轮式行驶机器人变速状态下的播量稳定性试验。划定50 m作业区段,放置50 m标尺,设置轮式行驶机器人每档速度行驶10 m后改变行驶速度,使得机具作业速度不断变化。设置速度由低速变至高速,然后由高速变至低速,设置速度变化曲线如图9所示。试验分别设置7.5 g/m2、15 g/m2、22.5 g/m2三种目标播量,在距离5 m、10 m、15 m、20 m、25 m、30 m、35 m、40 m、45 m采集1 m长播种带试验样本,称量并记录各样本种子质量。
3.3 试验结果
图10为排种器播种量和排种器电机转速曲线,可以发现,在一定转速范围内,排种器播种量与排种器电机转速呈线性关系,说明该排种器性能良好,测得k值为14.17,c值为1.43。
表1为轮式行驶机器人恒速状态下的播量稳定性试验结果。从表1可以发现,在轮式行驶机器人以不同速度行驶过程中,实际播量与目标播量都十分接近,其标准差都在0.5 g/m2以内,排种稳定性好,且播量控制精度都在96.8%以上,说明在机具以不同速度行驶情况下,该匀播控制系统对排种器电机转速控制符合设定目标。
图11为轮式行驶机器人变速状态下的播量稳定性试验结果。可以发现,在轮式行驶机器人变速行驶过程中,其实际播量与目标播量差值小,变化平稳,播量控制精度在95.1%以上,精度高。验证智能排种控制程序可行,可实现变速匀播。
4 结论
1) 本文設计了小麦机械化匀播控制系统,采用STM32F103单片机控制排种器直流电机转速,搭载在可以实现自动变速行驶的轮式机器人上,依据轮式行驶机器人实时行驶速度,控制排种电机转速,实现均匀播种。
2) 采用多级控制直流电机转速,一级控制参数为轮式行驶机器人实时行驶速度信号,选用传统PID控制;二级控制为速度电流双闭环控制,控制参数为排种器电机实时电流和转速,选用模糊PID控制。仿真结果表明,控制响应时间短,超调量小,控制效果良好。
3) 播种试验结果表明,轮式行驶机器人恒速状态下的播量稳定,其标准差都在0.5 g/m2以内,排种稳定性好,播量控制精度都在96.8%以上;轮式行驶机器人变速状态下的播量稳定,其实际播量与目标播量差值小,变化平稳,播量控制精度在95.1%以上,精度高。
参 考 文 献
[1]胡国平, 邹建国, 郑威, 等. 不同播种方式对稻茬小麦生长发育和产量的影响[J]. 湖北农业科学, 2014, 53(20): 4814-4816.
Hu Guoping, Zou Jianguo, Zheng Wei, et al. Effects of planting methods on the growth and yield of wheat in ricewheat rotation [J]. Hubei Agricultural Sciences, 2014, 53(20): 4814-4816.
[2]刘真. 不同播种方式对小麦生长的影响[J]. 农业工程技术, 2022, 42(8): 15-16.
Liu Zhen. Effects of different sowing methods on wheat growth[J]. Agricultural Engineering Technology, 2022, 42(8): 15-16.
[3]季中亚. 不同机械播种方式对稻茬小麦生长、产量及效益的影响[D]. 扬州: 扬州大学, 2015.
Ji Zhongya. Effects of different mechanical sowing methods on growth yield and economic efficiency of wheat [D]. Yangzhou: Yangzhou University, 2015.
[4]Inoti I K, Namikawa K. Electronicallycontrolled pneumatic precision planter (Part 2) solenoid operated seed metering [J]. Journal of the Japanese Society of Agricultural Machinery, 1991, 53(3): 67-73.
[5]Ibrahim E J, Liao Q, Wang L. Design and experiment of multirow pneumatic precision metering device for rapeseed[J]. International Journal of Agricultural and Biological Engineering, 2018, 11(5): 116-123.
[6]Iacomi C, Popescu O. A new concept for seed precision planting [J]. Agriculture and Agricultural Science Procedia, 2015, 6: 38-43.
[7]Leemans V, Destain M F. A computervision based precision seed drill guidance assistance [J]. Computers and Electronics in Agriculture, 2007, 59(1-2): 1-12.
[8]娄秀华. 精密播种机排种自动控制装置[J]. 中国农业大学学报, 2004, 9(2): 15-17.
Lou Xiuhua. Controller for seed metering device used in precision drill [J]. Journal of China Agricultural University, 2004, 9(2): 15-17.
[9]唐尧华. 基于拖拉机前轮转速的排种驱动系统的研究[D]. 保定: 河北农业大学, 2009.
Tang Yaohua. Research on the planing drive system based on a tractor frontwheel speed [D]. Baoding: Hebei Agricultural University, 2009.
[10]冯玉岗, 金诚谦, 袁文胜, 等. 基于卫星测速小麦精量电驱式播种控制系统[J]. 中国农机化学报, 2020, 41(12): 124-130.
Feng Yugang, Jin Chengqian, Yuan Wensheng, et al. Research on precision electric seeding control system based on satellite velocity measurement for wheat [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(12): 124-130.
[11]徐琪蒙, 李洪文, 何进, 等. 小麥播种自走式农用移动平台设计与试验[J]. 农业工程学报, 2021, 37(14): 1-11.
Xu Qimeng, Li Hongwen, He Jin, et al. Design and experiment of the selfpropelled agricultural mobile platform for wheat sowing [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(14): 1-11.
[12]Zhao Zhan, Wu Yafang, Yin Jianjun, et al. Monitoring method of rice seeds mass in vibrating tray for vacuumpanel precision seeder [J]. Computers and Electronics in Agriculture, 2015, 114: 25-31.
[13]张洪帅, 王平, 韩邦成. 基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测[J]. 中国电机工程学报, 2014, 34(12): 1889-1896.
Zhang Hongshuai, Wang Ping, Han Bangcheng. Rotor position measurement for highspeed permanent magnet synchronous motor based on Fuzzy PI MRAS [J]. Proceedings of the CSEE, 2014, 34(12): 1889-1896.
[14]谭星祥. 变量施肥性能测试平台的设计与实现[D]. 南京: 南京农业大学, 2014.
Tan Xingxiang. Design and implementation of variable rate fertilization performance test platform [D]. Nanjing: Nanjing Agricultural University, 2014.
[15]赵天才, 余洪锋, 郝向泽, 等. 基于PID算法的水稻直播机播量控制系统的设计与试验[J]. 华南农业大学学报, 2019, 40(2): 118-125.
Zhao Tiancai, Yu Hongfeng, Hao Xiangze, et al. Design and experiment of sowing control system for rice direct seeder based on PID algorithm [J]. Journal of South China Agricultural University, 2019, 40(2): 118-125.
[16]余洪鋒, 丁永前, 刘海涛, 等. 小田块变量施肥系统优化设计与应用[J]. 农业工程学报, 2018, 34(3): 35-41.
Yu Hongfeng, Ding Yongqian, Liu Haitao, et al. Optimization design and application of variable rate fertilization system for smallscaled fields [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(3): 35-41.
[17]余洪锋, 丁永前, 谭星祥, 等. 施肥机施肥性能检测装置的设计与试验[J]. 南京农业大学学报, 2016, 39(3):511-517.
Yu Hongfeng, Ding Yongqian, Tan Xingxiang, et al. Design and experiments on equipment for detecting performance of fertilizer applicator [J]. Journal of Nanjing Agricultural University, 2016, 39(3): 511-517.
[18]丁筱玲. 小麦智能精播系统及自主导航机理研究与实现[D]. 济南: 山东大学, 2018.
Ding Xiaoling. Research and implementation of intelligent wheat precision sowing system and autonomous navigation mechanism [D]. Jinan: Shandong University, 2018.
