基于离散元的棉田仿生减阻犁体设计与试验
2024-05-22刘进宝郑炫杨怀君李帆王子龙张鲁云
刘进宝 郑炫 杨怀君 李帆 王子龙 张鲁云

摘要:針对当前铧式犁在棉田土壤犁耕作业过程中易黏附、阻力大、能耗高等问题,立足两种典型棉田土壤,以犁体、棉田土壤和两者之间的相互作用为研究对象,提出犁体曲面模型优化和表面结构仿生相结合的方法。以穿山甲体表的鳞片三角圆弧状结构和蜣螂体表的凸包结构相结合作为仿生原型,研制一种棉田仿生脱附减阻犁体,分别对两种棉田土壤的物理和化学特性进行试验测定并建立离散元模型。进行传统犁体与仿生犁体的耕作过程仿真与试验,在1号土样中仿生犁体相对传统犁体减阻5.4%,土壤减粘性能提升44.15%;在2号土样中仿生犁体相对传统犁体减阻7.8%,土壤减粘性能提升45.49%,研究结果表明仿生犁体对棉田土壤减粘降阻效果明显。
关键词:农业机械;棉田土壤;仿生犁体;离散元;抗黏减阻
中图分类号:S222.1
文献标识码:A
文章编号:20955553 (2024) 02001307
收稿日期:2022年6月29日 修回日期:2022年8月20日
基金项目:新疆兵团区域创新引导计划(2021BB015);第八师石河子市中青年科技创新骨干人才(2021RC01);新疆农垦科学院院级科技计划项目(2020YJ012)
第一作者:刘进宝,男,1988年生,甘肃天水人,硕士,副研究员;研究方向为大型高效智能耕作机械。Email: jinbao1226@126.com
通讯作者:郑炫,女,1971年生,江苏徐州人,研究员,硕导;研究方向为高端耕整地装备。Email: jiazhengxuan@sohu.com
Design and experiment of bionic drag reduction plough in cotton field
based on discrete element method
Liu Jinbao, Zheng Xuan, Yang Huaijun, Li Fan, Wang Zilong, Zhang Luyun
(Machinery Equipment Research Institute, Xinjiang Academy of Agricultural and Reclamation Science, Shihezi, 832000, China)
Abstract:
In view of the problems of easy adhesion, high resistance and high energy consumption of the current moldboard plough in the process of cotton field soil ploughing, this research was based on two typical cotton field soils. Taking the plough body, cotton field soil and the interaction between them as the research object, a method combining the optimization of plough surface model and bionic surface structure was proposed. Taking the scale triangular arc structure of pangolin body surface and the convex hull structure of dung beetle body surface as the bionic prototype, a bionic desorption drag reduction plough body in cotton field was developed. The physical and chemical properties of two kinds of cotton soil were measured and the discrete element model was established. The simulation comparison test of tillage resistance between traditional plough and bionic plough was carried out. In No.1 soil sample, the bionic plough reduced the resistance by 5.4% compared with the traditional plough, and the soil viscosity reduction performance increased by 44.15%. In No.2 soil sample, the bionic plough reduced the resistance by 7.8% compared with the traditional plough, and the soil viscosity reduction performance was improved by 45.49%. The research results showed that the bionic plough had an obvious effect on reducing the viscosity and resistance of cotton soil.
Keywords:
agricultural machinery; cotton soil; bionic plough; discrete element method; viscosity resistance and drag reduction
0 引言
犁体作为典型的耕作机具触土部件,作业过程产生大量的能耗,尤其在黏重土壤条件下耕作时,大量土壤黏附在犁体表面,增大了耕作阻力,影响犁体的入土、翻垡、碎土、覆盖等作业性能,降低犁耕作业效率与质量。如何降低耕作部件的能源消耗,关键是土壤与耕作部件相互作用问题的研究[12]。如何实现土壤减粘降阻,一直是耕作机械的技术难题。由于土壤固有的黏附特性不易改变,只能通过优化改进耕作机具触土部件,实现土壤的减粘脱附。综合分析现有对触土部件减粘降阻技术的研究,主要分为机械脱附技术和仿生技术等[35]。
机械脱附技术主要通过对犁体曲面与土壤间的作用关系进行分析和优化[6],利用清理装置或振动装置实现减粘,例如朱亨银等[7]提出的驱动圆盘犁和铧式犁组合而成的组合式左翻驱动圆盘犁,入土力矩显著增大,实现了减阻的效果。任露泉等[89]提出了生物仿生技术,包括结构仿生脱附、材料仿生脱附和电渗仿生脱附,仿生非光滑表面可以减少界面的土壤黏附,从而具有减粘降阻的作用。李建桥等[10]基于蜣螂体表结构设计了一种常速仿生犁壁,能够实现减粘脱附性能。马云海等[11]通过模仿蚯蚓结构和运动行为设计的仿生开沟器可减少触土部件表面土壤黏附。Zhang等[12]研究表明蚯蚓表皮黏液的流变特性具有明显的减阻和润滑作用,可用在耕整机械的工作部件上。Ren等[13]基于蚯蚓表面的电渗结构,提出仿生非光滑表面电渗原理,试验表明推土板无明显黏附现象。Soni等[14]基于蜣螂体表结构与高分子聚乙烯材料仿生设计犁壁结构,能够减少土壤黏附。以上关于犁体减粘降阻的研究主要集中在仿生结构及应用,研究過程没有深入的结合土壤类型和犁体曲面模型的优化。
由于在不同地区、不同种植作物和农艺要求等条件下,使得土壤物理特性及力学特性复杂多变,现有对我国西北干旱地区棉田土壤物理特性以及土壤耕作部件减阻理论还比较少。因此以高速犁体曲面作为研究对象,立足西北干旱地区棉田土壤条件,提出犁体曲面模型优化和表面结构仿生相结合的方法,开展棉田土壤力学特性和犁体仿生减阻研究,提高犁体高速减粘低阻性能。以期为低能耗犁耕技术提供理论基础。
1 犁体曲面设计
1.1 犁体曲面模型设计
针对粘性土壤质地松软,土壤坚实度相对较小,土壤易破碎和易黏附的特点,通过前期试验对比分析,减小最大翻土角和最大碎土角,以及提高作业速度可一定程度改善土壤黏附犁体界面的现象。因此,通过对犁体的翻土角和碎土角进行优化设计,选用水平直元线法来设计犁壁曲面,同时将穿山甲体表的鳞片三角圆弧状结构和蜣螂体表的凸包结构相结合,进行高速减粘犁壁结构的设计。
犁体曲面导曲线设计[1]如图1所示,由两段组成,其中第一段为直线部分,对应犁体的犁铧部分;第二段为一段圆锥曲线。圆锥曲线的斜率随高度的增加逐渐增大,有利于土壤在犁壁中间位置处随犁体曲面向上抬升及翻垡。对其建立导曲线的数学模型,设圆锥曲线部分参数方程如式(1)所示。
x2+Az2+Bxz+Cx+Dz=0
(1)
本文主要考虑犁体减阻问题,根据犁耕作业要求,取入土角ε0为25°,犁铲直线部分的长度S取150mm;犁体总高度h为600mm,初始元线角θ0为38°,元线角θ逐渐减小,在犁体中部抬垄部分元线角变化较慢,在犁体上部翻垄部分元线角变化较快。犁铧部分选取直线,其余部分选取抛物线,犁铧高度z1=Ssinθ0=92.35mm。
1.2 仿生结构设计
Soni等[14]根据甲虫特性,将超高分子量聚乙烯材料仿生突起安装耕作部件上,试验表明黏性土壤中仿生结构阻力得到有效降低。大量研究[37]均表明犁体仿生非光滑表面能有效降低土壤黏附作用,因此本文利用动物体表凸起结构,进行仿生犁体结构设计。
将穿山甲体表的鳞片三角圆弧状结构和蜣螂体表的凸包结构相结合,按照比例放大表面轮廓结构尺寸,沿着土迹线依次排列在犁壁上,结构如图2所示。
图2中,a为凸起前端宽度,b为凸起后端宽度,c为凸起高度,e为凸起前后端距离,xc为凸起排列间隔距离。本文设置a=5mm,b=20mm,c=3mm,e=25mm,xc=20mm。
1.3 犁体阻力分析
Saunders[15]、Godwin[16]等提出了摩尔—库仑土壤剪切理论阻力模型,并基于该理论建立了犁体阻力模型,犁体阻力包括切削土壤阻力,翻垡土壤摩擦力和土壤翻转阻力,犁侧板摩擦力等。犁体受力情况如图3所示。
1.犁铲尖 2.犁侧板 3.犁壁 4.犁铧
当犁体向前耕作时,运动方向受力如式(2)所示。
Fz=Fc+Fhx+Fbx+Fe+Fhf+Fbf+Fsf
(2)
式中:
Fz——犁体耕作阻力,kN;
Fc——犁铲尖切削土壤阻力,kN;
Fhx——犁铧切削土壤阻力,kN;
Fbx——
土壤在犁壁上产生的摩擦力和翻垡过程土壤动量变化产生的阻力,kN;
Fe——翻垡土壤势能增加产生的阻力,kN;
Fhf——犁铧横向力产生的摩擦力,kN;
Fbf——犁壁横向力产生的摩擦力,kN;
Fsf——土壤横向运动对犁壁产生的阻力,kN。
参考前期研究方法[17],当耕宽为0.35m时,理论计算可得该犁体在不同工况下的耕作阻力,如表1所示。
2 棉田土壤特性
新疆棉花种植地区属于旱作农田,土壤偏盐碱化,本文以新疆石河子市棉田土壤为研究对象,分别对121团32连和大庙村土壤进行采样,获得2种不同类型的土壤,1号土样为121团32连棉田土壤,当季未耕土壤平均含水率为24.2%。2号土样为大庙村棉田土壤,当季未耕土壤平均含水率为36.7%。
分别对两种土样的化学特性进行了测定,其中土壤pH值的测定采用HJ962-2018电位法,碳酸根、碳酸氢根的含量采用电位滴定法,钾钠钙镁、硫酸根、氯离子的含量采用色谱法,土壤电导率的测定采用HJ802-2016电极法。1号土样每千克土壤有机质含量为13.261g,2号土样每千克土壤有机质含量为52.886g。2种土样的主要化学特性如表2所示。
同时对两种土样的粒径分布进行了测定,试验设备为BT-2001型激光粒度分布仪,1号土样中位径(D50)为10.43um,2号土样中位径(D50)为12.68um,土壤粒径分布如图4所示。
通过对两种土样特性进行对比可知,两种土样的化学离子含量差异较大,粒径分布差异较小,1号土样有机质含量较高。通过前期耕作试验对比,土壤相对松软,碎土能量消耗较小,犁体在两种土壤中耕作时均产生黏附现象,其中2号土壤的黏附较为严重,土壤黏附在犁体表面,使土壤翻垡过程不畅,增大了耕作阻力。
3 土壤仿真模型
3.1 接触模型
本文采用EDEM软件建立土壤仿真模型,EDEM软件包含有HertzMindlin无滑动接触模型、HertzMindlin黏结接触模型、线性黏附接触模型和HertzMindlin with JKR模型等[18],根据对两种棉田土壤的测定分析,1号土样选用HertzMindlin无滑动接触模型,2号土样选用HertzMindlinwith JKR模型。土壤的颗粒形状、尺寸、密度、泊松比和剪切模量等,通过参考相关研究结论获取。材料参数如表3所示。
3.2 接触参数
本文通过测量土壤休止角和土壤滑动摩擦角确定土壤摩擦系数参数。试验方法参考相关研究[1920],试验装置如图5所示。
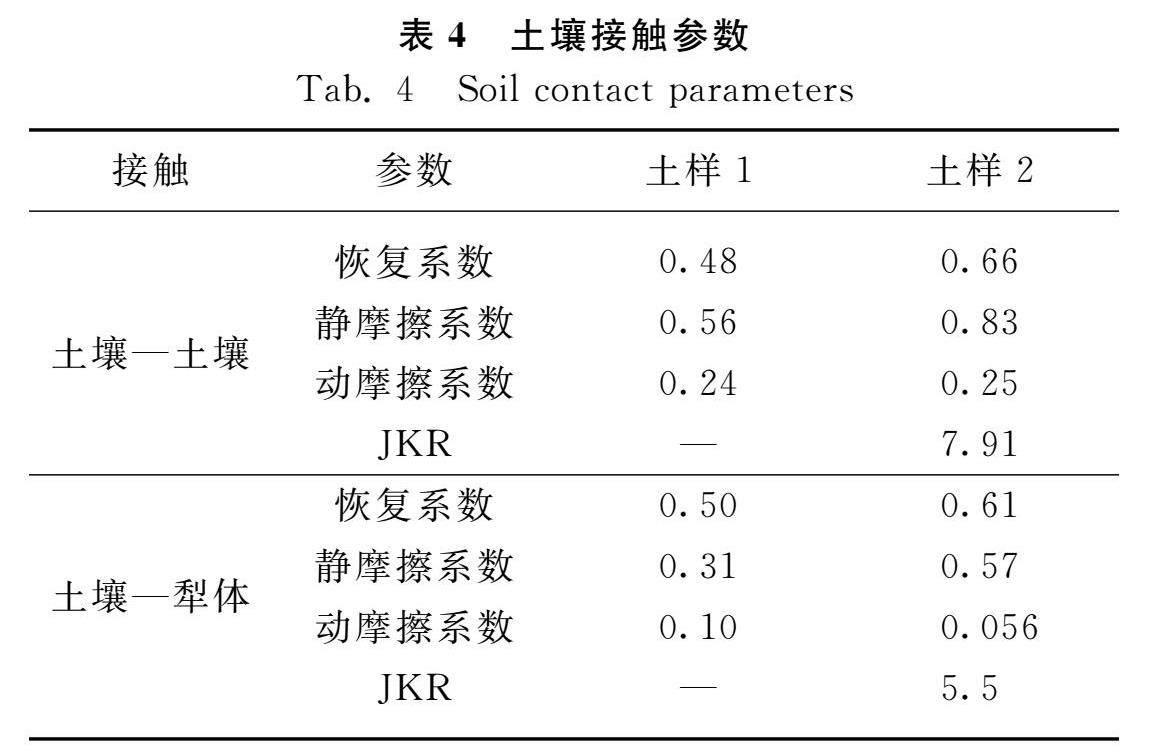
将土样从漏斗内自由下落,在台架底部上会形成小土堆,利用倾角仪从4个不同方向对土壤堆的休止角进行测量。将土样放于斜面上,通过改变斜面倾角,当斜面土壤开始从滑落,测量此时斜面倾角值,通过测量角度获得摩擦系数,如式(3)所示。测得接触参数如表4所示。
f=tanθ
(3)
式中:
f——摩擦系数;
θ——摩擦角,(°)。
4 仿真试验
4.1 犁体阻力对比分析
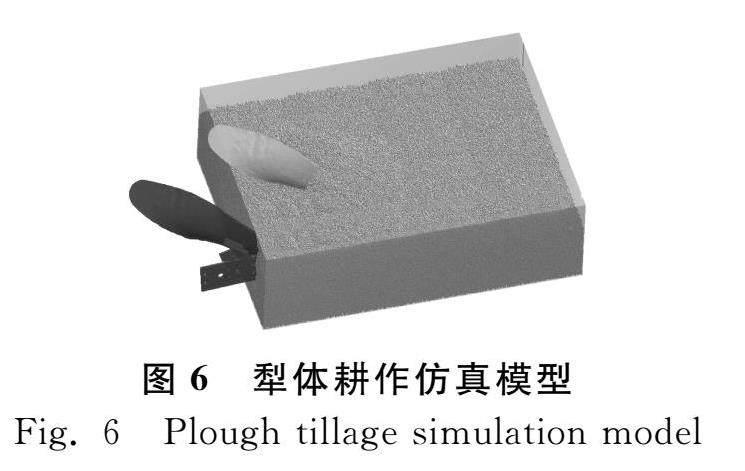
首先利用SolidWorks软件建立仿生减粘犁体三维模型,然后导入EDEM软件,分别建立两种土壤模型,定义土壤和犁体材料参数。设置土壤颗粒间、土壤与犁体间的接触参数。仿真模型如图6所示。仿真模型由两铧犁体组成,前铧犁体主要作用是开沟,后铧犁体为正常耕作状态。试验对比过程主要测量后铧犁体耕作相关数据。
通过将土壤颗粒显示方式设置为Vector方式和Stream流方式,得到土壤颗粒矢量流动方向,如图7所示,可以直观看出土壤颗粒在犁体表面的流动轨迹。
为减小土壤黏附现象和犁体耕作阻力,将传统犁体与仿生犁体进行仿真对比试验,通过仿真测定犁体完全进入土壤后耕作稳定状态下的阻力值。
由图8犁体耕作阻力值可知,在1号土样中传统犁体平均耕作阻力为6934N,仿生减粘犁体平均耕作阻力为6558N,仿生减粘犁体相对传统犁体减阻5.4%。在2号土样中传统犁体平均耕作阻力为7157N,仿生减粘犁体平均耕作阻力为6594N,仿生减粘犁体相对传统犁体减阻7.8%。同时可以看出,在相同耕作参数条件下,2号黏性土壤耕作阻力较大,表明黏性土壤对耕作部件会产生更大的阻力。犁体耕作过程如图9所示。
耕作阻力仿真结果表明,相对于传统犁体,仿生犁体结构能在一定范围内降低土壤耕作阻力。
4.2 犁沟仿真与试验对比
试验过程中设置犁体耕深为300mm,耕宽为350mm,耕作速度為2.78m/s。在两种土样环境中分别进行仿生减粘犁体仿真和田间试验对比,得到后铧犁体耕作后的犁沟形状和尺寸,如图10所示。
分别测量仿真犁沟和试验犁沟的沟型和尺寸参数,每种土样分别测量5次计算平均值,得到如表5所示沟型尺寸数据。
通过仿真和试验对比可以看出,两种土样条件下的仿真犁沟沟型和试验犁沟沟型基本吻合。两种土样中,仿真过程的犁沟沟型尺寸相对试验偏小,因仿真土样接触参数设定后土壤颗粒分布均匀,参数统一,犁体耕作过程翻垡后的微小部分土壤颗粒滚动跌落至犁沟,回填了犁沟,实际田间试验时,由于环境的差异使不同空间分布的土壤有一定不同,造成了仿真和试验的微小差别。
1号土样犁沟与2号土样犁沟相比,犁耕后1号土样相对松散,土壤颗粒黏附现象小,土壤颗粒间空隙相对较大,因此仿真环境的沟底角略大。而2号土样具有黏附作用,犁耕后土壤颗粒间存在黏结现象,使得上层土壤颗粒不易跌落至犁沟,因此沟底角接近实际值。
5 田间试验
2022年3月分别在新疆石河子市北泉镇大庙村和121团选取了两种土壤试验田进行田间试验。试验仪器有SC-900土壤坚实度仪、TDR300土壤含水率检测仪、皮尺、钢板尺、电子秤等,阻力测量采用黑龙江省农业机械工程科学研究院研制的犁具专用遥测仪采集器。田间土壤含水率和坚实度如表6和表7所示。
田间试验配套动力为迪尔2204型拖拉机,试验犁体有3种:传统犁体、光滑减粘犁体(优化的犁体曲面,但未应用仿生结构)、仿生减黏犁体。试验过程中设置犁体耕深为300mm,耕宽为350mm,耕作速度为2.78m/s。试验过程中,犁体每作业5km,测量一次土壤黏附量,将3种试验犁体表面黏附的土壤分别称重,每种犁体测量3组数据取平均值。
测量结果显示,在1号土壤中,传统犁体土壤黏附量为5.82kg,光滑减黏犁体土壤黏附量为4.96kg,仿生减黏犁体土壤黏附量为3.25kg,其中仿生减黏犁体对土壤的减黏效果最为明显,光滑减黏犁体相对传统犁体土壤减黏性能提升14.78%。仿生减黏犁体相对传统犁体土壤减黏性能提升44.15%。仿生非光滑结构的减黏效果较好。减黏效果如图11所示。
在2号土壤中,传统犁体土壤黏附量为8.66kg,光滑减黏犁体土壤黏附量为4.81kg,仿生减黏犁体土壤黏附量为4.72kg,光滑减黏犁体相对传统犁体土壤减黏性能提升44.45%。仿生减黏犁体相对传统犁体土壤减黏性能提升45.49%。仿生减黏犁体和光滑减黏犁体均能有效减小土壤黏附,但在2号土壤中,仿生非光滑结构的减黏效果不明显。减黏效果如图12所示。
从试验结果来看,在两种土壤中,光滑减黏犁体和仿生减黏犁体均能在一定程度上减小土壤黏附,尤其是在1号土壤中,仿生减黏犁体减黏性能有明显的提升。在2号土壤中,根据土壤特性试验来看,2号土壤化学元素含量差异较大,化学吸附较为明显,因此后续研究需打破土壤与犁体界面的化学吸附,进一步提高犁体减黏性能。
6 结论
1) 提出犁体曲面模型优化和表面结构仿生相结合的方法,以穿山甲体表的鳞片三角圆弧状结构和蜣螂体表的凸包结构相结合作为仿生原型,研制了一种棉田仿生脱附减阻犁体。导曲线为圆锥曲线,初始元线角为38°,仿生凸起结构前端宽度为5mm,后端宽度为20mm,凸起高度为3mm。
2) 分别对2种棉田土壤的物理和化学特性进行了试验测定,并建立了离散元模型,1号土样选用HertzMindlin无滑动接触模型,2号土样选用HertzMindlin with JKR模型。仿真试验表明,在1号土样中仿生犁体相对传统犁体减阻5.4%,在2号土样中仿生犁体相对传统犁体减阻7.8%。
3) 进行了犁耕减粘性能田间试验,在1号土壤中,仿生减黏犁体相对传统犁体土壤减黏性能提升44.15%。在2号土壤中,仿生减黏犁体相对传统犁体土壤减黏性能提升45.49%。研究结果表明仿生犁体对棉田土壤减黏降阻效果明显。
参 考 文 献
[1]中国农业机械化科学研究院. 农业机械设计手册[M]. 北京: 中国农业科学技术出版社, 2007.
[2]李宝筏. 农业机械学[M]. 北京: 中国农业出版社, 2003.
[3]王莲冀, 廖劲杨, 胡红, 等. 农机触土部件减粘脱附技术研究现状与展望[J]. 中国农机化学报, 2021, 42(8): 214-221.
Wang Lianji, Liao Jinyang, Hu Hong, et al. Research status and prospect of adhesion reduction and desorption technology for agricultural machinery parts touching soil [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(8): 214-221.
[4]郑侃. 耕整机械土壤减粘脱附技术研究现状与展望[J]. 安徽农业大学学报, 2019, 46(4): 728-736.
Zheng Kan. Research status and prospect of soil antiadhesion technology for tillage equipment [J]. Journal of Anhui Agricultural University, 2019, 46(4): 728-736.
[5]贾洪雷, 王万鹏, 陈志, 等. 农业机械触土部件优化研究现状与展望[J]. 农业机械学报, 2017, 48(7): 1-13.
Jia Honglei, Wang Wanpeng, Chen Zhi, et al. Research status and prospect of soilengaging components optimization for agricultural machinery [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7): 1-13.
[6]劉进宝, 郑炫, 孟祥金, 等. 铧式犁犁体曲面研究现状与展望[J]. 中国农机化学报, 2021, 42(3): 13-21.
Liu Jinbao, Zheng Xuan, Meng Xiangjin, et al. Current situation and prospect of research on plough surface [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(3): 13-21.
[7]朱亨银, 方文熙. 组合式左翻驱动圆盘犁的入土及平衡性能计算分析[J]. 农业工程学报, 2011, 27(12): 29-32.
Zhu Hengyin, Fang Wenxi. Calculation and analysis on capability of embedment and balance of synthesized leftturn driven disc plow [J]. Transactions of the Chinese Society of Agricultural Engineering, 2011, 27(12): 29-32.
[8]任露泉, 丛茜, 陈秉聪, 等. 几何非光滑典型生物体表防粘特性的研究[J]. 农业工程学报, 1990, 6(1): 1-7.
Ren Luquan, Cong Qian, Chen Bingcong, et al. A study the adhesion reducing character of geometric non smooth surface of typical animal [J]. Transactions of the Chinese Society of Agricultural Engineering, 1990, 6(1): 1-7.
[9]任露泉, 叢茜, 吴连奎, 等. 仿生非光滑推土板减粘降阻的试验研究[J]. 农业机械学报, 1997, 28(2): 3-7.
Ren Luquan, Cong Qian, Wu Liankui, et al. A test study on adhesion and resistance reduction of bionic non smooth bulldozing plates [J]. Transactions of the Chinese Society for Agricultural Machinery, 1997, 28(2): 3-7.
[10]李建桥, 任露泉, 刘朝宗, 等. 减粘降阻仿生犁壁的研究[J]. 农业机械学报, 1996, 27(6): 1-4.
Li Jianqiao, Ren Luquan, Liu Chaozong, et al. A study the bionic plow moldboard of reducing soil adhesion and plowing resistance [J]. Transactions of the Chinese Society for Agricultural Machinery, 1996, 27(6): 1-4.
[11]马云海, 马圣胜, 贾洪雷, 等. 仿生波纹形开沟器减黏降阻性能测试与分析[J]. 农业工程学报, 2014, 30(5): 36-41.
Ma Yunhai, Ma Shengsheng, Jia Honglei, et al. Measurement and analysis on reducing adhesion and resistance of bionic ripple opener [J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(5): 36-41.
[12]Zhang D, Chen Y, Ma Y, et al. Earthworm epidermal mucus: Rheological behavior reveals dragreducing characteristics in soil [J]. Soil and Tillage Research, 2016, 158: 57-66.
[13]Ren L, Cong Q, Tong J, et al. Reducing adhesion of soil against loading shovel using bionic electroosmosis method [J]. Journal of Terramechanics, 2001, 38(4): 211-219.
[14]Soni P, Salokhe V M, Nakashima H. Modification of a mouldboard plough surface using arrays of polyethylene protuberances [J]. Journal of Terramechanics, 2007, 44(6): 411-422.
[15]Saunders C, Godwin R J, ODogherty M J. Prediction of soil forces acting on mouldboard ploughs [C]. Fourth International Conference on Soil Dynamics, Adelaide, 2000.
[16]Godwin R J, ODogherty M J. Integrated soil tillage force prediction models [J]. Journal of Terramechanics, 2007, 44(1): 3-14.
[17]刘进宝, 郑炫, 孟祥金, 等. 犁体耕作阻力模型仿真分析与试验研究[J]. 干旱地区农业研究, 2022, 40(1):264-274.
Liu Jinbao, Zheng Xuan, Meng Xiangjin, et al. Simulated analysis and experimental study on plough tillage resistance model [J]. Agricultural Research in the Arid Areas, 2022, 40(1): 264-274.
[18]刘坤宇, 苏宏杰, 李飞宇, 等. 基于响应曲面法的土壤离散元模型的参数标定研究[J]. 中国农机化学报, 2021, 42(9): 143-149.
Liu Kunyu, Su Hongjie, Li Feiyu, et al. Research on parameter calibration of soil discrete element model based on response surface method [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(9): 143-149.
[19]李俊伟, 佟金, 胡斌, 等. 不同含水率黏重黑土与触土部件互作的离散元仿真参数标定[J]. 农业工程学报, 2019, 35(6): 130-140.
Li Junwei, Tong Jin, Hu Bin, et al. Calibration of parameters of interaction between clayey black soil with different moisture content and soilengaging component in northeast China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(6): 130-140.
[20]宋少龙, 汤智辉, 郑炫, 等. 新疆棉田耕后土壤模型离散元参数标定[J]. 农业工程学报, 2021, 37(20): 63-70.
Song Shaolong, Tang Zhihui, Zheng Xuan, et al. Calibration of the discrete element parameters for the soil model of cotton field after plowing in Xinjiang of China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(20): 63-70.
