基于大数据及云计算技术的警务战术训练仿真系统设计
2024-05-17张若龙
张若龙
(陕西警官职业学院 警体部,西安 710021)
0 引言
虚拟现实技术的实现基础是计算机技术,用户在虚拟世界中通过设备和自然技能可以展开交互控制和浏览,逼真性良好[1]。虚拟现实技术近年来在各个领域中得到了广泛的应用,包括娱乐领域、训练领域、设计领域和医学领域等,具有良好的发展前景。在警务战术训练过程中引入虚拟现实技术可以减少训练经费,避免训练过程中的伤亡[2]。警务战术训练系统利用网络通信技术在实时三维场景中完成警务战术任务,训练过程中警务人员的表现,系统都能够完整记录下来,并给出训练评估结果,以此提高警员的警务战术技能。
唐上钦等人[3]在OODA空战理论的基础上分析了警务战术训练系统的功能需求,结合多层次模块化技术和DDS分布式仿真技术设计了警务战术训练仿真系统的整体架构,采用C++完成系统软件的开发,该方法采集的训练场景图像中存在大量的噪声,图像质量不高,降低了三维场景建模的精度,用户在系统中的沉浸感和体验感较差。于晓琳等人[4]在系统设计过程中通过传感器采集训练者在训练过程中的信号,引入视频图像识别技术判断并识别训练者的战术动作,将训练者的训练成绩通过无线传输方式传输到系统的后台管理中心中,实现警务战术训练仿真系统的设计,该方法在系统中切换和调用任务所需的时间较长,存在系统响应效率低的问题。
为了解决上述方法中存在的问题,提出基于大数据及云计算技术的警务战术训练仿真系统设计方法。在系统软件设计中应用了全卷积孪生网络,并引入大数据技术进行数据的采集和预测,重构相似块组,提高图像的清晰度。应用Google SketchUp软件构建训练场景矢量图,根据矢量图数据进行三维建模,提升软件系统的响应效率。
1 警务战术训练仿真系统
在警务战术训练仿真系统的开发和设计过程中应用云计算技术通过分解操作将网络云分为多个小程序[5-6],在小程序中利用服务器展开数据分析,并将分析结果传送给系统用户[7]。基于大数据及云计算技术的警务战术训练仿真系统的总体架构,如图1所示。

图1 系统总体架构
根据仿真系统总体构架划分警务战术训练仿真系统,构建警务战术训练仿真系统的分层模型,如图2所示。
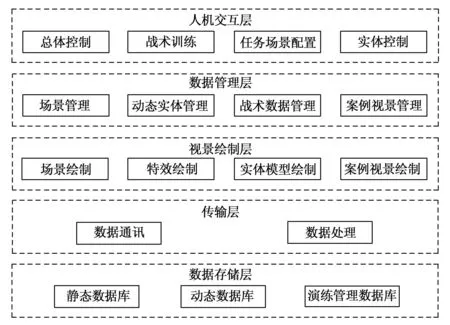
图2 分层模型
1)人机交互层。用户在人机交互层中可通过控制鼠标或键盘将操作指令传输给系统,以此实现人机交互[8-9]。根据用户对象类型以及控制功能间的差异性,可将人机交互层分为以下两个部分:
(1)总体控制:初始化系统,确定训练过程中所用的道路、建筑物等场景,初始配置并控制场景中的动态实体状况以及环境情况。其中动态实体状况包括警察、车辆以及嫌疑人的位置和数量等,环境情况包括不同光照程度的环境,如黑夜、白天等。
①环境控制:将控制指令输入至系统的主控制台中,更新建筑内部结构、建筑分布等场景参数。调整犯罪分子、警员的初始位置和数量等实体情况,为情景控制模块提供数据支持。
②运动控制:将控制指令传输到系统的战术训练过程中,计算参加训练的相关人员在系统中产生的训练数据,根据计算结果调整实体的姿态以及运动情况。
(2)战术训练:在战术训练模块终端中用户可以通过两种不同的方式参与训练:
①控制模式:用户在控制模式下对动态实体的视景窗展开控制,以此观察训练场景,利用键盘或鼠标控制训练实体根据控制指令进行战术训练。
②观察模式:用户在观察模式下无法直接对训练实体展开控制,因此利用多种视角观察训练场景,包括警员在训练场景中的第一人称视角,警员尾追视角以及警务战术训练场景的全景视角等。
2)数据管理层。数据管理层的主要任务是处理人机交互层传输的数据,并在外部数据的基础上生成用于描述动态实体和训练场景的三维数据。
(1)场景数据管理:根据不同的环境参数在系统中输入对应的场景描述文件,调整场景的状态,并建立对应的模型,获取实体在环境模型中的位置,生成任务场景的初始数据。
所提方法选用XML文件作为场景描述文件,用于管理并组织场景数据。在XML Schema的基础上建立三维场景描述模型,划分模型中存在的元素,获得三维场景模型的基本节点,包括资源元素、警务战术训练场景、场景光源以及警员实体等节点。分析上述基本节点之间存在层次关系,以此建立场景树,进而获得三维场景数据组织模型。该模型中包含元素的几何信息以及场景的抽象信息:
①几何信息:包括方向属性、范围信息以及位置信息等,主要用于绘制训练场景;
②抽象信息:包括运动状态属性、名称以及自然元素节点等,为视景管理提供数据支持。
(2)动态实体管理:根据运动控制模块输入的参数信息,用图形数据代替原始的物理数据,获取动态实体在训练场景中的运动数据。以此为依据,调整动态实景的空间姿态和运动情况,结合检测结果和指令确定训练场景中需要显示的实体,最后向视景管理模块传输转换处理后的三维数据。
(3)视景管理:将动态实体在训练场景中的运动状态作为视景管理依据,三维变换处理原始的训练场景,调整视景窗口内显示的内容,裁剪训练场景中的三维元素。
3)视景绘制层。该层在警务战术训练仿真系统软件中的运行基础是视景数据,该层主要的作用是绘制警务战术训练场景中的案件环境以及动态实体,并在训练场景中添加一些特效。主要采用OpenGL图形库[10]在视景绘制层中绘制训练场景、特效以及战斗实体。
4)传输层。警务战术训练仿真系统利用传输层完成战术训练模块与主控模块之间的数据通信与处理,该层的主要目的是确保各功能模块在警务战术训练仿真系统中的正常运行,保证数据在各模块间的传输安全。
(1)在数据初始化阶段,主控模块将数据传输到战术训练模块中,以此生成警务战术训练所需的案例场景;
(2)在战术训练阶段:利用数据传输层将相关数据传输到系统的主控模块中。主控模块对数据进行分析与汇总,获得警员的训练成绩。
5)数据存储层。该层在警务战术训练仿真系统中的主要作用是存储实时训练数据、案例数据信息、战术训练方案和实体模型数据等系统数据。
1.1 硬件设计
警务战术训练仿真系统通过主控模块生成可以使用仿真工具以及模拟射击训练的影像训练平台,为警员提供战术训练方案推荐以及训练数据分析的功能。在仿真系统中,警员可以逐渐掌握并熟练战术的基本动作和相关知识,在训练过程中结合实际情景进行对抗训练和思想判断训练,提高警员的战术水平。
基于大数据集及云计算技术的警务战术训练仿真系统设计方法设计的系统功能模块如下:
1)主控模块。该模块在系统中主要负责各科目的综合训练以及人机交互,在该模块中,通过添加STC15W408AS单片机控制板和ARM Cortex A8处理器,评估警员战术训练的成绩、设置训练科目、处理警务训练过程中产生的数据。
2)情景控制模块。警员在实战中的武力使用包括以下4类:武器制止;徒手制止;口头制止;警械制止。
警务战术训练仿真系统中根据不同的武力使用情况设置了多种训练场景,警员在训练过程中需要综合考虑警情敏感性、性质、当事人身份、涉及人数和影响范围等因素选择武力。
情景控制模块在警务战术训练仿真系统中具有实景编辑和实景训练的功能。
(1)实景训练。实景训练指的是实时播放、跳转以及切换视频,该功能主要通过情景控制模块中ZigBee情景控制器和、Lumi情景开关实现的。实景训练过程中的跳转表编辑的功能为:划分战术训练情节,并根据不同划分结果进行编号处理,列出使用催泪喷射剂触发和挥动警棍触发等触发条件,对触发后跳转的警务训练情节关联。存在多个触发条件时,系统可以设置任意一个触发、同时触发或按顺序触发等情况,最后保存编辑后的文件,根据系统设定的逻辑关系在战术训练过程中通过不同的武力手段展开具有情节跳转特征的警务战术综合训练。
(2)实景编辑。设置拍摄情景是实景编辑的基础,将警察执法过程中的实际案例作为警务战术训练仿真系统设置情景的素材,根据武力使用的等级模式、法律依据、文化背景、政策要求以及使用原则拍摄不同武力行为的视频情景。其中,武力使用等级属于设置视频拍摄脚本的重要依据。在执行任务的过程中,警员面对的违反犯罪行为人所采取的抗拒手段均不相同,与执法环境、警察防范程度、犯罪行为人身心状况和个性特点相关。因此为了合理、安全、合法地使用武力,警员需要根据法律法规分析执法人员的行为。
3)信息采集模块。信息采集模块中包含ADXL345三维加速度传感器和NI PCI-6229采集卡等硬件设备,在警务战术训练仿真系统中主要用于采集语言控制信号、警械具和武器信号、动态实体的躲避隐藏动作信号。根据采集的信号判断警员在战术训练过程中战术动作、武器和警械的使用情况。
4)判定模块。在警务战术训练过程中,警员采取的武力等级需要根据违法犯罪行为以及实际情况确定。但在实战中,大部分警员都无法在短时间内作出正确的判断。面对犯罪嫌疑人的表现行为,警员需要在短时间内确定武力等级。因此,在警务战术训练仿真系统中需要通过该模块中的LM386声音传感器和NVIDIA Tesla图像处理卡针对武力等级展开判定训练。在判定训练过程中,利用主控系统开展模拟训练,生成警械仿真与模拟射击的训练平台,在平台中为警员推荐训练的相关方案,并对训练数据展开分析,使警员通过判定训练实现思维判断与动作的结合,并记录训练过程中警员的行为表现,通过后续的成绩分析结果制定相应的调控策略。
5)信息管理模块。信息管理模块主要应用IBM System x3650 M5服务器和NetApp FAS8200存储设备,在警务战术训练仿真系统中的主要功能是输出警员的训练结果数据,该模块由两部分构成,分别是统计查询训练成绩和管理受训者信息。在系统数据库中存储受训者的信息,系统用户可以通过该模块查询并统计数据库中的信息,确认训练人员的警务战术能力,便于教官进行后续指导。
1.2 软件设计
结合地理信息系统与警务战术训练仿真系统需求搭建软件平台,建立训练场景的三维模型,在地理信息系统的基础上实现警务战术训练系统的开发设计。
主要包括警务战术三维场景的建设、浏览、战术仿真训练以及空间分析,警务战术训练仿真系统软件流程为:采集警务战术训练的视频图像,通过Google SketchUp建立训练区域的三维模型,利用ArcScene生成三维训练场景的sxd文档,通过ArcScene平台实现可视化操作和警务战术仿真训练,警务战术训练仿真系统的软件平台设计流程如图3所示。
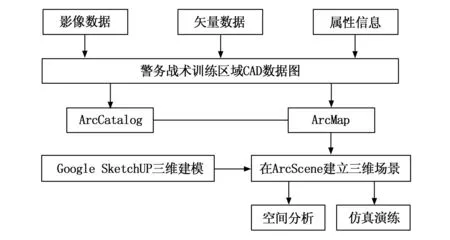
图3 警务战术训练系统软件设计流程图
1.2.1 基于影像数据相似块搜索算法的相似块组重构
为了提高警务战术训练场景三维建模的精度,基于大数据及云计算技术的警务战术训练仿真系统设计方法结合全卷积孪生网络和大数据技术提出一种影像数据相似块搜索算法,将马氏距离引入孪生网络以此获取不同图像块的相似性[11-12],针对噪声相似块与干净相似块,基于大数据及云计算技术的警务战术训练仿真系统设计方法建立了三元组损失函数,以此获取两者的潜在联系,重构相似块组,提升图像质量。
用M(yr,yj)表示马氏距离,其计算公式如下:
(1)
式中,yr、yj表示警务战术训练场景图像的图像块向量;∑代表的是参考图像块的协方差矩阵。
在获取M(yr,yj)的基础上,应用大数据技术采集战术训练场景中的图像数据,在采集的场景图像中选取m幅图像构成孪生网络的训练集,对图像展开中心裁剪,获得H×W的场景图像,分3次将高斯噪声加入场景图像中,利用干净的场景图像和含噪图像组成一对图像组合,通过高斯混合模型对干净场景图像中的参考块展开分类处理,并计算其协方差矩阵,计算干净参考块A在图像块分类搜索邻域内与噪声图像块cx之间存在的马氏距离,并对计算结果排序,参考块的相似块组标签选取前M个相似块。
利用图4所示的网络结构结合大数据技术预测cx与A的联系度,获取图像参考块所对应的相似块组,提取不同相似块的重构逻辑。
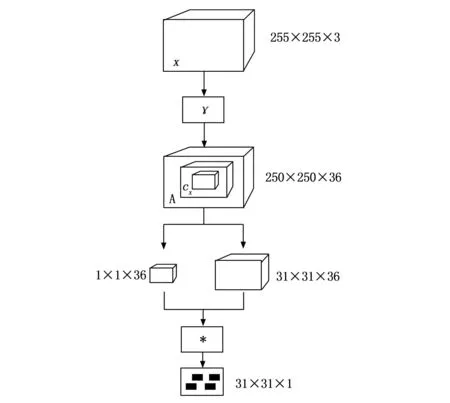
图4 全卷积孪生网络
图4中,x表示战术训练特征图像块;γ为特征提取网络;*代表的是图像块之间的相似性度量结果,所提方法选用马氏距离。在训练阶段中对x输入γ获得对应的特征,使特征图中存在的点通过映射转变为原始场景图像中的图像块,网络γ提取的特征图对应的维度为H×W×C,其中C描述的是通道数,W为图像对应的宽度,H代表的是图像对应的高度,用w×w表示参考块对应的邻域,根据参考块所处位置的1×1×C通道向量以及w×w内存在的其他图像块对应的w×w×C通道确定损失函数,利用函数对全卷积孪生网络展开优化。
在测试阶段,利用γ提取cx的大数据预测结果,计算参考块在1×1×C与w×w×C之间的M(yr,yj),输出w×w的特征图,特征图的值越小,表明特征图对应的图像块越接近图像的参考块。
通过上述过程获得图像参考块对应的相似块组,采用协同搜索原则对图像块展开重构处理,并将其放到场景图像的原始位置,实现相似块组的重构。
采用高斯混合模型[13-14]训练干净图像中的相似块组,获取其对应的外部先验信息,用Yn表示噪声相似块组,μn表示Yn的均值,通过外部字典在每个子空间k中展开内部字典学习:
Dk=M(yr,yj)x[Dk,E,Dk,l]
(2)
式中,Dk,l代表的是内部字典;Dk,E为图像的特征向量。正交字典Dk可以获取干净图像块在场景图像中的分布特点,但向量Dk,E不适用于原始场景图像,因此基于大数据及云计算技术的警务战术训练仿真系统设计方法利用Yn学习Dk,l,以此补充特征向量Dk,E。通过下述公式求解内部字典Dk,l:
(3)
式中,κ为正则化系数;S表示稀疏系数矩阵,通过t次迭代后获得稀疏系数矩阵S(t)和正交字典D(t),在此基础上重构噪声相似块组:
(4)
对重构后的相似块展开聚合处理,获得高质量的警务战术训练场景图像。
1.2.2 基于Google SketchUp软件的训练场景矢量图构建
地理信息系统(Arc GIS for Desktop)由ArcGlobe、ArcMap、ArcSence和ArcCatalog构成,用于处理地图数据,在该系统中ArcMap属于主要程序,其功能是制作和编辑训练场景地图,同时具有分层浏览地图的功能,可以编辑基本矢量图,在ArcMap中设计警务战术训练过程中的街区地图。ArcMap支持不同格式的图像文件,具有属性查询、缩放图层以及图层删除等功能,在ArcMap中可以完成战术训练场景区域地图元素的添加以及图层修改等操作。
ArcCatalog的主要用途是管理地图数据,类似于资源管理器。在警务战术训练场景三维建模过程中涉及的数据种类多且数量大,采用ArcCatalog可有效管理数据。
ArcSence软件具有3D可视化功能,在警务战术训练仿真系统中用于对训练场景三维模型的空间分析和可视化。用户通过ArcSence软件可以实现网上浏览和数据共享,在ArcSence软件中可以直接转换警务战术训练场景的三维数据。
ArcToolbox中存在地理统计分析、三维可视化分析和空间分析这三类扩展模块,可用于警务战术训练场景三维空间的管理。通过上述模块可将场景三维数据转变为三维文件和TIN等数据集。
为了保障软件系统的响应效率,根据上述软件系统所具有的功能,提出在获取基本矢量图的基础上,矢量图数据上传至云平台进行高精度储存,应用Google SketchUp软件处理基本矢量图数据,构建训练场景矢量图,根据矢量图数据进行三维建模。该软件具有功能全和操作简单等优点,具备生成阴影、贴图和制作材质等功能,适用于大规模的警务战术训练场景建模,可以使软件系统在切换仿真场景的过程中,保持连贯的调用效果。该软件可连同ArcGIS和Google Earth软件一起使用,利用SketchUp建立的警务战术训练场景三维模型可以直接在Google Earth的地图中发布[15-17],获得警务战术训练的三维场景,为场景街区的建模提供数据支持。
在SketchUp软件中可简单、高效地完成警务战术训练场景中建筑的建模,符合警务战术训练的需求[18-21],利用该软件建立的警务战术训练场景三维模型如图5所示。
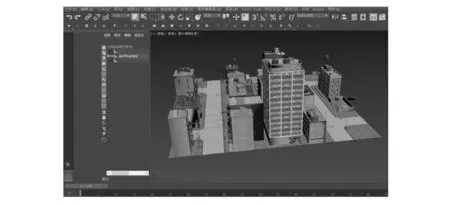
图5 警务战术训练场景三维模型
2 实验与分析
为了验证基于大数据及云计算技术的警务战术训练仿真系统设计方法的整体有效性,需要对其展开相关测试。在测试过程中引入文献[3]方法和文献[4]方法作为对比方法。
场景数据的采集质量直接影响着场景建模的精度,现采用基于大数据及云计算技术的警务战术训练仿真系统设计方法、文献[3]方法和文献[4]方法展开场景数据采集测试,对比不同方法的数据采集质量,结果如图6所示。
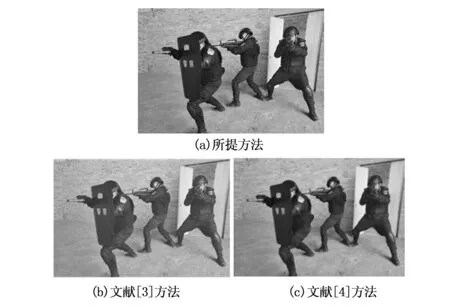
图6 场景图像采集结果
分析图6可知,文献[3-4]方法采集的场景图像存在噪声,图像清晰度较差,无法获取场景图像中的细节信息和纹理信息。而所提方法采集的场景图像细节和纹理信息具有较高的清晰度,可完整提取场景中的元素,为警务战术训练场景的三维建模提供了可靠依据。
为了进一步评价上述方法的图像采集和处理效果,在测试过程中引入峰值信噪比指标测试图像去噪的效果,峰值信噪比PSNR越高,表明场景图像去噪后的质量越好。峰值信噪比PSNR的计算公式如下:
(5)
式中,MSE为场景图像颜色的最大值;MAX为原始场景图像与去噪后图像的均方误差。
结构相似度描述的是去噪后场景图像与原始图像之间的相似度,结构相似度越高,场景图像去噪效果越好。所提方法、文献[3]方法和文献[4]方法的峰值信噪比与结构相似度的测试结果如表1所示。
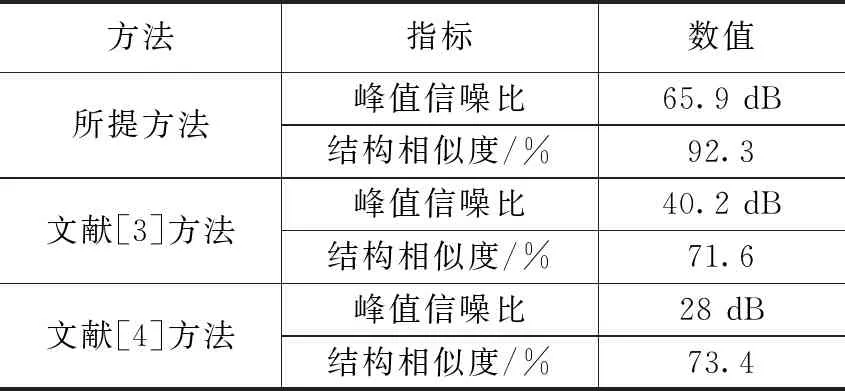
表1 不同方法图像采集与处理效果
分析表1中的数据可知,所提方法的峰值信噪比和结构相似度均高于其他两种方法,表明所提方法在场景图像处理过程中具有良好的去噪效果,可获得高质量的场景图像。
三维场景建模是警务战术训练仿真系统的关键,三维场景建模的精度直接影响着警员的战术训练结果,所提方法、文献[3]方法和文献[4]方法利用采集的场景图像建立的三维模型如图7所示。
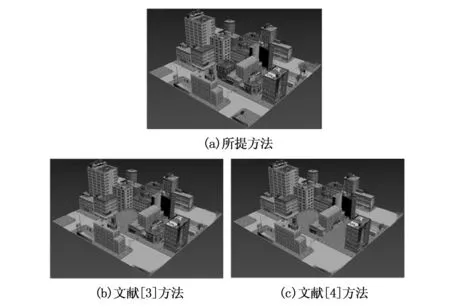
图7 场景三维建模结果
根据图7可知,所提方法建立的警务战术训练场景还原度较高,完整地还原了场景中的细节信息,因为所提方法利用高质量的场景图像在Google SketchUp软件中完成警务战术训练场景的三维建模,文献[3]方法和文献[4]方法建立的警务战术训练场景模型与所提方法相比缺少细节信息,无法完整还原训练场景。通过上述测试可知,所提方法具有较高的三维建模精度,可有效提高警员在警务战术训练仿真系统中的沉浸感与体验感,有助于优化警员的战术训练效果。
为了提高警务战术训练系统的训练性能,系统在运行过程中需要不断调用并切换警务战术任务,采用所提方法、文献[3]方法和文献[4]方法设计的系统展开警务战术训练,测试上述方法的任务调用和任务切换时间,结果如图8和图9所示。

图8 任务调用时间

图9 任务切换时间
分析图8和图9可知,随着警务战术训练仿真系统并发用户数量的增加,所提方法、文献[3]方法和文献[4]方法调用和切换任务所需的时间增长,在相同并发用户数量下,所提方法调用和切换任务的时间均低于文献[3]方法和文献[4]方法,表明所提方法设计的警务战术训练仿真系统具有较高的响应效率。
3 结束语
针对目前警务战术训练仿真系统存在的图像采集质量差、三维建模精度低和系统响应效率低的问题,提出基于大数据及云计算技术的警务战术训练仿真系统设计方法,该方法在硬件设计过程中确定了警务战术训练仿真系统的总体架构和功能结构,在软件设计过程中进行训练场景相似块组重构,提高了图像的整体质量,利用处理后的矢量图实现警务战术训练场景高精度的三维建模,在训练任务调用和切换方面,所提方法设计的系统表现出良好的响应性能。
